

Радиотехнические системы
..pdf61
Сигнал, отраженный от распределенной цели, является результатом сложения переизлучений элементарных отражате- лей, оказавшихся в пределах элемента разрешения РЛС.
Формирование отраженного сигнала даже для объектов простой геометрической формы представляет собой сложный процесс, зависящий, в частности, от поляризации волны, облу- чающей объект.
Если падающая волна содержит горизонтально и верти- кально поляризованные компоненты Е1г и Е1в , то при отраже- нии соотношение между ними может измениться,
æ E2г ö |
æ с11 |
с12 |
öæ E1г ö |
|
||
ç E |
÷ |
= ç |
с |
с |
÷ç E ÷ |
, |
è |
2в ø |
è |
21 |
22 |
øè 1в ø |
|
где Е2г , Е2в - горизонтально и вертикально поляризованные компоненты отраженной волны,
с11, с22 - комплексные коэффициенты преобразования од- ноименных компонентов поля,
с12 , с21 - комплексные коэффициенты, характеризующие
перекрестные преобразования компонентов падающего поля в отраженное.
Матрицу комплексных коэффициентов отражения
æ |
с11 |
с12 |
ö |
|
С = ç |
с |
с |
÷..... |
(2.2) |
è |
21 |
22 |
ø |
|
называют поляризационной матрицей рассеяния цели. Она дает полную характеристику отражающих свойств радиолокацион- ной цели.
2.2. Методика вычисления ЭПР элементарных объектов
Основой для вычисления эффективной поверхности рас- сеяния является её определение, математически выраженное формулой (2.1),

62
σ Э = 4π R2 П2 .
П1
Пусть E&1 и E&2 - комплексные амплитуды поля у цели и локатора, соответственно. Тогда
σ Э = 4π R2 E&&2 2
E1 2
Соотношение между E&1 и E&2 можно найти на основании принципа Гюйгенса:
E2 |
|
& |
|
|
|
E |
|
РЛС |
Θ |
1 |
|
Цель |
|||
|
|
||
|
|
N |
Рисунок 2.1. Иллюстрация к расчету ЭПР элементарной цели
|
|
1 |
. |
|
4π ×R |
. |
j 4π R0 |
|
j 4π d |
|
. |
|
E j |
E |
|
|
|||||
E2 |
= |
|
ò R |
e |
λ cosQ×dS = |
|
e λ |
ò |
e λ |
cos Q×dS , |
λ |
λR |
|||||||||
|
1 |
1 |
|
|||||||
|
|
|
S |
|
|
|
|
S |
|
|
где Θ - угол между направлением падения волны в неото- рую точку цели и нормалью к поверхности цели в этой точке, интегрирование ведется по всей освещенной поверхности цели;
R0 - расстояние до какой-либо характерной точки цели;
R = R0 + d .
Отсюда получаем расчетную формулу
σ Э = 4λπ2 |
|
òS e j |
4π |
d cos Q×dS |
|
2 |
|
|
|
|
|||||
|
|
|
|
||||
|
λ |
|
. |
(2.3) |
При выводе данной формулы не учтены поляризацион-

63
ные эффекты. Поэтому она является приближенной. Рассмотрим частные случаи.
Пусть волна падает нормально на плоский металличес- кий лист площадью S . Тогда cos(Θ) = 1, d = 0 .
S
Рисунок 2.2. Иллюстрация к расчету ЭПР листа
Из формулы (2.3) получаем
|
|
4π |
|
òS |
|
|
2 |
4π S2 |
|
|
|
|
|||||
σ Э |
= |
|
dS |
|
= |
|||
|
|
λ2 |
|
|
|
|
λ2 |
|
При S =1 м2, |
λ = 0.1 м: σЭ =1256 м2, т.е. при нормаль- |
|||||||
ном падении волны ЭПР гораздо больше, чем реальная пло- щадь листа.
При отклонении угла падения волны от нормали к повер- хности листа, его ЭПР сильно уменьшается. Диаграмма переиз-
лучения листа подобна диаграмме направленности зеркальной антенны, имеющий такой же раскрыв, как поверхность листа.
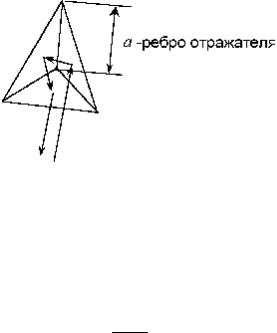
В ряде случаев требуется иметь объекты радиолокацион- ного наблюдения, ЭПР которых мало зависит от направления падения волны. Одним из таких объектов является уголковый отражатель - искусственная радиолокационная цель. Уголковый отражатель состоит из трех взаимно перпендикулярных метал- лических листов.
64
Рисунок 2.3. Уголковый отражатель
Троекратно отражаясь от его граней, падающая волна на- правляется в ту же сторону, откуда пришла.
В телесном угле 45o относительно оси симметрии отра-
жателя его эффективная поверхность рассеяния подчиняется формуле
σ = 4π a4 Э 3λ2 ,
где a - размер ребра отражателя.
Если a =1 м, λ = 0.1 м, то σЭ = 419 м2.
Таким образом, ЭПР уголкового отражателя несколько меньше, чем у квадратного металлического листа со стороной, равной ребруотражателя при нормальном падении на него элек- тромагнитной волны. Однако уголковый отражатель сохраняет большое значение ЭПР в широком угловом секторе, в то время
как ЭПР листа резко уменьшается при отклонении направления облучения от нормали.
Уголки являются "блестящими точками" реальных целей. Пусть теперь цель - гладкий металлический шар радиуса rШ . Используя формулу (2.3), можно показать, что если r >> λ ,
то σ Э = π rШ2 . То есть эффективная поверхность рассеяния глад- кого металлического шара равна площади его поперечного се- чения независимо от длины волны. Данное соотношение со-

65
гласуется с определением ЭПР, поскольку шар рассеивает пада- ющие на него волны во все стороны в передней полуплоскос- ти. При уменьшении радиуса шара по отношению к длине вол-
ны до rШ / λ £ 2 , у функции σ Э = f (rШ / λ) появляется ряд резо-
нансных максимумов и минимумов, шар начинает вести себя как вибратор (см. рисунок 2.4).
Рисунок 2.4. ЭПР шара
При диаметре шара близком к 0,5λ ЭПР шара в 4 раза пре- вышает площадь его поперечного сечения. Для малого шара ( r ≤ λ / 2π ) ЭПР определяется дифракционной формулой Рэлея
σ Э = 4,4 ×104 × r6 / λ4 и сильно зависит от длины волны. Форму- лой Рэлея можно аппроксимировать ЭПР капель дождя и тума- на σ К . Учитывая, что это капли воды с диэлектрической про-
ницаемостью ε = 80 , получено [4] |
|
σ К = 306d К6 / λ 4 , |
(2.4) |
где dК - диаметр капель. |
|
Найдем также ЭПР полуволнового вибратора. |
|
Пусть линейный вибратор длиной l облучается волной с
66
амплитудой напряженности электрического поля E1 по направ-
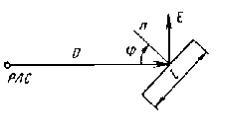
лению, составляющему угол ϕ с нормалью к вибратору. Пред- положим, что волна линейно поляризованная, причем вектор электрического поля лежит в той же плоскости, что и вибратор и прямая РЛС-вибратор (см. рисунок 2.5).
Рисунок 2.5. К расчету ЭПР полуволнового вибратора
Под действием падающего поля в вибраторе возникает ток с амплитудой
I = E1hд cosϕ / zвх ,
где hд - действующая высота вибратора,
zвх - входное сопротивление вибратора.
При протекании тока возникает вторичное излучение. Амплитуда напряженности составляющей вторичного поля, совпадающей по поляризации с падающим, в месте располо-
жения РЛС может быть вычислена по формуле
E2 = |
60π Ih cosϕ |
= |
60π E h2 cos2 |
ϕ |
, |
|
д |
1 д |
|
(2.5) |
|||
λR |
λDzвх |
|
||||
|
|
|
|
|
где R - расстояние до РЛС.
Используя далее определение ЭПР, находим
|
|
2 |
|
E& |
|
|
2 |
4π |
3 3600h4 |
cos4 ϕ |
|
|
|
|
|
||||||||
σ |
Э = 4π R |
|
2 |
|
|
= |
|
д |
|
(2.6) |
|
|
|
E& |
|
|
|
λ 2 z2 |
|
||||
|
|
|
|
1 |
|
|
|
|
вх |
|
|
67
Для полуволнового вибратора hд = λ /π и zвх = 73,1Ом . Подставляя эти значения в (2.6) получаем
σ Э = 0,86λ2 cos4 ϕ..... |
(2.7) |
Значения σЭ меняются от максимального σ Э = 0,86λ2 ,
имеющего место при расположении вибратора параллельно вектору напряженности падающего электрического поля, до
σ Э = 0 при расположении вибратора перпендикулярно к нему.
Так как поляризация переизлучаемого вибратором сигна- ла параллельна его оси, множество произвольно ориентирован- ных вибраторов создают неполяризованный сигнал, который принимается антенной РЛС, на какую поляризацию она бы ни была рассчитана. Это позволяет использовать облака полувол-
новых вибраторов в виде металлизированного стекловолокна либо полосок фольги для радиолокационной маскировки лета- тельных аппаратов.
2.3. ЭПР реальных целей
Реальные радиолокационные цели обычно имеют слож- ную геометрическую форму. Принимаемый сигнал является ре- зультатом интерференции множества волн, отраженных от от- дельных частей цели. Даже небольшое изменение взаимного положения цели и локатора вызывает существенные измене- ния фазовых соотношений интерферирующих волн и, как след- ствие, мощности принимаемого сигнала. Таким образом, ЭПР - случайная величина. Задать ее можно только законом распре- деления вероятностей. Найдем этот закон.
Заметим, что в соответствии с формулой (2.1) ЭПР про- порциональна плотности потока мощности рассеянного сигна- ла у локатора П2 , и что мощность принимаемого сигнала PПР = П2 ×SА , где SА - эффективная приемная площадь антенны.
Поэтому флуктуации ЭПР воспринимаются как флуктуации мощности принимаемого сигнала. Принимаемый сигнал имеет
68
вид: uПР (t) = U(t)cos[w0t +ϕ(t)] , где U(t),ϕ(t) - случайные амплитуда и начальная фаза. Вследствие множественности от-
ражений его можно считать случайным нормальным процес- сом.
Если все точки цели отражают приблизительно одинако- во, то сигнал uПР - стационарный нормальный случайный про- цесс. Его огибающая сигнала U (t) имеет Релеевский закон рас- пределения вероятностей.
W (U ) = |
U |
e− |
U 2 |
|
2σ 2 |
||||
|
||||
|
σ 2 |
|
||
, U > 0 |
(2.8) |
Говорят, что в этом случае цель не имеет блестящих то-
чек.
Если же цель имеет блестящие точки, то огибающая U (t)
подчиняется обобщённому Релеевскому распределению. Блестящие точки - места преимущественного отражения -
создаются уголками и плоскими поверхностями конструкций целей. Несмотря на то, что наличие блестящих точек характер- но для многих целей, на практике часто ограничиваются рас- смотрением первого случая, во избежание неоправданных ма- тематических сложностей. Ограничимся рассмотрением перво- го случая и мы.
Испольуя правила нахождения законов распределения ве- роятностей функций случайных величин, получим из формулы
(2.8), учитывая, что PПР :U 2 ,
W (σ Э ) = |
1 |
|
− |
|
σЭ |
, σЭ |
³ 0 |
(2.9) |
|
|
|
|
e σЭ |
||||||
|
|
|
|||||||
σЭ |
|||||||||
- плотность распределения вероятностей ЭПР цели, не имею- щей блестящих точек.

69
W(σЭ) |
σЭ |
Рисунок 2.6. Кривая распределения вероятностей ЭПР
Полученный экспоненциальный закон распределения ЭПР очень удобен для практических расчётов. Единственный
параметр экспоненциального распределения σ Э - его матема-
тическое ожидание и одновременно среднеквадратическое от-
клонение
σЭ = M [σЭ ] = 
 D[σЭ ] = СКО
D[σЭ ] = СКО
Применяя экспоненциальный закон как характеристику реальных целей, параметр σ Э оценивают, усредняя значения
ЭПР, полученные при разных направлениях облучения. Приведем среднее значение ЭПР некоторых реальных це-
лей [4]: |
- (3÷5) м2; |
истребитель |
|
головка МБР |
- (10-3÷1) м2; |
транспортный самолёт |
- (50÷100) м2; |
корабль |
- до 10000 м2. |
Иногда возникает необходимость увеличения или умень- шения ЭПР реальных объектов. Так для увеличения дальности обнаружения спасательных шлюпок и плотов на них устанав- ливают уголковые отражатели. Для ухудшения радиолокацион- ной наблюдаемости объектов военной техники (самолетов, ра- кет, кораблей и т.д.) стараются снизить их ЭПР рациональным выбором конфигурации поверхности и применением покрытий, уменьшающих отражение радиоволн.
Для некоторых приложений знание одномерной плотно- сти распределения вероятностей ЭПР недостаточно, нужны ха-

70
рактеристики, определяющие её временную изменчивость. Та-
кими характеристиками могут быть корреляционная функция или энергетический спектр флуктуаций, связанные между со- бой преобразованием Фурье. Временные флуктуации ЭПР оп- ределяются изменением взаимного положения РЛС и цели, вза- имным перемещением элементарных отражателей, изменени- ем их состава при сканировании ДНА.
При большой относительной скорости перемещения РЛС и цели ширину спектра флуктуаций отраженного сигнала мож-
но рассчитать по разности доплеровских частот для крайних точек цели. Если угловая ширина цели от точки расположения
РЛС θЦ , а курсовой угол её середины (угол между вектором
относительной скорости υ и направлением на цель) равен α ,
то ширина спектра флуктуаций отраженного сигнала
F = 2λυ θЦ sinα .
Зная ширину спектра можно рассчитать время корреляции сиг-
нала τ0 = 1/ F .
Кроме флуктуаций мощности сигнала, отраженного от цели, имеют место флуктуации фазового фронта отраженной волны. Физической причиной данных флуктуаций, получивших название «угловых шумов цели» является то обстоятельство, что фазовый фронт волны, отраженной от многоточечного объекта не является сферой [10]. Угловые шумы приводят к погрешнос- тям пеленгования и будут рассмотрены в соответствующем раз- деле.
2.4. Эффективная поверхность рассеяния объёмно-распределённых целей
Если геометрические размеры цели больше элемента объемного разрешения РЛС, то такие цели называются объём- но-распределенными. Цели этого вида - различного рода обла- коподобные образования (дождь, снег, град, облака, тучи и т.п.).