

Радиотехнические системы
..pdf131
Дальность отсчитывают по потенциометру, управляюще- му задержкой, а не по экрану ЭЛТ.
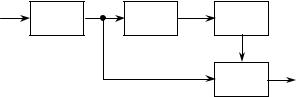
Схемы автосопровождения отличаются от схем ручного сопровождения тем, что задержка вводится не оператором, а автоматически (см. рисунок 5.10). Режиму сопровождения пред- шествует режим захвата цели.
от пр. |
Врем. |
|
|
|
Сх. управления |
|
||||
|
|
|
|
|
|
|
||||
от ГПИ |
различ-ль |
|
|
|
(экстраполятор) |
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
U ~ R |
||||
Каскад |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
задержки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.10. Обобщённая структурная схема автодальномера
Структурная схема, изображенная на рисунке 5.10, допус- кает множество технических реализаций. Для каждой из них должны выполняться следующие закономерности:
а) выходное напряжение временного различителя ( диск- риминатора) должно быть нечетной функций временного рас- согласования сигнального импульса и строба;
б) задержка строба относительно синхронизирующего
импульса в каскаде задержки должна быть линейной функцией управляющего напряжения.
Экстраполятор из импульсного сигнала вырабатывает на- пряжение постоянного тока, необходимое для управления за- держкой.
5.1.3.2.Автоматическое сопровождение в режиме непрерывного слежения за целью
Рассмотрим одну из типовых схем радиолокационных ав- тодальномеров, осуществляющую сопровождение в режиме непрерывного слежения за целью. Последнее означает, что им- пульсная последовательность отраженных от цели сигналов не- прерывно поступает на вход локатора. Типичный случай имеет

132
место при сопровождении цели по угловым координатам. Ра- бота дальномера, выполненного по схеме, представленной на рисунке 5.11, поясняется эпюрами напряжений, рисунок 5.12.
от |
|
Селектор |
3 |
|
|
|
|
приёмника |
|
по R |
4 |
|
|
|
|
(детект.) |
|
10 |
И |
6 |
|
|
|
|
|
|
|
|
|
||
|
|
Ген.селек. |
Ген. имп. |
|
__ |
8 |
9 |
|
|
|
|
ò |
|||
|
|
импульсов |
слежения |
|
|
|
|
|
|
2 |
5 |
И |
7 |
|
|
от ГТИ |
1 |
|
|
|
|
||
Каскад |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
задержки |
|
|
|
|
|
Рисунок 5.11. Структурная схема радиолокационного автодальномера
Эпюры напряжений на рисунке 5.12 а), б) выполнены в разных временных масштабах, чтобы наглядно показать как про- цессы, происходящие на периоде повторения TП , так и в тече- ние длительности импульсов.
Задним фронтом импульса 2, формируемого схемой задер- жки СЗ, запускаются селекторные импульсы по дальности 10 а также импульсы слежения 4, 5. Импульсы 4, 5 принято назы- вать полустробами. Интегратор выполняет функцию
t
UВЫХ ò = òc × dt = ct + c0
0
Нетрудно видеть, что напряжение на выходе интегратора не будет изменяться и, следовательно, не будет изменять вре- менное положение полустробов, когда задний фронт первого из них будет совпадать с серединой полезного сигнала.
Схема обладает следующими особенностями:
1)измерение временного рассогласования производится
вмоменты времени, отстоящие друг от друга на период повто- рения (не непрерывно);
2)в промежутках между измерениями система действует
всоответствии со значением рассогласования, измеренным в

133
начале текущего периода.
1
t
2
 τ
τ
t
а) 10
t
3
|
|
t |
2 |
|
|
|
t |
|
|
|
|
4 |
|
|
|
|
|
|
I |
t |
|
|
|
5 |
|
|
|
|
 II t
II t
6
t
7
t
8
t
9
б)
t
Рисунок 5.12. Эпюры напряжений к схеме рисунка 5.11
134
Таким образом, система обладает памятью по положению: Если цель перемещается слишком быстро, происходит срыв слежения. Это бывает, если временное перемещение отраженно- го сигнала за период повторения превосходит его длительность. Если включить второй интегратор в цепь управления задер- жкой, как показано на рисунке 5.13, то схема будет обладать памя-
тью по скорости.
Аналогичным образом можно включить в схему и третий интегратор. Тогда следящий дальномер будет обладатьпамятью по ускорению.
Количество интеграторов в схеме экстраполятора определя- ет порядок астатизма следящего дальномера как системы автома- тического регулирования [6].
ò |
k |
ò |
|
|
å |
Рисунок 5.13. Структурная схема экстраполятора с двумя интег-
раторами
Погрешность сопровождения складываются из сле- дующих составляющих.
1)динамическая погрешность;
2)погрешность за счёт внутренних шумов приемни-
ка.
Так как указанные погрешности независимы, резуль- тирующая дисперсия равна сумме дисперсий составляю- щих,
σR2 = σR2 D +σ R2 Ш
Для оценки динамической погрешности представим движение цели рядом Тейлора,
R (t) = R (t |
) + dR Dt + |
1 |
× d 2R Dt2 |
+ L |
(5.7) |
0 |
dt |
2 |
dt2 |
|
|
Динамическая погрешность определяется членами

135
ряда, номера которых выше, чем количество интеграторов в схеме управления задержкой. Для исключения динами-
ческой погрешности астатизм системы должен быть на единицу больше номера высшей производной в разложе-
нии (5.7) функции R(t) в ряд Тейлора.
Для оценки шумовой составляющей, заметим, что схе- ма автодальномера формально идентична схеме корреля- ционного приемника (см. рисунок 5.10). Разница заклю- чается в том, что на перемножитель подается не копия сигнала, а полустробы. Тем не менее, чтобы оценить шу- мовую составляющую погрешности, воспользуемся форму- лой для дисперсии эффективной оценки временного по- ложения сигнала в присутствии белого гауссовского шума.
2 |
æ c |
ö2 |
|
|
1 |
|
||
σR Ш |
= ç |
|
÷ |
× |
|
|
, |
|
2 |
2E |
2 |
||||||
|
è |
ø |
|
|
||||
|
|
|
|
|
|
DfСК |
|
|
|
|
|
|
|
N0 |
|
||
|
|
|
|
|
|
|
||
где E - энергия сигнала за время измерения.
Время измерения определяется постоянной времени эк- страполятора, представляющего собой с точки зрения те- ории электрических цепей фильтр низких частот.
Реально полоса пропускания экстраполятора F = (0,5 ÷ 2) Гц, а его постоянная времени
T1 = 1DF1 = (0,5 ¸ 2) с.
Энергию сигнала за время измерения определим как E = E1N , где E1 - энергия одиночного импульса, N - коли- чество эффективно интегрируемых импульсов,
N » T1 = FП . Таким образом N имеет порядок тысяч и
TП DF1
шумовая ошибка оказывается малой. Это является одной из причин широкого применения автодальномеров.

136
5.1.4. Цифровые схемы импульсных дальномеров
Рассмотрим вначале простейшую схему (см. рисунки 5.14,
5.15)
от ГТИ |
1 |
|
|
3 |
|
|
5 |
|
|
||
Т |
|
И |
|
Сч |
|||||||
|
|
|
|
||||||||
|
|
|
|
||||||||
от ПР |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Генер. |
|
|
|
|
|
|
|
|
|
Счётн.имп. |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.14. Простейшая схема цифрового импульсного дальномера
1
t
2 |
|
τЗ |
||
|
|
|||
|
|
|
t |
|
3 |
|
|
|
|
|
|
|
|
|
t
4
t
5
t
Рисунок 5.15. Эпюры напряжений в схеме на рисунке 5.14
Триггер Т сигналом от генератора тактовых импульсов переводится в состояние «единица» и сигналом от приемни- ка в состояние «ноль». На его выходе получается импульс, длительность которого равна задержке сигнала на трассе рас- пространения. Данный импульс открывает схему совпадений,
через которую сигналы от генератора счетных импульсов с периодом TСЧ поступают на счетчик. Количество импульсов пропорционально дальности до цели с точностью до ошиб- ки дискретности.

137
Погрешность измерения случайна и распределена равно-
мерно на интервале 0 ¸ |
cTСЧ |
. Среднеквадратическая погреш- |
|||||||
|
|||||||||
ность σ R |
= |
cTСЧ × |
1 |
|
2 |
|
|||
|
|
. Период счетных импульсов T обыч- |
|||||||
|
|
|
|||||||
2 |
3 |
||||||||
|
|
2 |
|
|
|
СЧ |
|||
|
|
|
|
|
|
|
|
||
но выбирают равным 0,5τn . Разрядность r двоичного счетчи-
ка определяется из соотношения
2r ³ 2TП . τn
Достоинство схемы - простота. Недостаток - работает только по одной цели. Можно дополнить ее, чтобы она работа- ла в режиме автосопровождения.
Цифровые импульсные дальномеры, работающие по мно- гим целям, устроены так, что счетчик считает счетные импуль- сы в течение всего периода повторения, начиная с момента из- лучения зондирующего сигнала. С приходом отраженного от
цели сигнала код дальности сбрасывается из счетчика в ЭВМ (см. рисунок 5.16).
Рисунок 5.16. Схема преобразования дальности в двоичный код и временная диаграмма, поясняющая ее работу

138
5.2.Фазовый метод измерения дальности
5.2.1.Принцип действия фазовых дальномеров
Принцип действия фазовых дальномеров поясняется структурной схемой на рисунке 5.17. Предполагается, что излу- чается непрерывный немодулированный сигнал. Дальность до объекта наблюдения оценивается по разности фаз между излу- ченным и принятым сигналами, которая измеряется фазомет- ром Ф на несущей частоте.
Пер.
Ф
Пр.
Рисунок 5.17. Простейшая схема фазового дальномера
Пусть |
|
uИзл (t) = U0 |
cos(ω0t), |
|
{ |
|
ψ1 |
uПр |
(t) = UПр cos(ω0t −ω0TЗ |
−ϕПр |
−ϕОтр ) |
|
14444244443 |
||
|
|
ψ 2 |
|
Тогда измеряемая разность фаз
ϕ =ψ1 −ψ 2 = ω0τ З −ϕПр −ϕОтр ,
где ϕПр - фазовый сдвиг сигнала в приемнике; ϕОтр - изменение фазы сигнала при отражении (либо переизлучении).
Отсюда
τЗ = |
2R |
= |
ϕ −ϕПр |
−ϕОтр |
, |
|
c |
|
ω0 |
||||
|
|
|
|
|||
следовательно
R = c(ϕ −ϕПр −ϕОтр ) . 2ω0
Для исключения из формулы неизвестных ϕПр , ϕОтр про- изводят измерение разности фаз на известной дальности. Пусть дальности R = R0 соответствует ϕ = ϕ0 , тогда для дальности R

139
имеем |
|
|
|
|
R − R = |
c(ϕ −ϕ0 ) |
. |
(5.8) |
|
2ω0 |
||||
0 |
||||
|
|
|
Таким образом, в рассмотренном варианте метод позво- ляет измерять перемещение объекта наблюдения и, следователь- но, его скорость, если известно за какое время это перемещение произошло.
Особенность метода - высокая точность измерения. Дей- ствительно, предположение, что разность фаз ϕ измеряется со среднеквадратической погрешностью σϕ . Тогда из формулы (5.8) следует, что
σ R = σ2ϕω×0c .
Увеличивая частоту ω0 при фиксированной среднеквад- ратической фазовой погрешности σϕ , имеем возможность сколько угодно уменьшать σR . Однако, неограниченному уве- личению частоты препятствует возникновение неоднозначно-
сти фазовых измерений
R = 2π c |
= |
c |
= λ |
|
|
||||
Одн |
2ω0 |
|
2 f0 |
2 . |
|
|
|||
К достоинствам метода относится и отсутствие мёртвой зоны.
Принципиальный недостаток схемы, представленной на рисунке 5.17, заключается в невозможности развязать приём- ную и передающую антенны, поскольку прием и передача вы- полняются непрерывно на одной и той же частоте. На входе приемной антенны имеется суммарное гармоническое колеба- ние, фаза которого существенно отличается от фазы полезного сигнала. Поэтому фазовые дальномеры по схеме рис. 5.17 не реализуются.
Развязку приемного и передающего трактов можно обес- печить двумя способами:
1) использовать доплеровский сдвиг сигналов, отражён-
140
ных (переизлученных) от движущихся объектов.
2) применить активный ответ на другой частоте. При этом надо учитывать, что разность фаз между сигналами разных час- тот непрерывно изменяется и не может быть измерена. Выход - применение в запросчике и ответчике несущих частот, относя- щихся как простые числа,
ωЗап = ωОтв .
m n
Измерение фазового сдвига производится в запросчике на
частоте ωОТВm = ωЗАП n .
Частота, на которой производятся фазовые измерения, называ- ется масштабной. При этом не решается проблема неоднознач- ности, поскольку интервал однозначного измерения дальности оказывается равным λМ / 2, где λМ - длина волны, соответству- ющая частоте ωМ . Для её решения в схему включают грубый измеритель, который измеряет дальность с точностью до ин- тервала однозначности точной системы.
В другом варианте измерения производятся на частоте модуляции, прием и передача развязаны по несущей частоте.
5.2.2. Фазовый дальномер с измерением разности фаз на частоте модуляции
Рассмотрим структурную схемудальномера, рисунок 5.18. Дальномер содержит точный и грубый измерители, работаю- щие на частотах F1 и F2 , причем F1 < F2 . На частоте F2 произ- водится точное измерение, на частоте F1 - грубое, предназна- ченное для устранения неоднозначности. Гармонические коле- бания с частотами F1 и F2 генерируются в запросчике, посту- пают на фазометры Ф1 и Ф2 , а также модулируют излучаемый запросный сигнал на несущей частоте ωЗАП . Ответ осуществля- ется на несущей частоте ωОТВ . С выхода приемника ответного сигнала колебания с частотами F1 и F2 выделяются фильтрами