

Радиотехнические системы
..pdf
|
101 |
∞ |
∞ |
y (t) = òh(τ )s (t -τ )dτ = k × òs (t0 -τ )s (t -τ )dτ . |
|
0 |
0 |
Из последней формулы видно, что сигнал на выходе со- гласованного фильтра (СФ) совпадает по форме с автокорреля- ционной функцией (АКФ) входного сигнала. Ширина АКФ по
порядку равна интервалу корреляции: τИ .ВЫХ =τ0 = |
1 |
, |
f - |
|||||
Df |
||||||||
|
|
|
|
|
|
|
||
ширина спектра сигнала. |
|
|
|
|
|
|
||
|
τИ |
= |
τИ |
=τИ Df = b, |
|
|
|
|
τИ.ВЫХ |
1 |
|
|
|
||||
|
|
|
|
|
||||
|
Df |
|
|
|
|
|||
|
|
|
|
|
|
|
||
то есть выходной импульс сжимается в базу раз по сравнению с выходным, при этом его амплитуда возрастает в соответствии с законом сохранения энергии. В современных системах база достигает тысяч.
В качестве примера рассмотрим фазокодоманипулирован- ный (ФКМ) сигнал - импульсный сигнал, разбитый на парци- альные импульсы, у каждого из которых своя начальная фаза. Схематически такой импульс представлен на рисунке 3.22.
τИ
τ1
Рисунок 3.22. ФКМ сигнал
Имеют место соотношения:
Df = |
1 |
; |
Df ×τИ |
= |
τИ |
= N |
, |
||
τ |
|
||||||||
|
|
|
|
τ |
1 |
|
|||
|
|
1 |
|
|
|
|
|
||
102
где N - количество парциальных импульсов в ФКМ сигнале. Коды фазы обычно бинарные, но бывают и более слож-
ные.
Для синтеза оптимального обнаружителя ФКМ сигнала будем рассматривать его как пачкукогерентныхимпульсов. Схема оптимального обнаружителя пачки когерентных радиоимпуль- сов синтезирована в подразделе 3.3 и представлена на рисунке 3.10. Очевидно, в данном случае схема должна иметь следую- щие особенности:
-задержка между соседними отводами линии задержки должна быть равна длительности парциального импульса τ1 ;
-в некоторые отводы линии задержки должны быть вклю- чены фазовращатели, обеспечивающие синфазное суммирова- ние сигналов.
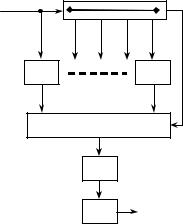
Соответствующая структурная схема представлена на ри- сунке 3.23. На схеме ФВ - фазовращатели, СФ - фильтр, согласо- ванный с парциальным импульсом ФКМ сигнала.
x(t) |
|
ФВ |
ФВ |
|
å |
|
CФ |
|
ПУ |
Рисунок 3.23. Оптимальный обнаружитель ФКМ сигнала
Рассмотрим пример. Пусть ФКМ сигнал состоит из трех парциальных импульсов с начальными фазами 0, 0, π (см. ри- сунок 3.24а). Схема оптимального обнаружителя такого сигна-

103
ла представлена на рисунке 3.24б, а эпюры напряжений в ха- рактерных точках схемы - на рисунке 3.25.
|
s(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
0 |
0 |
π |
b = 3 . |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
s(t) |
τ1 |
τ1 |
|
|
|
|
|
|
|
|
||
б) |
|
ϕ = π |
|
ϕ = π |
|
|
|
|
2 |
3 |
4 |
5 |
|
|
|
|
å |
|||
|
|
|
|
|
CФ |
Рисунок 3.24. ФКМ сигнал и схема его оптимального обнаружителя
1
0 0 π
2
π  π
π  0
0
3
|
|
|
|
|
|
π |
π |
0 |
|
|
|
|
|
|
|
|
|
|
|
4
5














τ1
С = 1,5
1
τ
Рисунок 3.25. Эпюры напряжения в схеме, представленной на рисунке
3.24
На эпюрах 1-3 показаны начальные фазы сигналов, на эпюре 5 - огибающая сигнала на выходе согласованного фильт- ра. Нетрудно видеть, что длительность выходного импульса по уровню 0,5 от амплитуды равна τ1 , то есть входной сигнал дли- тельностью 3τ1 сжат в b = 3 раза.

104
3.8. Расчёт коэффициента различимости
Коэффициент различимости - отношение минимально приемлемого сигнала к шуму по мощности на входе приемника, входит в основное уравнение радиолокации. Но характеристи- ки обнаружения зависят не от мощности, а от энергии сигнала:
|
æ |
|
ö |
|
D = |
2E |
. Покажем, как по ним найти коэффициент |
||
f ç q = |
÷ |
|||
|
è |
N0 ø |
|
|
различимости.
Предположим, что имеются характеристики обнаружения, соответствующие принятой модели сигнала типа, представлен- ных на рисунке 3.12. Задаваясь вероятностями правильного об- наружения D и ложной тревоги можно по ним найти требуе- мое значение параметра обнаружения q . Далее используем, что
kP = |
PC.MIN |
; E = N × E1 , |
|
||
|
PШ |
|
где N - количество импульсов в пачке, E1 - энергия одиночного импульса,
N0 = PDШf
и получаем: |
|
|
|
q2 = |
2E = 2PC.MIN ×τИ ×Df × N . |
||
Откуда |
N0 |
PШ |
|
|
|
|
|
|
kP = q2 |
1 |
|
|
2Df ×τИ N . |
||
|
|
||

105
4. ВЛИЯНИЕ ЗЕМЛИ И АТМОСФЕРЫ НА ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
4.1. Влияние рефракции радиоволн в тропосфере на дальность действия РТС
В этом разделе рассматривается влияние Земли и тропосферы на дальность действия РТС, работающих в метровом и более коротковолновых диапазонах. На этих волнах дифракция на по- верхности Земли не оказывает существенного влияния на даль- ность распространения. Поэтому дальность действия РТС не
превышает дальности прямой радиовидимости RПВ, RMAX ≤ RПВ .
Дальность прямой радиовидимости ограничивается кривизной земной поверхности. Её нетрудно рассчитать из геометричес- ких соотношений, считая Землю сферой с радиусом RЗ=6370 км.
Получится
RПВ = 3,57( |
|
+ |
|
) , |
|
h1 |
h2 |
(4.1) |
|||
где дальность R в километрах, высоты hi |
в метрах (см. рису- |
||||
нок 4.1). Формула получена без учета рефракции радиоволн в тропосфере.
Рефракция - искривление траектории распространения ра- диоволн в неоднородной среде. Причиной возникновения реф- ракции в тропосфере в вертикальной плоскости является изме- нение с высотой температуры, давления и влажности воздуха и, как следствие, его коэффициента преломления.
Тропосферой называют нижние слои атмосферы, где со- средоточена основная часть воздуха и водяного пара, образу- ются облака и турбулентные потоки, выпадают осадки.
Все это влияет на распространение радиоволн, особенно миллиметрового, сантиметрового и дециметрового диапазонов. Тропосфера простирается по высоте до 8-10 км в полярных рай- онах и до 16-18 км в тропических широтах земного шара.

106
Рисунок 4.1. Рефракция радиоволн в тропосфере |
|
||||||
Имеет место соотношение |
|
|
|
||||
(n -1)×10 |
6 |
= |
77,6 |
æ |
4810×e ö |
(4.2) |
|
|
T |
ç p + |
T |
÷ |
|||
|
|
|
è |
ø |
|
||
где n - коэффициент преломления; p - давление воздуха [мБар];
e- влажность [мБар] (парциальное давление пара);
Т- температура в градусах Кельвина.
Отклонения коэффициента преломления от единицы не- велики, и обычно измеряются в N-единицах,
N= (n -1)×106 .
Уповерхности Земли N=200-400.
При нормальной рефракции волна распространяется над Землёй, как бы "прижимаясь" к ней. Для расчета влияния реф- ракции вводится понятие эквивалентного радиуса Земли.
1 = 1 + dn RЗ.Э RЗ dh ,
dn
где dh - градиент показателя преломления.
При нормальной рефракции

107
dndh = -4×10−8 м−1
В расчетной формуле для дальности прямой радиовиди- мости при нормальной рефракции коэффициент 3,57 заменяет-
ся на 4,12. |
|
RПВ = 4,12( h1 + h2 ) |
(4.3) |
Однако метеоусловия могут сложиться так, что волна бо- лее сильно отклоняется к Земле, чем при нормальной рефрак- ции. Эта ситуация называется сверхрефракцией и приводит к
увеличению дальности действия радиосистем от десятков до тысячи километров и более. В литературе описаны случаи на- блюдения радиолокационной станцией, расположенной в Ан-
глии, судов, находящихся в Индийском океане. |
dn |
= - 1 |
|
|||
|
Могут сложиться метеоусловия, когда |
|
||||
( dn |
dh |
|
RЗ |
|
||
= -1,57×10−7 м−1 ). Это значит R |
|
|
||||
® ¥ , волна огибает |
||||||
dh |
З.Э. |
|
|
|
|
|
|
|
|
|
|
|
|
Землю. Это явление трактуется как тропосферный волновод.
Вероятность возникновения тропосферных волноводов над морской поверхностью больше, чем над сушей.
С другой стороны наблюдаются случаи, когда отклонение волны к Земле меньше, чем при нормальной рефракции. Эта
ситуация называется субрефракцией и приводит к сокращению дальности действия радиосистем. Прогноз дальности действия
радиосистем по метеоданным имеет важное значение в ряде практических случаев, например, в их военном применении.
4.2. Влияние Земли на дальность действия РТС
При расчете дальности действия РТС в общем случае надо учитывать влияние сферичности Земли и отражений радиоволн от её поверхности. Влияние сферичности Земли зависит от реф-
ракции радиоволн в тропосфере и рассмотрено в предыдущем подразделе. В данном подразделе учтем влияние отражений ра- диоволн от земной поверхности. Для упрощения расчетов бу-

108
дем считать Землю плоской, что допустимо, если расчетная даль- ность действия значительно ниже дальности прямой радиови-
димости, RMAX = RПВ . Кроме того, для конкретности, будем рас-
сматривать влияние отражений от Земли на дальность действия радиолокационных станций. Как подход, так и результаты рас-
четов качественно не изменяются при рассмотрении систем иного типа.
На рисунке 4.2 схематически показана антенна радиоло- катора, поднятая на высоту h над плоской земной поверхнос- тью. Сигнал, отраженный от цели, приходит на антенну двумя путями: прямо и отразившись от земной поверхности. Счита- ется, что антенна имеет симметричную в вертикальной плос-
кости диаграммунаправленности F (β ) , ось которой параллель-
на поверхности Земли. Считается также, что дальность до цели значительно больше высоты подъема антенны h и выполняют- ся законы геометрической оптики. При этих предположениях
прямой и отраженный сигналы приходят к антенне под одним и тем же углом β относительно её оси.
Рисунок 4.2. Антенна РЛС над плоской земной поверхностью
Сигнал в точке приема является суммой прямого и отра- женного, eΣ = eПРЯМ + eОТР .
eПРЯМ (t) = EПРЯМ F (β )cos(ω0t) ,
где F (β ) - диаграмма направленности антенны в вертикаль-

109
ной плоскости по напряженности поля.
eОТР (t) = p × EПРЯМ F (β )cos(ω0t +ϕPX +ϕОТР ),
где p ≤ 1 - модуль коэффициента отражения радиоволн от зем- ной поверхности,
ϕОТР - фаза коэффициента отражения,
ϕPX - фазовый сдвиг отраженного сигнала по отношению
кпрямому за счет разности хода.
Представим суммарный сигнал в виде
eΣ = EΣ cos(ω0t +ϕΣ ) ;
его амплитуду определим по теореме косинусов:
EΣ = F (β )
 EПРЯМ 2 + EОТР2 + 2EПРЯМ EОТР cos(φРХ +φОТР )
EПРЯМ 2 + EОТР2 + 2EПРЯМ EОТР cos(φРХ +φОТР )
или
EΣ = EПРЯМ F (β )
 1+ p2 + 2 p cos(Dϕ ) = EПРЯМ F (β )F .
1+ p2 + 2 p cos(Dϕ ) = EПРЯМ F (β )F .
Коэффициент F = 
 1+ p2 + 2 p cos(Dϕ ) называется ин-
1+ p2 + 2 p cos(Dϕ ) называется ин-
терференционным множителем.
Используем далее основное уравнение радиолокации, ко-
торое запишем в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RMAX .0 = 4 |
P |
G |
И |
2λ2σ |
ЭФФ |
|
|
|
ПЕР |
|
|
, |
|||||
PПР.MIN (4π )3 |
||||||||
где RMAX .0 - дальность действия в свободном пространстве.
Отсюда нетрудно получить расчётную формулу для даль-
ности действия с учётом отражений от Земли
RMAX = RMAX .0 F (β ) F |
(4.4) |
Если угол места цели b мал, то можно считать что р = 1, а ϕОТР= p. Тогда независимо от вида подстилающей поверхнос- ти, длины волны и вида поляризации поля
|
|
|
|
|
ϕРХ |
|
|
|
F = |
|
= |
|
= 2 |
sin |
|
|
|
|
2(1− cos(ϕPX )) |
|
|
|||||
1+1+ 2cos(ϕPX +ϕОТР ) |
|
. (4.5) |
||||||
|
|
|
|
|
|
2 |
|
|

|
|
|
|
|
110 |
|
|
|
|
Разность хода прямого и отраженного лучей найдем из |
|||||||||
рисунка 4.2. Получим |
|
R = 2hsin β . Откуда |
|
||||||
ϕPX |
= |
2π |
|
2hsin β . |
|
|
|
|
|
λ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
Используя далее формулы (4.4), (4.5), получаем |
|
||||||||
R = F(β ) |
|
2sin æ |
2π h sin β |
ö |
|
R |
(4.6) |
||
|
|
||||||||
MAX |
|
ç |
λ |
÷ |
|
MAX .0 . |
|||
|
|
è |
ø |
|
|
|
|||
Зависимость дальности действия от угла места цели на- зывается диаграммой видимости РЛС. В полярных координа- тах она имеет вид, представленный на рисунке 4.3. В максиму- мах парциальных лепестков дальность увеличивается вдвое, но при некоторых углах места она равна нулю. В частности она равна нулю под нулевым углом места, что создает известную проблему радиолокации низколетящих целей.
Рисунок 4.3. Диаграмма видимости РЛС при p = 1
Найдем положения максимумов парциальных лепестков диаграммы видимости.
Из формулы (4.6) следует, что они имеют место, когда
2πλh sin β = π (n - 0,5), n =1,2,3....
Отсюда следует, что максимум n-ого лепестка находится
из соотношения