

Радиотехнические системы
..pdf
|
11 |
УПЧ |
усилитель промежуточной частоты; |
УУН |
устройство устранения неоднозначности; |
Ффазометр;
ФВ |
фазовращатель; |
ФГ |
фазируемый гетеродин; |
ФД |
фазовый детектор; |
ФИ |
формирователь импульсов; |
ФКМ |
фазо-кодовая манипуляция; |
ФНЧ |
фильтр низких частот; |
ФО |
формирователь отметки; |
ФС |
формирователь строба; |
ФФфазовый фронт;
ЦАП |
цифро-аналоговый преобразователь; |
ЧМ |
частотная модуляция; |
ЧПК |
череспериодная компенсация; |
ЭПР |
эффективная поверхность рассеяния; |
12
1.ПРИНЦИПИАЛЬНЫЕ ОСНОВЫТЕОРИИ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
1.1. Понятие о радиосистеме. Виды радиосистем
Единая система конструкторской документации - свод до- кументов, которыми инженеры руководствуются при проекти- ровании - определяет систему как совокупность изделий, со- единенных между собой при эксплуатации механической, элек- трической, оптической или другой связью, имеющую самостоя- тельное эксплуатационное значение. Например, телевизор с от- дельным антенным устройством представляет собой систему, позволяющую просматривать телевизионные передачи.
В жизни мы окружены различными системами: электрон- ная вычислительная машина - система, автоматическая теле- фонная станция - система, существуют системы слепой посад- ки самолетов, системы управления технологическими произ- водственными процессами, системы противовоздушной обо- роны и т.д. Одни системы входят в другие как составные части подсистемы. В упомянутом примере телевизор с антенной яв- ляются подсистемой более крупной системы, в которую входит передающий телевизионный центр, а получившаяся система в свою очередь является частью еще более крупной, в которую входит космическая система связи и т.д. Системы оказываются очень сложными и дорогими. Поэтому очень важно, чтобы они были оптимальными, то есть обладали наилучшими характе- ристиками в заданных условиях эксплуатации. Однако обычно к системам предъявляется целый ряд технических требований, и некоторые из них являются противоречивыми. Например,
противоречивыми являются требования увеличения дальности действия и уменьшения веса радиопередающего устройства. Воз- никает проблема выбора критериев оптимальности системы. Общих рецептов отыскания критериев оптимальности не су- ществует. Обычно это отношение некоторого обобщенного по- казателя качества работы системы к стоимости затрат (эконо- мических, энергетических, временных и т.д.).
13
В пятидесятые годы прошлого столетия возникла отрасль науки, получившая название системотехники, охватывающая вопросы оптимизации систем [1].
«Системный подход» к проектированию требует четкой формулировки цели функционирования системы и последова-
тельного разукрупнения этой цели при условии оптимизации системы на каждом последовательном шаге. При таком подходе выделяются принципиальные вопросы создания системы, а детали отходят на второй план.
Радиотехническими называют такие системы, в которых переносчиком информации являются радиоволны. Радиотехни- ческие системы можно разделить на следующие классы:
-системы передачи информации;
-радиолокационные системы;
-радионавигационные системы;
-радиоастрономические системы.
Класс систем передачи информации очень широк. Сюда относятся радиовещание и телевидение, многоканальная циф- ровая и аналоговая радиосвязь, системы передачи команд, сис- темы телеметрии и т.д. В данной книге системы передачи ин- формации не рассматриваются, им посвящено отдельное изда- ние.
Радиолокация - область науки и техники, охватывающая методы и средства обнаружения, определения координат и па- раметров движения различных объектов.
Слово радиолокация происходит от двух английских слов: radio - не требует перевода, и to locate - определять местополо- жение, локализовать. Соответствующую установку по английс-
ки называют Radar - сокращение от Radio Detection and Ranging
(обнаружение и измерение дальности). По-русски говорят «ра- диолокационная станция» (РЛС) или «радиолокатор». Радио- локация возникла в середине тридцатых годов прошлого сто- летия как область военной техники. Это было время бурного развития авиации, и радиолокационные средства разрабаты- вались для обнаружения вражеских самолетов на дальних под-
14
ступах к объектам нанесения удара. Радиолокация и сейчас иг- рает ключевую роль в вооружении армий развитых государств. На неё возлагаются функции обнаружения наземных, надвод- ных воздушных и космических целей, определения их коорди- нат, параметров движения, а также управление оружием. Но в современном мире задачи, решаемые с помощью радиолокации, не сводятся только к военному делу. Упомянем управление воз- душным движением, управление дорожным движением, гид- рометеорологию, выполнение космических программ и т.д. Объекты радиолокационного наблюдения принято называть ра- диолокационными целями или просто целями.
Воснове слова радионавигация лежит английское слово Navy - флот. Ещё 100 лет назад навигацией называли науку о вождении морских судов. Основными средствами навигации служили компас и астрономические приборы. Сегодня навига- ция - наука о способах и средствах вождения надводных, под- водных, воздушных и космических судов, наземных транспорт- ных средств. Традиционные средства навигации уступили ме- сто радиотехническим, основанным на использовании источ- ников радиоизлучения, расположенных на поверхности земли или на искусственных спутниках земли. Радионавигационные средства не зависят от погоды, более точны, удобны и опера- тивны, чем традиционные.
Радиоастрономия - астрономия в радиодиапазоне [2]. Ра-
диоастрономические системы предназначены для исследования Вселенной по существующим в ней радиоизлучениям.
Наблюдения на максимально далеких расстояниях суще- ственны для понимания возникновения и характера той Все- ленной, в которой мы живем, а эти знания в свою очередь дают ключ к пониманию её конечной судьбы.
Внекоторых источниках выделяют ещё один класс сис- тем - системы радиоуправления. Управлять по радио можно разнообразными объектами, но под этим термином обычно по-
нимают управление беспилотными летательными аппаратами
[3].При всей сложности комплексов радиоуправления они со-
15
стоят из систем передачи информации, радиолокационных и радионавигационных систем. Поэтому в учебном курсе мы не будем выделять их как отдельный объект для изучения.
Перечисленные радиосистемы имеют много общего как в алгоритмах обработки сигналов, так и в схемах построения ап- паратуры. В настоящем курсе мы будем изучать радиолокаци- онные и радионавигационные системы, имея в виду, что полу- ченные знания могут быть основой для изучения и проектиро- вания радиотехнических систем иных классов.
Особенностью курса является то, что радиотехнические системы рассматриваются в нем на уровне принципов постро- ения, структурных и функциональных схем. Принципиальные электрические схемы рассматриваются в тех редких случаях, когда без этого невозможно пояснить принцип функциониро- вания системы. Предполагается, что студенты освоили пред- шествующие дисциплины, раскрывающие содержание элемен- тов функциональных схем. Такими дисциплинами являются «Радиотехнические цепи и сигналы», «Антенны и техника СВЧ», «Радиоприемные устройства», «Радиопередающие устройства», «Цифровая обработка сигналов».
Принципиальные ограничения в качестве работы радио- систем создают помехи естественного и искусственного про- исхождения. В связи с этим входные воздействия на радиопри- емные устройства систем (совокупность сигналов и помех) счи- таются случайными процессами. Их представление и преобра-
зования в электрических цепях могут быть описаны только с помощью математического аппарата статистической радиотех- ники. Мы предполагаем, что студенты овладели этим аппара- том, изучив дисциплины «Теория вероятностей и математичес- кая статистика», «Статистическая теория радиотехнических си- стем».
Учебника по радиотехническим системам, соответствую- щего по содержанию утвержденному образовательному стан- дарту, на сегодня не существует. В качестве основной литерату- ры мы рекомендуем книги [4-7], содержащие в совокупности

16
всё, что надо знать по дисциплине и гораздо более того. До- полнительная литература будет указана по ходу изложения ма- териала.
1.2. Физические основы радиотехнических методов обнаружения объектов, определения их координат и скорости
Радиотехнические средства позволяют обнаруживать объекты, измерять расстояние до них (дальность), их угловые координаты и радиальную скорость.
Обнаружение объектов (целей) - задача радиолокации. В
основе радиолокационного обнаружения лежит способность радиоволн отражаться от контраста проводимости, либо коэф- фициента преломления среды. Последний определяется фор-
мулой
n = 
 εμ ,
εμ ,
где ε - диэлектрическая проницаемость среды, μ - магнит- ная проницаемость среды.
Обнаружение целей производится путем фиксации факта отражения - приема отраженных сигналов.
Измерение дальности до цели R базируется на постоян- стве скорости распространения электромагнитной волны в ат- мосфере, которая считается известной. В радиолокационных си- стемах сигнал проходит путь «РЛС - цель» дважды (туда и об- ратно), так что
R = cτ2з ,
где c - скорость распространения электромагнитной волны,
τз - задержка принимаемого сигнала относительно излу- ченного.
Скорость распространения электромагнитных волн в сво-
17
бодном пространстве (вакууме)
с = с0 = 299793км / с : 3×105 км / с.
Скорость распространения радиоволн в атмосфере
с = с0 / n, |
(1.1) |
где n - коэффициент преломления.
В тропосфере коэффициент преломления n зависит от температуры, давления и влажности. У поверхности земли (n -1) ×106 = 200 ¸ 400 в зависимости от времени, места и по- годы. Разброс n определяет предельную точность измерения дальности:
DRR = Dcc »10−4 .
Измерение угловых координат основано на том, что в од- нородной среде фазовый фронт волны (поверхность равных фаз) - сфера. Нормаль к фазовому фронту("угол прихода волны") и есть направление на источник излучения. При большом уда-
лении от источника излучения фазовый фронт обычно считают плоским. Определение направления на источник излучения на- зывают пеленгованием, а соответствующее устройство - пелен- гатором.
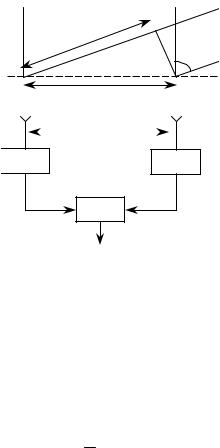
Существуют два метода измерения угловых координат: ам- плитудный и фазовый. В амплитудном методе используется на- правленность антенн: максимум приема апертурной антенны имеет место, когда плоскость ее раскрыва параллельна фазово- му фронту волны. Фазовый метод основан на измерении раз- ности фаз сигналов, принятых на разнесенные в пространстве антенны. Укрупненная структурная схема фазового пеленгато- ра представлена на рисунке 1.1. Допустим, на антенную систе- му пеленгатора падает плоская волна под углом α относитель- но нормали к ней, как показано на рисунке 1.1.
18
l
α
A1 |
l |
A2 |
|
||
|
|
|
Пр. Пр.
Φ
ϕ
Рисунок 1.1. Укрупненная структурная схема фазового пеленгатора
Разность хода сигналов на антенны A1 и A2
Dl = l ×sinα ,
где l - расстояние между фазовыми центрами антенн пеленгатора).
Разности хода Dl соответствует разность фаз
ϕ = 2π λl sinα ,
откуда следует формула для расчета угла прихода α
æ |
ϕλ ö |
|
α = arcsin ç |
|
÷ . |
|
||
è |
2π ×l ø |
|
(база
(1.2)
(1.3)
Измерение радиальной скорости базируется на эффекте Доплера.
Эффект Доплера используется как для определения скоро- сти радиолокационных целей относительно места расположе- ния радиолокатора по отраженному сигналу, так и для опреде-

19
ления скорости движущихся объектов относительно неподвиж- ных удаленных точек. Этот случай типичен для радионавига- ции.
Рассмотрим первый случай. Пусть
uИ (t) = UИ cos(ω0t) - излучаемый сигнал,
uПР (t) =UПР cos(ω0t -ω0 2cR) - принимаемый сигнал,
ψ (t) = ω0t -ω0 2cR - его полная фаза,
R - расстояние до цели.
Частота сигнала - производная от его полной фазы по вре- мени,
ω = ddtψ ,
откуда получаем
|
|
|
ω = |
dψ |
= ω0 -ω0 |
2vR |
, |
|
|
|
dt |
|
|||
|
|
|
|
|
c |
||
где |
vR |
= dR |
- радиальная скорость цели. |
||||
|
|
dt |
|
|
|
|
|
Величина ωД = ω0 × 2cvR называется доплеровским смеще-
нием частоты. Измеряя его, можно затем вычислить радиаль- ную скорость цели.
Очевидно, доплеровское смещение частоты сигнала, из- лучаемого движущимся объектом, в неподвижной точке опре-
деляется формулой
|
|
20 |
|
|
|
|
ω |
Д |
= ω |
× |
vR |
. |
(1.4) |
|
||||||
|
0 |
|
c |
|
||
где vR - радиальная скорость объекта относительно измери-
тельного пункта.
1.3. Радиотехнические методы определения местоположения объектов
Положение объекта в пространстве определяется тремя координатами xi (i = 1,2,3) в той или иной системе координат.
Положение объекта на поверхности земли задается двумя коор- динатами. Методы определения местоположения делятся на следующие группы:
обзорно-сравнительные; методы счисления пути; методы позиционных линий.
Обзорно-сравнительные методы основаны на сравнении наблюдаемой карты местности с эталонной, внесенной в па- мять системы. На наблюдаемой карте нанесено положение объек- та. Совмещение эталонной карты с наблюдаемой позволяет определить его координаты.
Используемые карты могут иметь различную физическую природу. Это может быть изображение земной поверхности в оптическом или радиолокационном диапазоне, карта звездно- го неба в оптическом или радиодиапазоне, карта радиотепло- вого излучения земной поверхности и т.д.
Совмещение карт обычно производится путем нахожде- ния их взаимной корреляционной функции. Для двумерных карт
B(Dx,Dy) = òòs(x, y) ×s(x0 + Dx, y0 + Dy)dxdy, |
(1.5) |
где B( x, y) - взаимная корреляционная функция (ВКФ), s(x, y) - наблюдаемое изображение,
s(x0 + Dx, y0 + Dy) - эталонное изображение,