Введение
Физика по-гречески «природа». Физика изучает свойства окружающего нас мира, строение и свойства материи, законы взаимодействия и движения материальных тел. Физика – наука о наиболее простых и общих свойствах материи. Она является фундаментом многих естественных наук и техники. В частности, физика является основой химии, так как она объясняет природу периодических свойств химических элементов и механизм возникновения междуатомных сил.
Современная теория электромагнетизма является основой развития промышленной электротехники и радиотехники. Из открытий в области физики атомного ядра возникла ядерная энергетика. Развитие техники и промышленности требуют от физиков разрешения ряда проблем, тесно связанных с дальнейшим техническим прогрессом, дает физике новые, более современные приборы и методы исследования.
При изучении курса физики закладываются основы для изучения общетехнических и специальных дисциплин. Знание физики необходимо для правильного диалектического материалистического представления о явлениях природы.
Физику подразделяют на классическую и квантовую. Начало классической физики было положено Ньютоном, сформулировавшим основные законы механики. Завершено развитие классической механики созданием в 1905 году Эйнштейном специальной теории относительности и релятивистской механики, учитывающей требования этой теории.
Начало квантовой физики было положено в 1900 году М. Планком.
Механика изучает простейшую форму движения – перемещение материальных тел, т.е. изменения их взаимного положения с течением времени. Механика подразделяется на: механику материальной точки, механику твердого тела и механику сплошной среды.
Материальной точкой называют тело, размерами которого можно пренебречь, по сравнению с расстоянием до других тел.
Под твердым телом подразумевают абсолютно твердое тело, т.е. тело, деформациями которого можно пренебречь в условиях данной задачи.
Механика сплошной среды изучает движение и равновесие газов, жидкостей и деформируемых тел. Одним из разделов механики сплошных сред является гидродинамика.
Механика подразделяется на классическую и квантовую. Классическая механика подразделяется на ньютоновскую и релятивистскую. В основе ньютоновской механики лежат законы Ньютона. Эта механика справедлива для макроскопических тел, движущихся со скоростями, малыми по сравнению со скоростью света.
Релятивистской механикой называется механика, учитывающая требования специальной теории относительности. Она справедлива и при скоростях, сравнимых со скоростью света.
Механику подразделяют на кинематику, статику и динамику. Кинематика описывает движение тел, не интересуясь причинами, обуславливающими это движение. Статика рассматривает условия равновесия тел. Динамика изучает движение тел в связи с теми причинами, которые обусловливают тот или иной характер движения.
Движение тел происходит в пространстве и во времени (пространство и время – неотъемлемые формы существования материи). Ньютон считал пространство и время абсолютными, не зависящими друг от друга и от присутствующих в пространстве тел. Согласно теории относительности пространство и время неразрывно связаны друг с другом, образуя единое четырехмерное пространство-время. Из общей теории относительности следует, что присутствие тяготеющих масс искривляет пространство и оказывает влияние на время.
Э
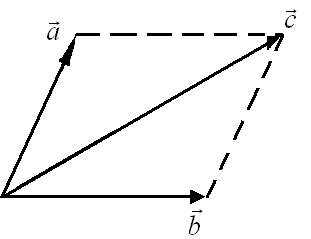
Рис. 1.1
лементы векторной алгебры и векторного анализа. Векторы – величины, характеризующиеся численным значением, направлением и складывающиеся по правилу параллелограмма (рис. 1.1).
Практически сложение векторов удобно производить без построения параллелограмма. Начало второго вектора совмещают с концом первого, начало третьего – с концом второго и т.д. Из начала первого вектора в конец последнего проводят результирующий вектор (рис. 1.2).
|
|
|
|
|
|
||
|
|
||
Рис. 1.2 |
|||
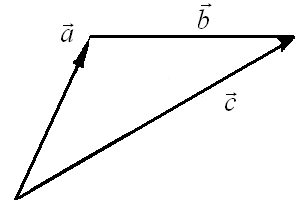
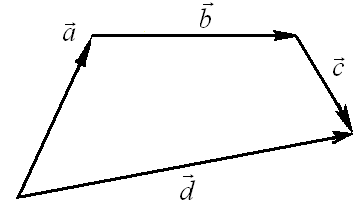
Рис. 1.3![]()
![]() и
и
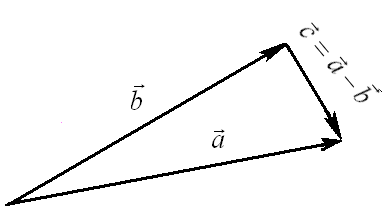
![]() называется
такой вектор
называется
такой вектор
![]() ,
который в сумме с вектором
даёт
вектор
(рис. 1.3).
,
который в сумме с вектором
даёт
вектор
(рис. 1.3).
Умножение вектора на скаляр
В
результате умножения вектора
на скаляр
![]() получается новый вектор
=
,
модуль которого в
получается новый вектор
=
,
модуль которого в
![]() раз отличается от модуля вектора
.
Направление
совпадает с направлением
,
если
>0,
либо противоположно
,
если
<0.
раз отличается от модуля вектора
.
Направление
совпадает с направлением
,
если
>0,
либо противоположно
,
если
<0.
Рис. 1.4
![]() ,
где
,
где
![]() – модуль вектора, а
– модуль вектора, а
![]() –
вектор, называемый единичным вектором,
или ортом, вектора
.
–
вектор, называемый единичным вектором,
или ортом, вектора
.
Проекция вектора.
Пусть вектор
образует с осью
![]() угол
угол
![]() (рис. 1.4). Величина
(рис. 1.4). Величина
![]() называется проекцией вектора
на ось
называется проекцией вектора
на ось
![]() .
Индекс указывает направление, на которое
спроектирован вектор. (Например, на ось
Х:
.
Индекс указывает направление, на которое
спроектирован вектор. (Например, на ось
Х:
![]() и
т.п.).
и
т.п.).
Любой вектор можно выразить через его проекции на координатные оси (компоненты) и орты осей:

Р
Рис. 1.5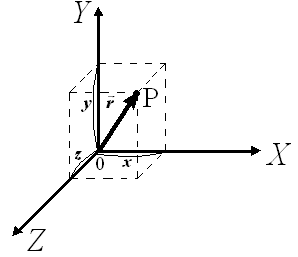 адиус-вектор.
Радиусом-вектором некоторой точки Р
называется вектор, проведённый из начала
координат в данную точку (рис. 1.5).
Радиус-вектор можно представить:
адиус-вектор.
Радиусом-вектором некоторой точки Р
называется вектор, проведённый из начала
координат в данную точку (рис. 1.5).
Радиус-вектор можно представить:
![]() ,
,
где
проекции
![]() на ось координат равны декартовым
координатам точки,
на ось координат равны декартовым
координатам точки,
![]() – орты осей X,
Y,
Z.
– орты осей X,
Y,
Z.
Модуль радиус-вектора, как видно из рис. 1.5, равен:
(Аналогично,
через компоненты можно найти модули
любого вектора
![]() ).
).
Умножение векторов. Скалярное произведение векторов – это скаляр, равный произведению модулей этих векторов на косинус угла между ними:
Скалярное произведение можно выразить через компоненты векторов:
Скалярное произведение коммутативно:
![]()
Векторное произведение. Векторным произведением векторов и называется вектор , определяемый формулой:
где
– угол между векторами
и
,
![]() – единичный вектор нормали к плоскости,
в которой лежат вектора
и
(рис. 1.6).
– единичный вектор нормали к плоскости,
в которой лежат вектора
и
(рис. 1.6).
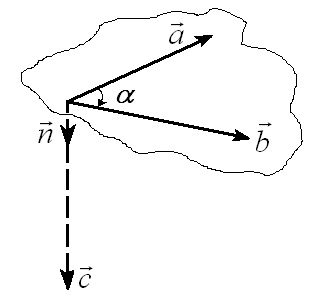
Рис. 1.6
(Примечание: направление вектора совпадает с направлением поступательного движения правого винта, если вращать вектор по направлению к вектору – правило правого винта).
Векторное произведение можно рассчитать с помощью определителя:
Векторное произведение некоммутативно: