

2906
.pdfтелом АВС. При этом, вследствие малости удлинений по сравнении с длинами стержней, используются следующие допущения:
I) ориентация оси любого стержня в процессе деформирования системы не изменяется;
2) если жесткое тело в соответствии с наложенными связями может совершать вращательное движение, дуги окружностей, по которым перемещается его точки,
заменяет отрезками касательных к этим окружностям.
Эти допущения в большинстве случаев практически очень точно выполняются.
Рассмотрим составление уравнений совместности перемещений на нескольких примерах.
На рис. 1.19, а-1.22, а, представлены стержневые системы, а на рис. 1.19, б – 1.22, б представлены схемы деформирования этих систем с учетом принятых допущений. На этих схемах цифрами без штрихов помечены части стержней, недеформированной системы, а цифрами со штрихами помеченные те же части стержней деформированной системы.
Случай 1.
Система, изображенная на рис. 1.18, а один раз статически неопределима ( l = 1). Вследствие симметрии шарнир А пере-
мещается по вертикали, и удлинение l1 |
l2 . Из схемы де- |
||
формирования (см. рис.1.19, б) следует AA |
A B1 / cos , |
||
AA |
l3 , поскольку стержень 3 укоротился A B1 |
l2 . |
|
Уравнение совместности перемещений принимает вид |
|
||
l3 |
l2 cos . |
|
|
|
Рис. 1.20 |
Случай 2. |
|
Система (рис. 1.20,
145
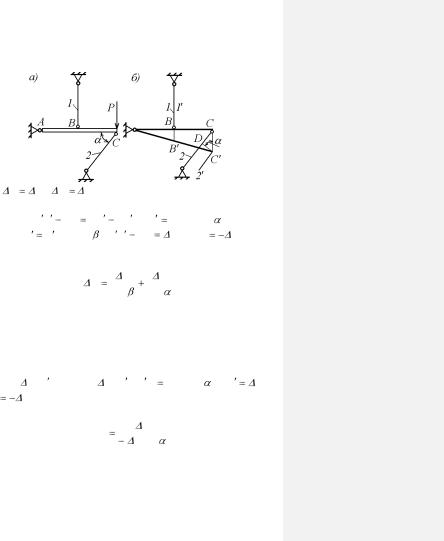
а) один раз статически неопределима ( l = 1). Вследствие симметрии шарниры А и В перемещаются по вертикали и удлине-
ния l1 |
l2 , l4 |
l5 . Из схемы деформирования (см. рис. |
||||
1.20, б) следует |
|
|
|
|
|
|
|
A B AB |
BB |
AA , |
AA |
AC1 / cos |
, |
BB |
B D1 / cos , |
A B |
AB |
l3 , AC1 |
l1 , |
|
поскольку первый стержень укоротился.
Уравнение совместности перемещений имеет вид
l |
3 |
l4 |
|
l1 |
. |
|
|
||||
|
cos |
|
cos |
||
|
|
|
|||
Случай 3.
Система (рис. 1.21, а) один раз статически неопределимая ( l =1). Точка А абсолютно твердого тела остается неподвижной, поэтом тело совершает в процессе деформирования вращательное движение. На схеме деформирования (см. рис. 1.21, б) АС и AC - начальное и возможное положения этого тела.
- начальное и возможное положения этого тела.
Так как |
BAB подобен CAC , C C CD / sin , BB |
l1 , |
||||
CD |
l2 , поскольку стержень 2 укоротился. |
|
||||
Уравнение совместности перемещений имеет вид: |
|
|||||
|
|
AB |
|
l1 |
. |
|
|
|
AC |
|
l2 sin |
|
|
|
|
|
|
|
||
Случай 4.
Система (рис. 1.22, а) один раз статически неопределима ( l = 1). В процессе деформирования точка О абсолютного
146
Рис. 1.21
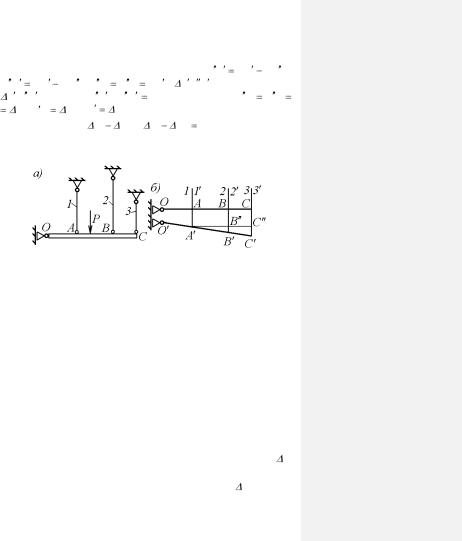
твердого тела ОС перемещается по вертикали и при этом тело может поворачиваться вокруг точки О (см. рис. 1.22, б). Из
указанной схемы деформирования следует: B B BB |
BB , |
||||
C C CC |
CC , C C |
B B |
AA , |
A B B подобен |
|
A C C , поэтому B B / C C |
AB / AC . Так как C C |
B B |
|||
l1 , B B |
l2 , CC |
l3 , уравнение совместности переме- |
|||
щений имеет вид ( l2 |
l1 ) /( |
l3 |
l1 ) AB / AC . |
|
|
Расчет статически неопределимых систем ведется в следующем порядке.
Рис. 1.22
l. Выбирают тело, равновесие которого нужно рассмотреть. Освобождают его от связей и нагружают активными силами и реакциями стержней, считая стержни pастянутыми. Классифицируют получившуюся систему сил и составляют уравнения равновесия.
2.Определяют степень статической неопределимости сис-
темы.
3.Рассматривая возможные перемещения, соответствующие наложенным связям составляют уравнения совместности перемещений характерных точек стержней и выражают перемещения шарниров стержней через удлинения стержней.
При этом принимают:
а.) если из схемы возможных перемещений следует, что какой либо стержень укоротился, то удлинение в уравнении перемещений берут со знаком минус;
6) если стержень К изготовлен с погрешностью длины K , то в уравнении совместности перемещений, составленном без учета погрешностей длин заменяют удлинение lK на
147
lK  K . При этом считают K > 0 если стержень длиннее проектного и K < 0 - если короче.
K . При этом считают K > 0 если стержень длиннее проектного и K < 0 - если короче.
4. Заменяют в уравнениях совместности перемещений удлинения нормальными силами по закону Гука, при этом длины стержней берут равными расчетным (проектным) длинам
lK |
( t N / EF )dz . |
lK
Частные случаи:
а) если в стержне реализуется однородное напряженное
состояние и t const |
tK , |
|
const |
K , то |
|
lK |
NK lK |
|
K tK lK ; |
||
|
|
||||
|
EK FK |
|
|
||
б) если температура не меняется, то |
tK 0 и |
||||
|
lK |
N K lK |
. |
|
|
|
EK FK |
|
|||
|
|
|
|
||
5. Решают совместно уравнения равновесия и уравнения совместности перемещений и получают значения нормальных сил в стержнях.
Пример 17. Определение монтажных напряжений в стержневой системе с твердым телом
Для системы, изображенной на рис. 1.18 раскрыть статическую неопределимость и определить нормальные силы в стержнях при условии, что длина стержня 2 отличается от проектной длины на величину .
|
|
|
|
Длина стержня 1 |
l |
( 2a )2 ( 1,5a )2 2,5a . |
|
|
1 |
|
|
Тригонометрические функции угла 
cos |
2a / l1 |
2a / 2,5a |
0,8 , |
sin |
1,5a / l1 |
1,5a / 2,5a |
0,6 . |
Раскрытие статической неопределимости проводится следуя ранее изложенной методике.
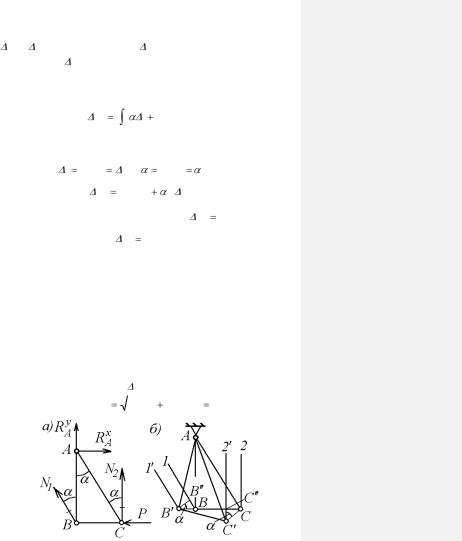
1. Стержни является связями для абсолютно твердого тела ABС (см. рис. 1.18, а), поэтому для определения N1 и N2
нужно рассмотреть равновесие этого тела (рис. 1.23, а). Для системы сил, произвольно расположенных на плоскости, мож-
Рис. 1.23
но составить 3 независимых уравнения равновесия, Так как нужно определить только N1 и N2 , выбираем уравнение равновесия, в которое не войдут реакции опоры А
M A( Pi ) 0 , N1 2a sin |
N2 1,5a P2a 0 , |
||
или |
|
|
|
1,2N1 |
1,5N2 |
2P |
0 . |
2. Число независимых уравнений равновесия 3, неизвестных реакций 4 ( N1 , N2 , RAx , RAy ), поэтому степень статиче-
ской неопределимости системы равна 1.
3. Тело ВСА закреплено неподвижно и точка А вследствие деформации стержней может совершать вращательное движение. На рис. 1.23, б представлена схема деформирования:
ВАС - положение тела до деформации; В'А'С' - положение тела после деформации. Угол поворота узлов В и С одинаков, так как тело АВС - абсолютно твердое. Пусть C и B перемеще-
ния узлов С и В. Тогда
C / |
B AC / AB 2,5a / 2a 1,25 . |
Выразим BB |
и CC через удлинения стержней. Как сле- |
дует из схемы деформирования (см. рис. 1.23, б) стержень 1
растянут, а стержень 2 сжат. Поэтому C C |
l2 , |
|
|||
C CC |
, C C CC sin |
C sin |
, |
B B |
l1 , |
B B B , BB BB sin |
B sin |
, |
|
||
|
149 |
|
|
|
|
|
C |
|
C C sin |
|
l1 |
1,25 . |
|
|
B |
|
BB |
sin |
|
l2 |
|
|
|
|
|
||||
4. В стержнях наблюдается однородное напряженное со- |
|||||||
стояние, поэтому |
|
|
|
|
|
|
|
l1 N1l1 /( E1F1 ) , |
l2 N2l2 /( E2 F2 ) . |
||||||
Поскольку E1 |
E2 |
E , F1 |
F , F2 2F , l1 2,5a , |
||||
l2 3a , после подстановки получим уравнение совместности перемещений в виде
1,25 |
l2 |
|
N2 3a |
|
EF |
0,6 |
N2 |
. |
l1 |
|
2EF |
|
N1 2,5a |
N1 |
|||
|
|
|
|
|
5. Решая совместно уравнения равновесия и совместности деформаций, получим
N1 0,48N2 , 1,2( |
0,48 )N2 1,5N2 |
2P , |
N2 2P / 2,075 0,963P , |
N1 0,48 0,963P |
0,462P . |
Знаки нормальных сил подтверждают, что стержень 1 сжат, а стержень 2 растянут.
Дальнейшие расчеты по определению площадей проводятся так же как и в других рассмотренных выше задачах.
Раскрытие статической неопределимости при наличии отклонений длин стержней от проектных длин проводится в соответствии с выше рассмотренной методикой.
1. Полагая Р= 0, освобождаем тело ВАС от связей. Пусть N1* и N*2 нормальные силы, возникающие в стержнях после сборки (рис. 1.23). Уравнение равновесия имеет вид
M |
A |
( P ) |
0 , N* |
1,5a |
N* 2a sin |
0 , 1,5N* |
1,2N* |
0 . |
|
i |
2 |
|
1 |
2 |
1 |
|
2.Поскольку l =1 система статически неопределима.
3.Так как длина стержня 1 отличается от проектной длины на , то в уравнение совместности перемещений, составленное для идеальных (точно изготовленных) стержней, необ-
ходимо заменить l1 |
на |
l1 |
K . Тогда уравнение совмест- |
|
ности перемещений примет вид |
|
|
||
( |
l1 |
) / |
l2 |
1,25 . |
|
|
150 |
|
|
Так как
l |
|
N*l /( E F ) N* 3a /( EF ) , |
|
|
|
|
|
|
||||||||||
1 |
1 1 |
1 |
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
l |
2 |
N*l |
2 |
/( E |
2 |
F |
) N* |
2,5a /( 2EF ) , |
|
|
|
|
|
|||||
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
получаем, |
l1 |
|
|
1,25 |
l2 |
, - |
N1* |
3a |
|
|
|
N*2 |
2,5a |
, |
|
|||
|
|
EF |
|
|
2EF |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
или 2N1* 3a |
|
N*2 2,5a |
2 |
EF . |
|
|
|
|
|
|
|
|
||||||
Решая совместно это уравнение с уравнением равновесия |
|
|||||||||||||||||
получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N*2 |
|
0,8 N1* , |
6 N1* |
|
2,5 0,8N1* |
2 EF / a , |
|
|||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4N1* |
|
2 |
EF / a , N1* |
0,5 |
EF / a . |
|
|
|||||||
|
Пример 18. Составление уравнения совместности |
|
||||||||||||||||
|
|
перемещений для ступенчатого стержня |
|
|
||||||||||||||
Составить уравнение совместности перемещений для сту- |
Отформатировано |
|||||||||||||||||
пенчатого стержня (рис. 1.2, а), рассмотренного в примере 1. |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
Решение |
|
|
|
|
|
|
||||
Для составления уравнения совместности перемещений |
|
|||||||||||||||||
стержня необходимо выразить нормальные силы на участках |
|
|||||||||||||||||
стержня через реакции в заделках. |
|
|
|
|
|
|
|
|
||||||||||
Методом сечений получаем: |
|
|
|
|
|
|
|
|
||||||||||
Участок 1. 0 |
Z1 |
a. Рассматриваем левую часть стержня. |
|
|||||||||||||||
Из рис. 1.2, е следует |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Piz |
0, RA |
N( z1 ) 0 . |
|
|
|
|||||||
Отсюда N( z1 ) |
RA . |
|
|
|
|
|
|
|
|
|
|
|
||||||
Участок 2. 0 |
Z2 |
2a. Рассматриваем правую часть стерж- |
|
|||||||||||||||
ня. Из рис. 1.2, ж следует |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
Piz |
0, 14qa |
4qz2 |
RB |
N( z2 ) |
0, |
|
|
|||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N( z1 ) |
14qa |
RB |
4qz2 . |
|
|
|
|||||||
Участок 3. 0 |
Z3 |
2a. Рассматриваем правую часть стерж- |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
151 |
|
|
|
|
|
|
|
|
|
ня. Из рис. 1.2, з следует
Piz 0 , N( z3 ) RB . |
|
Поскольку концы стержня заделаны в некоторое жесткое |
Отформатировано |
тело, при любых нагрузках, не разрушающих стержень, перемещения его концевых сечений друг относительно друга равны нулю. Поэтому удлинение всего стержня равно нулю. Поскольку стержень состоит из трех участков, его удлинение определится по формуле
l  l1
l1  l2
l2  l3 .
l3 .
На участках 1 и 3 нормальная сила и характеристики стержня постоянны. Поэтому удлинения этих участков определятся по формулам
l1 |
N1l1 |
|
RAa |
, |
l3 |
N3l3 |
|
RB 2a |
. |
EF1 |
|
3EF |
EF3 |
|
3EF |
||||
|
|
|
|
|
|
На участке 2 характеристики стержня постоянны, а нормальная сила и изменяется по линейному закону
N( z2 )  RB 14qa 4qz2 .
RB 14qa 4qz2 .
Поэтому удлинение этого участка определится по формуле
l2 |
|
N( z2 )dz2 |
|
|
1 |
|
|
( |
RB |
14qa |
4qz2 )dz2 |
||||||||||||||
|
|
|
|
EF2 |
|
|
|
|
EF2 l |
||||||||||||||||
|
l |
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
R |
z |
|
14qaz |
2qz2 |
2a |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
EF2 |
|
|
B |
|
|
|
|
2 |
|
|
|
2 0 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2a |
|
|
|
R |
|
14qa |
|
4qa |
|
|
2a |
( |
R |
|
10qa ) . |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
5EF |
|
|
B2 |
|
|
|
|
|
|
|
|
5EF |
|
|
B |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
RAa |
|
|
( 10qa RB ) 2a |
|
RB |
2a |
0 |
, |
||||||||||||
|
|
|
E 3F |
|
|
|
|
E 5F |
|
|
|
E 3F |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
5RA |
3( 10qa |
RB ) 2 |
5RB |
2 |
0 , |
|
|||||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5RA |
|
16RB |
60qa |
0 . |
|
|
|
|
|||||||||
Из уравнения равновесия стержня следует |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
RA |
6qa RB . |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
152 |
|
|
|
|
|
|
|
|
|
|
||
Подставляя это выражение в уравнение совместности пе- |
Отформатировано |
||
ремещений, получаем 5( 6qa RB ) |
16RB 60qa |
0 . |
|
Тогда |
|
|
|
RB 90qa / 21 30qa / 7 и RA |
6qa 30qa / 7 |
12qa / 7 . |
|
153
Глава 2. КРУЧЕНИЕ ПРЯМЫХ КРУГЛЫХ ВАЛОВ
§ 11. Теоретическая справка.
Крутящим моментом называется момент пары сил, расположенных в плоскости поперечного сечения, которым одна часть стержня действует на другую часть стержня.
Под кручением понимается такой вид нагружения, при котором в поперечных сечениях стержня возникает только крутящий момент. Стержень, нагруженный подобным образом, называют валом. Ниже рассматриваются только прямые валы. Моменты, вызывающие кручение стержня создаются парами сил, расположенных в плоскостях, перпендикулярных продольной оси вала.
Для определения крутящего момента в сечении вала используется метод сечений, для чего в нужном месте вал рассекается поперечным сечением, одна из частей вала с приложенными к ней нагрузками отбрасывается, ее действие на оставленную часть вала заменяется крутящим моментом, который определяется из уравнения равновесия оставленной части вала. Крутящий момент в поперечном сечении вала, нагруженного сосредоточенными моментами, определяется по формуле
n |
|
|
M к |
Mi , |
(2.1) |
i |
1 |
|
где M i - момент, приложенный по одну сторону от сечения;
n - количество моментов, расположенных по одну сторону от сечения.
При записи этого соотношения принято правило знаков, согласно которому крутящий момент в рассматриваемом сечении считается положительным, когда M i вращает рассматри-
ваемую часть вала против хода часовой стрелки, если смотреть в направлении, противоположном направлению внешней нормали к сечению.
Условие прочности при чистом кручении вала переменного сечения записывается в виде
154