

2906
.pdfПри определении температурных напряжений внешние нагрузки считаются отсутствующими
Уравнения равновесия системы, с учетом ее симметрии относительно оси у, сводятся двум уравнениям в проекциях всех сил на ось y для узлов А и D
- N1 0,7071+ N2 - N5 0,7071=0, - N2 + N3 0,5547+ N4 0,5547=0.
Матрица R –системы уравнений равновесия стержневой системы остается прежней.
ˆ
Матрица P – матрица правых частей уравнений равнове-
сия
ˆ |
0 |
|
|
P 0 . |
|
Удлинение стержня определяется по формуле
|
Ni li |
1 |
|
|
|
li |
|
tli Ci |
Ni |
tli . |
|
EFi |
|||||
|
|
|
|
где N i - нормальная сила в поперечном сечении стержня; li -
длина участка стержня; Е – модуль упругости стержня; F – площадь поперечного сечения стержня на участке с номером i ; - коэффициент линейного расширения материала стержня.
В матричном виде получается
D ˆ |
|
|
C 1N |
tl , |
где C 1 - матрица, обратная к матрице жесткости системы;
ˆ |
T |
- матрицастолбец длин стержней. |
||
l |
l1 , l3 , l4 , l5 |
|||
|
Умножение этого выражения на RC дает |
|||
|
|
|
|
|
|
|
RCD ˆ RCC 1N |
tRCl . |
|
|
По определению CC 1 |
I , где I - единичная матрица. |
||
|
|
ˆ |
0 , получается |
|
|
Поскольку RI R и RN |
|||
|
|
RCD ˆ |
tRCl . |
|
В результате перемножения получается
125

RC |
EF |
- 0,6667 |
1,0000 |
|
|
0,0000 |
0,0000 - 0,6667 . |
|||||
|
|
|
0,0000 |
- 1,0000 0,9231 |
0,9231 |
0,0000 |
||||||
|
|
|
M |
RCD |
|
EF - 1,9428 |
1,0000 |
. |
||||
|
|
|
|
|
|
|
|
|
1,0000 |
- 2,02411 |
|
|
|
Уравнения для определения базовых перемещений в мат- |
|||||||||||
ричной форме имеют вид |
|
|
tRCl , |
|
|
|
||||||
|
|
|
|
|
|
M ˆ |
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
EF |
- 1,94 |
1,00 |
u1 |
|
tEF |
|
|
- 0,666 |
1,0 |
0,000 0,000 - 0,67 |
||
1,00 - 2,02 |
u2 |
|
|
|
0,000 - 1,0 0,923 0,923 0,00 |
|||||||
|
|
|
|
|
||||||||
|
|
|
|
2,1213 |
|
|
|
|
|
|
||
|
|
|
|
2 |
|
|
- 0,8284 |
|
|
|
||
|
|
|
|
x 1,8028 |
tEF . |
|
||||||
|
|
|
|
|
1,3282 |
|
||||||
|
|
|
|
1,8028 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2,1213 |
|
|
|
|
|
|
||
|
Обратная матрица системы |
|
|
|
|
|||||||
|
|
|
M 1 |
- 0,6902 |
- 0,3410 |
/ EF . |
|
|||||
|
|
|
|
|
- 0,3410 |
- 0,6625 |
|
|
||||
|
Решение системы |
|
|
|
|
|
|
|
|
|||
1 |
|
|
- 0,6902 |
- 0,3410 |
|
0,8284 |
|
0,1188 |
||||
|
|
t - 0,3410 |
|
|
|
|
|
|
t |
0,5974 . |
||
2 |
|
|
- 0,6625 |
|
1,3282 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть |
|
|
|
|
|
|
|
|
|
|
|
|
g |
E |
tF |
2 105 |
125 10 7 *(+35)*31,853= 2787,12 Н. |
|||||||
|
Матрица нормальных сил в стержнях |
|
|
|||||||||
|
|
|
|
|
|
CD ˆ |
|
|
|
|
||
|
|
|
|
|
N |
tCl , |
|
|
||||
126
|
|
0,9428 |
0,0000 |
0,0000 |
0,0000 |
0,0000 |
|
|||
|
|
0,0000 |
1,0000 |
0,0000 |
0,0000 |
0,0000 |
|
|||
|
|
|
|
|
|
|
|
|
||
|
N |
g 0,0000 |
0,0000 |
1,6641 |
0,0000 |
0,0000 |
x |
|||
|
|
0,0000 |
0,0000 |
0,0000 |
1,6641 |
0,0000 |
|
|||
|
|
0,0000 |
0,0000 |
0,0000 |
0,0000 |
0,9428 |
|
|||
|
|
0,7071 |
0,0000 |
|
|
2,1213 |
|
|||
|
|
- 1,0000 |
1,0000 |
0,1188 |
2 |
|
|
|||
|
x |
0,0000 |
- 0,5547 |
1,8028 H, |
||||||
|
0,5974 |
|||||||||
|
|
0,0000 |
- 0,5547 |
1,8028 |
|
|||||
|
|
|
|
|
||||||
|
|
0,7071 |
0,0000 |
|
|
2,1213 |
|
|||
- 5353,37 -7570,81 - 6824,23 - 6824,23 - 5353,37 T Н. |
||||||||||
N |
||||||||||
|
Проверка решения уравнений равновесия |
|
||||||||
|
|
|
|
|
|
|
- 5353,37 |
|
||
|
- 0,707 1,0 |
0,000 |
0,000 - 0,707 |
- 7570,81 |
0 |
|||||
|
|
|||||||||
RN |
0,000 - 1,0 |
0,554 |
0,554 0,000 |
- 6824,23 |
0 . |
|||||
|
|
|
|
|
|
|
- 6824,23 |
|
||
|
|
|
|
|
|
|
- 5353,37 |
|
||
Как видно, решение найдено верно.
Температурные напряжения определяются по формулам
i Ni / k Fi F .
Матрица нормальных температурных напряжений имеет
вид
|
|
|
|
- 5353,3724/2 |
- 84,0328 |
|
1 |
|
1 |
- 7570,8118/2 |
- 118,8403 |
|
|
||||
|
|
N |
|
- 6824,2375/3 |
- 71,4141 МПа . |
|
F |
31,853 |
|||
|
|
- 6824,2375/3 |
- 71,4141 |
||
|
|
|
|
||
|
|
|
|
- 5353,3724/2 |
- 84,0328 |
Пример 11. Подбор сечений стержней плоской статически
127
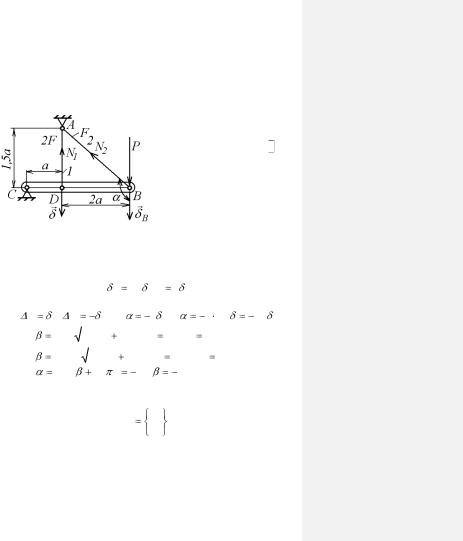
неопределимой системы с твердым телом Для заданной стержневой системы (рис. 1.11), состоящей
из стальных стержней круглого поперечного сечения, требуется подобрать диаметры поперечных сечений стержней, если известны: соотношение площадей, величина действующей на-
грузки и допускаемое напряжение.
Исходные данные:
а = 0,7м; Р = 50 кН;  =
=
160 МПа.
Решение Так как диск может со-
вершать только вращательное движение, система один раз кинематически определима. В качестве базового перемещения выберем пере-
мещение  точки D. В таком случае перемещение точки В будет равно
точки D. В таком случае перемещение точки В будет равно
|
|
|
|
B |
3a / a |
3 . |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Выразим удлинения стержней через базовое перемещение |
|||||||||||
l1 |
, l2 |
|
B cos |
3 |
|
cos |
3 |
0,6 |
1,8 , |
||
где cos |
2a / |
( 2a )2 |
( 1,5a )2 |
|
2 / 2,5 |
0,8 ; |
|
||||
sin |
1,5a / |
|
( 2a )2 |
( 1,5a )2 |
|
1,5 / 2,5 |
0,6 ; |
|
|||
cos |
cos( |
0,5 |
) |
sin |
0,6. |
|
|
|
|||
Таким образом, матрица связи деформации стержней с базовыми перемещениями будет иметь вид:
1
D 1,8 .
Рассмотрим равновесие диска, заменив действия на него со стороны стержней нормальными силами. В качестве уравнения равновесия системы возьмем уравнения равновесия моментов относительно точки С
128
N1 a N2 1,8a P3a 0 , или N1 1,8N2 3P .
Таким образом, матрица системы уравнений равновесия имеет вид:
R  1 1,8 .
1 1,8 .
Как видно, в данном случае матрицу D можно было бы получить простым транспонированием матрицы R.
Жесткости стержней:
C |
2EF |
1,333 |
EF |
, C |
|
2EF |
0,4 |
EF |
. |
|
|
1 |
|
|
|||||
1 |
|
a |
2,5a |
|
a |
||||
|
1,5a |
|
|
|
|||||
Матрица жесткостей системы
C |
1,333 |
0 |
EF |
. |
0 |
0,4 |
|
||
|
a |
|||
Система уравнений равновесия диска в матричной форме имеет вид
ˆ ˆ
RCD P ,
где ˆ  - матрица – столбец правой части системы урав-
- матрица – столбец правой части системы урав-
P 3P
нений; ˆ 
 - матрица – столбец базового перемещения. Очевидно, что
- матрица – столбец базового перемещения. Очевидно, что
RCD |
|
EF |
1 |
1,8 |
|
1,333 |
0 |
|
|
1 |
|
||||||
|
|
a |
0 |
0,4 |
|
|
1,8 |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
EF |
1 |
1,8 |
1,333 |
|
2,629 |
|
EF |
. |
||||||||
|
|
|
0,72 |
|
|
||||||||||||
|
a |
|
|
|
|
|
|
|
|
a |
|||||||
Тогда система уравнений принимает вид |
|
|
|||||||||||||||
|
|
|
2,629 |
EF |
|
|
|
3P , |
|
|
|||||||
|
|
|
a |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
откуда следует, что |
|
|
3Pa |
|
|
1,141 |
Pa |
. |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
2,629EF |
|
|
|
|
EF |
|
|
|||||
Зная базовое перемещение, нормальные силы можно выразить через удлинения и жесткости стержней
N |
|
l C |
C 1,141 |
Pa |
1,333 |
EF |
||
1 |
|
|
||||||
|
1 |
1 |
1 |
|
EF |
|
a |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
129 |
|
|
|
1,521P |
1,521 50 |
76,055 кН , |
|
||
N2 l2C2 1,8 C2 1,8 |
1,141 |
Pa |
0,4 |
EF |
|
|
|
||||
|
|
|
EF |
a |
|
0,821P |
0,821 50 |
41,080 кН . |
|
||
Для определения площадей сечений стержней используем условия прочности стержней
|
|
|
|
|
i |
Ni |
/ Fi |
. |
||
Отсюда |
Fi |
|
Ni |
/ i |
или |
|
|
|
||
|
F |
2F |
76,055 103 |
476 мм2 , |
||||||
|
|
|
|
|
|
|||||
1 |
|
|
|
|
160 |
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
F |
F |
41,080 |
103 |
|
257 мм2 . |
|||
2 |
|
|
|
|
160 |
|
|
|||
|
|
|
|
|
|
|
|
|
||
Отсюда получаем два неравенства для определения F F 238мм2 ,F 257мм2 .
Тогда F |
257 мм2 и |
|
|
F |
|
2F 514 мм2 |
, F F 257мм2 . |
1 |
|
2 |
|
Отсюда определяем диаметры стержней
d1 
 4F1 /
4F1 / 

 4
4  514 /
514 /  25,6 мм , d2
25,6 мм , d2 
 4F2 /
4F2 / 

 4
4  257 /
257 /  18,1 мм .
18,1 мм .
Пример 12. Определение удлинений стержней и напряжений
встержнях плоской статически неопределимой системы
ствердым телом
Для заданной стержневой системы (рис. 1.12), состоящей из стержней круглого поперечного сечения с площадями
F1 |
1 см2, F2 2 см2 и F3 |
3 см2, изготовленных из материа- |
|
лов с модулями упругости |
E |
105 МПа, E 2 105 МПа, |
|
|
|
1 |
1 |
E |
0,7 105 МПа. Система нагружена силой Р = 60 кН (рис. |
||
3 |
|
|
|
1.12). Требуется определить удлинения стержней и напряже-
130
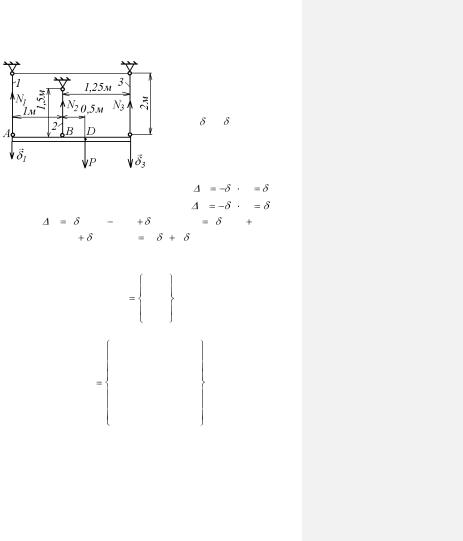
ния в стержнях.
Рис. 1.12
Решение Предполагая возмож-
ность только вертикального перемещения узлов, введем два базовых перемещения 1 и 3 , опреде-
ляющих перемещения узлов А и С, (рис. 1.12) и выразим через них удлинения стержней:
l1 |
|
|
1 , |
1 |
e1 |
||
l3 |
|
|
3 , |
3 |
e3 |
l2 ( 1( AC AB ) |
3 AB ) / AC ( 11,25 |
3 1 ) / 2,25 |
( 5 1 4 3 ) / 9 . |
Матрица связи удлинений стержней с базовыми перемещениями имеет вид
|
1 |
0 |
|
||
D |
5 |
|
4 |
. |
|
9 |
9 |
||||
|
|
||||
|
0 |
1 |
|
||
Матрица жесткостей стержней С имеет вид
|
E1 F1 |
0 |
0 |
|
||
|
l1 |
|
||||
|
|
|
|
|
|
|
C |
0 |
|
E2 F2 |
0 . |
||
|
l2 |
|||||
|
|
|
|
|
|
|
|
0 |
0 |
|
E3 F3 |
|
|
|
|
l3 |
||||
|
|
|
|
|
||
Матрица связи нормальных сил в стержнях с базовыми перемещениями CD имеет вид
131
|
|
|
|
|
|
E1 F1 |
|
0 |
|
|
|
|||
|
c1 |
0 |
|
l1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
CD |
5 |
c2 |
4 |
c2 |
5E2 F2 |
|
4E2 F2 |
. |
||||||
9 |
9 |
|
9l2 |
|
|
9l2 |
|
|
||||||
|
0 |
c3 |
|
|
|
|
|
E |
F |
|
||||
|
|
|
|
|
0 |
|
3 |
|
3 |
|
|
|||
|
|
|
|
|
|
|
|
l3 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Составим уравнения равновесия системы: 1) в проекциях сил на ось у
Piy 0, N1 N2 N3 P 0 ;
2) моментов сил относительно точки В
M B |
0, |
N1 AB N3 BC PBD |
0 или |
N1 |
1,25N3 |
0,5P , или 4 N1 5N3 |
2P . |
Таким образом, система уравнений равновесия рассматриваемой системы имеет вид
4 N1 5N3 2P , N1 N2 N3 P .
Составим матрицу R системы уравнений равновесия стержневой системы
R |
4 |
0 |
5 |
|
1 |
1 |
1 |
||
|
ˆ |
|
|
и матрицу P правых частей системы уравнений равновесия |
||
стержневой системы |
|
|
ˆ |
2 |
|
|
|
|
P |
1 |
P . |
Матрица связи базовых перемещений с внешними силами имеет вид
|
4c1 |
|
|
|
|
5c3 |
|
|||
M RCD ( c |
|
5 |
c |
|
) |
( |
4 |
c |
|
c ) . |
|
|
|
|
|
||||||
1 |
9 |
|
2 |
|
|
9 |
|
2 |
3 |
|
Разрешающая система уравнений задачи имеет вид
M |
ˆ |
ˆ |
|
P . |
Поскольку
132
|
|
|
|
|
|
|
E F |
|
|
2 105100 |
|
7 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
c1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
Н/м, |
|
|
||||
|
|
|
|
l1 |
|
|
|
|
|
2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
E |
2 |
F |
2 105150 |
|
|
|
7 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 10 |
Н/м, |
|
|
||
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
E F |
|
|
|
|
0,7 |
105200 |
|
7 106 |
|
|
|
||||||||||
|
|
c |
|
3 3 |
|
|
|
|
|
|
|
|
|
|
|
|
Н/м, |
|
|
|||||||
|
|
3 |
|
|
l3 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M |
|
4 |
107 |
|
|
|
|
|
|
|
|
|
5 7 |
106 |
|
|
107 |
4 |
3,5 |
. |
||||||
( 4 |
|
5 |
2 )107 |
( |
4 |
2 |
|
0,7 )107 |
5,11 |
1,588 |
||||||||||||||||
|
9 |
9 |
|
|
|
|
||||||||||||||||||||
Тогда система уравнений задачи принимает вид
|
|
|
7 |
|
4 |
|
|
3,5 |
|
1 |
6 10 |
4 |
2 |
. |
|
|
|
||
|
|
|
10 |
5,11 |
1,588 |
|
|
|
1 |
|
|
|
|||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определитель матрицы M |
|
|
|
|
|
|
|
|
|
|||||||||
|
det M |
1014(( |
4 ) 1,588 |
17,888 ) |
|
|
24,24 |
1014 |
|
||||||||||
отличен от нуля и поэтому существует обратная матрица |
|
||||||||||||||||||
|
|
M |
1 |
|
|
107 |
|
|
0,0655 |
00,1443 . |
|
||||||||
|
|
|
|
|
|
|
1014 |
|
|
|
|
||||||||
|
|
|
|
|
24,24 |
|
0,2108 |
|
0,1649 |
|
|
||||||||
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 ˆ |
|
|
|
3 |
|
0,1310 0,1443 |
|
|
|
|
3 |
0,0798 |
|
||||
|
M |
P |
6 10 |
|
|
0,426 |
0,1649 |
|
|
10 |
|
|
3,519 |
. |
|||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Удлинения стержней |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
l1 |
0,0798 мм; |
l3 |
3,519 мм; |
|
|
|
|
|||||||||
|
|
l2 |
( 5 |
0,0798 |
4 3,519 ) / 9 |
1,608 мм. |
|
||||||||||||
|
Нормальные силы в стержнях |
|
|
|
|
|
|
|
|
||||||||||
|
|
N1 |
c1 |
l1 |
|
107 |
0,0798 10 3 |
|
798 Н; |
|
|
||||||||
|
|
N2 |
c2 |
l2 |
2 |
|
107 1,608 10 3 |
|
32,16 кН; |
|
|||||||||
|
|
N3 |
c3 |
l3 |
|
6 |
106 |
3,519 10 3 |
|
21,114 кН. |
|
||||||||
|
Нормальные напряжения в стержнях |
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 |
|
N1 / F1 |
798 / 100 |
7,98 Па; |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
133 |
|
|
|
|
|
|
|
|
|
|
2 |
N2 / F2 |
32160/ 150 |
214 Па; |
3 |
N3 / F3 |
21114 / 200 |
105,507 Па. |
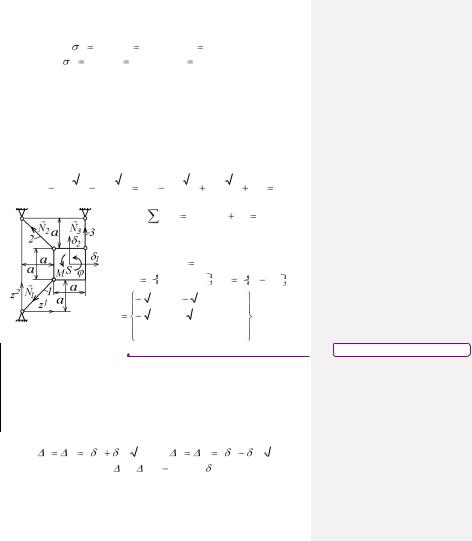
Пример13. Определение перемещений твердого тела
вплоской статически определимой системе
стремя стержнями
Определить перемещения твердого тела и нормальные силы в стержнях системы, изображенной на рис. 1.13. Уравнения равновесия системы
N1 |
|
|
2 |
N 2 |
|
|
2 |
|
0 |
, N1 |
|
|
2 |
|
N |
|
|
|
|
|
2 |
|
N3 |
0 , |
|
||||
|
2 |
|
2 |
|
|
2 |
|
|
2 |
|
|
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
M is |
0, N3 |
|
a |
|
M 0 . |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Матрицы системы уравнений равно- |
|||||||||||||||||||||
|
|
|
|
весия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
(1.21) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
RN |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P , |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
ˆ |
|
|
|
|
T |
|
|||
|
|
|
|
где N |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
; |
||||||||||
|
|
|
|
|
|
N1 , N2 , N3 |
P 0,0, M |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
2 / 2 |
|
|
|
|
2 / 2 |
|
|
|
0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 . |
|
|
||||||
|
|
|
|
R |
|
|
|
|
2 / 2 |
|
2 / 2 |
|
|
|
|
|
|
|
|||||||||||
Рис. 1.13 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
0,5a |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При определении перемещений кон-  Отформатировано цов стержней суммируем перемещения точек твердого тела, как жесткого целого в поступательном движении и перемещения вызванные поворотом тела. В основе этого способа определения перемещения лежит теорема о представлении перемещения точек твердого тела в плоском движении как суммы перемещения полюса и перемещения относительно полюса.
Отформатировано цов стержней суммируем перемещения точек твердого тела, как жесткого целого в поступательном движении и перемещения вызванные поворотом тела. В основе этого способа определения перемещения лежит теорема о представлении перемещения точек твердого тела в плоском движении как суммы перемещения полюса и перемещения относительно полюса.
Тогда выражения для удлинений стержней примут вид
|
|
|
|
|
|
|
|
|
1 |
l1 ( 1 |
2 ) 2 / 2 ; 2 |
l2 ( 1 |
2 ) 2 / 2 ; |
||||
3  l3
l3  0,5a
0,5a 2 .
2 .
Матрица перемещений концов стержней
134