

2614
.pdf10.8) вращается вокруг вертикальной оси BD с постоянной угловой скоростью . По нему из точки В с начальной скоро-
стью v0r начинает скользить без трения кольцо М. Найти отно-
сительную скорость кольца v1r в точке С.
Решение. Скорость v1r определим по теореме об изменении кинетической энергии (10.8), для чего определим работу сил G и Fie , модуль которой Fie m 2x . Работа реакции N равна нулю. Считая xB 0, находим
|
xc |
R |
A( BC )(Fie ) Fxiedx m 2 xdx 0,5m 2R2 . |
||
|
xB |
0 |
Поскольку A( BC )(G) mgR и v0 0 |
||
|
0,5m(vr )2 |
mR( g 0,5 2R). |
|
1 |
|
Отсюда v1r 
 2gR(1 0,5 2R / g ) .
2gR(1 0,5 2R / g ) .
Задачу можно также решить, составляя уравнение (10.7) в проекциях на касательную M и преобразуя затем его левую часть так же, как в задаче 10.2.
10.4.Влияние вращения Земли на равновесие
идвижение тел
При решении большинства инженерных задач систему отсчета, связанную с Землей, считают неподвижной (инерциальной). Тем самым не учитывается суточное вращение Земли и ее движение по орбите вокруг Солнца. Переносная сила инерции в орбитальном движении, которая должна войти в уравнение (10.5) почти уравновешивается силой притяжения Солнца. Следовательно, неинерциальность системы отсчета, связанной
сЗемлей, в основном, вызвана ее суточным вращением вместе
сЗемлей относительно звезд. Это вращение происходит со скоростью: 1 оборот за 23 часа 56 минут 4 секунды, т. е. с угловой скоростью = 0,0000729 1/с.
Оценим влияние неинерциальности земной системы отсчета на равновесие и движение тел.
130

10.4.1. Относительный покой на поверхности Земли. Сила тяжести
|
|
Пусть материальная точка не- |
||||
|
подвижно висит на нити (рис. 10.9). |
|||||
|
Условие ее равновесия относительно |
|||||
|
Земли, |
согласно (10.6), |
имеет вид |
|||
|
F N Fie 0, |
где |
F |
- сила при- |
||
|
тяжения Земли, |
N |
- реакция нити, |
|||
|
Fie |
- переносная сила инерции. Так |
||||
Рис. 10.9 |
как |
const , |
то сила |
Fie , имеет |
||
только |
нормальную |
составляющую, |
||||
направленную перпендикулярно к оси вращения Земли. Пусть
G F Fie .
Сила G называется силой тяжести. Эта сила направлена вдоль нити, натянутой висящим грузом и линия ее действия не проходит через центр Земли.
Тогда на точку М будут действовать две силы G и N ,
уравновешивающие друг друга. Модуль силы Fie Fie m 2r
(r - расстояние точки М от земной оси) мал по сравнению с F
так как величина 2 очень мала. Величина Fie максимальна на экваторе, где r =R. Здесь ее значение составляет около
0,34%, силы притяжения F .
Максимальная разность показанных на рис. 10.9 углов и
достигается при = 45 и составляет 11'. Поэтому направ-
ление силы G мало отличается от направления F .
Весом тела называется сила, с которой тело давит на опору. При неподвижной опоре вес тела равен силе тяжести тела. При движении опоры вместе с телом вес тела зависит от закона движения опоры и поэтому может иметь любую конечную величину и любое направление.
При взвешивании тела определяется сила G , так как именно с такой силой тело действует на механизм весов. Сле-
131

довательно, введение в уравнения равновесия силы тяжести
G , фактически учитывает влияние силы Fie , вызванной вращением Земли и уравнение равновесия тела выглядит как уравнение равновесия относительно инерциальной системы. Поэтому при составлении уравнений равновесия тела относительно Земли никаких поправок на вращение Земли вводить не надо.
10.4.2. Относительное движение вблизи поверхности Земли Для учета вращения системы координат, связанной с Зем-
лей, надо к действующим на точку силам прибавить силы Fie
и Fik . Однако сила Fie входит в силу тяжести G и учитыва-
|
ется вместе с G . Следовательно, ко- |
|||
|
гда система, связанная с Землей, счи- |
|||
|
тается неподвижной, тo фактически |
|||
|
не учитывается только кориолисово- |
|||
|
ва |
сила |
инерции Fik 2m vr sin , |
|
|
где |
- |
угловая скорость вращения |
|
|
Земли, - угол между относитель- |
|||
|
ной скоростью vr точки и осью вра- |
|||
|
щения Земли. |
|||
|
|
Так как величина очень мала, |
||
Рис. 10.10 |
то при не очень больших vr силой |
|||
Fik |
по сравнению с силой тяжести |
|||
|
||||
можно пренебречь. Например, даже при vr = 700 м/сек (ско-
рость обычного артиллерийского снаряда) и = 90 сила Fik
составляет только около 1% от силы G . Поэтому в большинстве расчетов при изучении движения тел вблизи земной поверхности систему отсчета, связанную с Землей, можно действительно считать инерциальной.
Учет влияния вращения Земли необходим или при очень больших скоростях движения (полет ракет дальнего дейст-
132

вия), или для движений, длящихся очень долго (течение рек, воздушные и морские течения).
Рассмотрим качественное влияние вращения Земли на движение тел.
10.4.2.1. Движение по земной поверхности При движении точки по меридиану в северном полушарии
с севера на юг кориолисово ускорение ak направлено на вос-
ток, а сила Fik - на запад. При движении с юга на север сила
Fik будет, очевидно, направлена на восток. Следовательно, в обоих случаях, эта сила будет отклонять точку вправо от направления ее движения.
Если точка движется по параллели на
восток, то ускорение ak будет направлено вдоль радиуса МС параллели (рис. 10.10),
а сила Fik в противоположную сторону. Вертикальная составляющая этой силы (вдоль ОМ) будет несколько изменять вес тела, а горизонтальная составляющая будет направлена к югу и будет отклонять точку вправо от направления движения.
Аналогичный результат получается при движении по параллели на запад.
Следовательно, в северном полушарии тело, движущееся вдоль земной поверхности по любому направлению, будет вследствие вращения Земли отклоняться вправо от направления движения. В южном полушарии отклонение будет происходить влево.
Этим обстоятельством объясняется рис. 10.10, то, что реки, текущие в северном полушарии, подмывают правый берег, если смотреть вниз по течению. В этом же причина отклонений ветров постоянного направления (пассаты) и морских течений.
133
10.4.2.2. Свободное падение Для определения направления кориолисовой силы инер-
ции Fik , действующей на свободно падающую точку, надо знать направление относительной скорости vr точки, Так как сила Fik очень мала в сравнении с силой тяжести G , то в пер-
вом приближении можно считать вектор vr направленным по вертикали, т. е, вдоль линии M0O (см. рис. 10.11). Тогда век-
тор ak будет направлен на запад, а сила Fik - на восток (на рис. 10.11). Следовательно, в первом приближении свободно падающая точка (тело) отклоняется вследствие вращения Земли от вертикали к востоку. Тело, брошенное вертикально вверх, будет, очевидно, отклоняться к западу. Величины этих отклонений очень малы и заметны только при достаточно большой высоте падения или подъема.
10.5.Задачи для самостоятельного решения
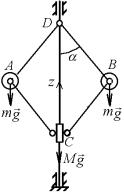
10.5.1.Центробежный регулятор состоит из двух шаров А и В массой m каждый, муфты С массой M и четырех одинаковых невесомых стержней АС = BC = DA
=DB = l, закрепленных по концам шарнирно. Регулятор вращается вокруг неподвижной вертикальной оси z. Определить усилия в стержнях и угловую скорость регулятора, предполагая, что угол , образуемый каждым из стержней с вертикалью сохраняет свое значение (рис. 10.12).
Рис. 10.12 10.5.2. Известно, что на прямолинейном участке железнодорожного пути с углом наклона вагон, получив некоторую начальную скорость
вниз по уклону, движется затем равномерно. Считая сопротивление движению пропорциональным нормальному давлению колес на рельсы, определить закон движения этого вагона, ес-
134

ли он будет двигаться вниз без начальной скорости по прямолинейному участку пути с углом наклона
.
10.5.3.Материальная точка массой m= 0,2 кг, лежащая на горизонтальной поверхности стола, привязана к неподвижной точке О нитью длиной l = 35 см. Точке со-
общена начальная скорость v0 = 4,9
Рис. 10.13
м/с, перпендикулярная к направлению натянутой нити, вследствие
чего точка описывает на столе окружность. Найти скорость точки и, силу натяжения нити через 1 с после начала движения, если коэффициент трения f = 0,25.
10.5.4. Материальная точка М движется по гладкой наклонной плоскости с углом наклона под действием собственной силы тяжести mg ; ее начальная
горизонтальная скорость v0 перпендику-
лярна к линии наибольшего ската этой плоскости. Определить закон движения этой точки и ее траекторию, а также реак-
цию наклонной плоскости (рис. 10.13). |
Рис. 10.14 |
10.5.5. Тяжелая материальная час- |
тица массы m движется по внутренней поверхности шерохо-
|
ватого круглого цилиндра x2 y2 R2 . |
|
|
Коэффициент трения между частицей и |
|
|
цилиндром равен k . В начальный мо- |
|
|
мент частица находится на оси Ох и по- |
|
Рис. 10.15 |
лучает скорость v0 перпендикулярную к |
|
оси Ох и составляющую с плоскостью |
||
|
хОу угол . Составить дифференциальные уравнения движения частицы и определить ее давление на связь. Проинтегри-
135

ровать полученные уравнения в случае гладкой поверхности
(k = 0) (рис. 10.14).
10.5.6. Тело массой m движется прямолинейно с данным ускорением a по горизонтальной плоскости под дей-
Рис. 10.16
Рис. 10.17
ствием некоторой силы F , образующей с горизонтом угол . Определить модуль этой силы, если коэффициент трения между передвигаемым телом и плоскостью равен f (рис. 10.15).
10.5.7. Полая сферическая поверхность радиусом R = 2 м равномерно вращается вокруг своей вертикально расположенной оси симметрии, делая 30 об/мин. Внутри этой поверхности находится шарик массой m = 200 г. Найти высоту h, соответствующую положению равновесия шарика относительно нижней точки этой поверхности и ее реак-
цию N в этом положении (рис. 10.16).
10.5.8.Лента ленточного конвейера наклонена к горизонту под углом . Определить минимальную скорость ленты, при которой переносимая лентой частица руды отделится от поверхности ленты в месте набегания ленты на барабан, если радиус барабана равен R (рис. 10.17).
10.5.9.Математический маятник длиной l и массой m
отвели на угол 0 от положения равновесия и сообщили ему начальную скорость v0 , на-
правленную перпендикулярно к нити вверх. Найти натяжение нити маятника в зависимости от угла , образованного нитью с верти-
калью (рис. 10.18).
Рис. 10.18
136

10.5.10. Материальная частица находится внутри неподвижного цилиндра радиусом R . В начальный момент времени частица находится в положении M0 и получает верти-
кальную скорость v0 . Коэффициент трения частицы о поверхность цилиндра равен f . Пренебрегая действием силы тяжести, найти зависимость между скоростью v частицы и
углом , определяющим ее положение внутри цилиндра (рис. 10.19).
137

Глава 11. ПРЯМОЛИНЕЙНЫЕ КОЛЕБАНИЯ ТОЧКИ
11.1. Свободные колебания без учета сил сопротивления
Одному ученому принадлежит фраза: «Колебания - это единственная форма постоянства, доступная природе». Это означает, что не может быть ничего постоянного, постоянны только процессы изменений.
Механическими колебаниями называется всякий механический процесс периодического изменения положения тела.
Колебания составляет основу многих явлений, изучаемых физикой и техникой. Колебания, рассматриваемые в различных областях, например в механике, радиотехнике, акустике и др., отличаются друг от друга по своей физической природе, но, основные законы этих колебаний во всех случаях одинаковы. Поэтому изучение механических колебаний важно не только потому, что такие колебания очень часто происходят, но и потому, что законы, полученные при изучении механических колебаний, могут быть использованы для изучения колебательных явлений в различных областях естествознания и техники.
Рассмотрим свободные прямолинейные колебания точки М массой т без учета сил сопротивления под действием только одной восстанавливаю-
щей силы F , направленной к неподвижно-
му центру 0 и пропорциональной расстоя-
Рис. 11.1
нию от этого центра. Проекция силы F на ось Ох (рис. 11.1) равна
Fx cx. |
(11.1) |
Сила F , как видно из (11.1), всегда направлена противоположно смещению x от центра О, то есть стремится вернуть
точку в положение равновесия О, где F 0 . По этой причине
138

и используется термин «восстанавливающая» сила. Примером такой силы является сила упругости пружины.
Колебательной системой называется система тел, которая включает колеблющееся тело, тела, создающие восстанавливающую силу и другие тела.
Закон движения точки М определяется из решения дифференциального, уравнения движения точки
|
d2x |
|
|
|
|
|
|
|
m dt2 |
|
|
|
|
||||
vx cx, |
|
|||||||
где t - время. |
|
|
|
|
|
|
||
Пусть |
|
|
|
|
|
|
||
|
k |
|
|
|
. |
(11.2) |
||
|
|
|
c / m |
|||||
Тогда |
|
|
|
|
|
|
||
|
|
|
2 |
x 0. |
(11.3) |
|||
|
x k |
|
|
|||||
Уравнение (11.3) является дифференциальным уравнением свободных колебаний материальной точки при отсутствии сил сопротивления. Решение этого линейного, однородного дифференциального уравнения второго порядка ищется в виде
x ent , где n характеристика колеблющейся системы.
Полагая в уравнении (11.3) x ent , получим для определения n характеристическое уравнение
n2 1 0.
Поскольку это уравнение имеет мнимые корни n1,2 ik ,
то, как известно из теории дифференциальных уравнений, общее решение уравнения (11.3) имеет вид
x C1 sinkt C2 coskt, |
(11.4) |
где C1 и C2 - постоянные интегрирования.
Если вместо C1 и C2 ввести постоянные, а и , такие, что
C1 acos и |
C2 asin , то x a(sinktcos |
coskt sin ) |
или |
x a sin(kt ) . |
(11.5) |
|
Этому решению удобнее придавать физический смысл.
139