

Основы механики. Рябцев В.А., Воропаев А.А
.pdfПо определению |
|
|
d2 |
|
|
|
|
a |
dv |
|
, a |
|
v2 |
/ . |
|
dt |
dt2 |
|
|||||
|
|
|
n |
|
|
Поскольку вектор ускорения a лежит в соприкасающейся плоскости Mbn, ab 0. В итоге получаем следующие диффе-
ренциальные уравнения движения точки по заданной кривой
|
|
dv |
|
d2 |
|
Fka , |
|
||||
m |
|
|
|
Fka |
или m |
|
|
|
(10.2) |
||
|
|
|
dt |
2 |
|||||||
|
v2 |
dt |
|
|
|
|
|
||||
m |
|
Fkna Nn , 0 Fkba |
Nb . |
(10.3) |
|||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
Эти уравнения позволяют решить обе задачи несвободного движения, сформулированные в 10.4.
Уравнение (10.2) не содержит неизвестной реакции N и позволяет определить закон движения точки вдоль кривой, т. е. зависимость (t ). Уравнения же (10.3) служат для опреде-
ления реакции связи N (см. 10.2) и ими можно пользоваться и в случае, когда соприкасающиеся поверхности не являются гладкими. Для этого только нужно учесть силу трения.
При отсутствии связи N 0 уравнения (10.2) и (10.3) верны и описывают движение свободной точки.
Задача 10.1. Тяжелому кольцу М, нанизанному на горизонтально расположенное неподвижное гладкое проволочное кольцо радиуса R , сообщают начальную скорость v0 , направ-
ленную по касательной к окружности большого кольца. При движении на кольцо действует сила сопротивления F km
 v , где m - масса кольца, v - его скорость, k - постоянный коэффициент. Определить время движения кольца до остановки.
v , где m - масса кольца, v - его скорость, k - постоянный коэффициент. Определить время движения кольца до остановки.
120
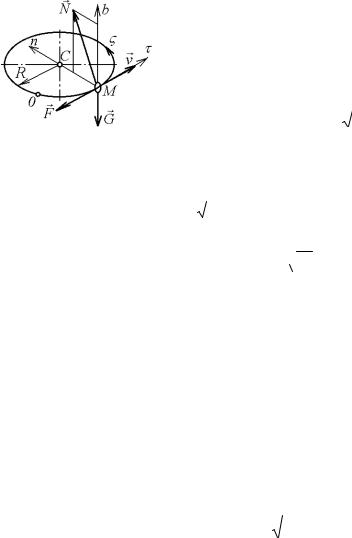
Решение. Помещаем начало отсчета О в начальном положении кольца (рис. 10.2). Изображаем кольцо в произвольном
|
положении и проводим оси M , |
Mn и |
|||||||||
|
Mb. На кольцо действуют сила тяже- |
||||||||||
|
сти G mg , |
реакция N и сила сопро- |
|||||||||
|
тивления |
|
F . |
Учитывая, |
что |
||||||
|
G N 0, |
F |
F , из уравнения |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
(10.2), получим mv km v . |
|
|||||||||
Рис. 10.2 |
Разделяя переменные и учитывая, |
||||||||||
что при t = 0 v v0 получим |
|
||||||||||
|
|
||||||||||
|
v |
dv |
|
|
|
v |
|
|
|
|
|
|
|
|
k |
dt. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
V |
|
v |
V |
|
|
|
|
|||
|
0 |
|
|
|
|
|
0 |
|
|
|
|
В момент времени остановки груза t t1 v 0 . Подстав-
ляя в это уравнение v 0 , получим t1 2
 v0 / k .
v0 / k .
Задача 10.2. В предыдущей задаче найти путь , пройденный кольцом до остановки, считая, что на него действует сила трения F fN : радиус кольца R= 0,3 м, начальная скорость v0 2 м/с, коэффициент трения между кольцами f 0,3.
Решение. Выбираем начало отсчета и проводим оси M , Mn и Mb так же, как и в предыдущей задаче (см. рис. 10.2). Действующими на кольцо силами будут G mg , N и
сила трения F . Составляя уравнения (10.2), (10.3), получим систему
|
|
2 |
/ R Nn |
, 0 G Nb . |
||
mv F , mv |
|
|||||
Модуль силы |
трения F fN |
f |
Nb2 Nn2 |
. Как видно |
||
F f ( Nb Nn ). Это значит, что определять силу трения на основании принципа суперпозиции как сумму сил трения, по-
рожденных составляющими силы N , нельзя. 121

Поскольку Nb G mg , F fm
 g2 v4 / R2 .
g2 v4 / R2 .
Как видно, сила трения зависит через реакцию N от скорости движения кольца. Поэтому данную задачу, как и предыдущую, нельзя решить с помощью теоремы об изменении кинетической энергии.
Поскольку |
dv |
|
dv |
|
|
d |
|
|
dv |
v, |
|
|
|
|
|
|
|||||||||||||||
|
d |
|
|
|
dt |
|
d |
|
|
|
|
|
|
||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
уравнение движения кольца примет вид |
|||||||||||||||||||||||||||||||
|
|
|
dv |
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
v |
|
|
g2R2 v4 |
. |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
R |
|||||||||||||||||||||||||
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Разделяя переменные, и интегрируя, получим |
|||||||||||||||||||||||||||||||
|
|
v |
|
|
|
|
|
d(v |
2 |
) |
|
|
|
|
|
2 f |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d . |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
||||||||||
|
|
|
|
g |
|
2R2 |
|
v4 |
|||||||||||||||||||||||
|
|
v |
|
|
|
|
|
|
0 |
|
|
|
|
||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2 f |
|
|
|
|
|
|
|
||||||||||||||||||||||
Отсюда следует |
ln(v2 |
g2R2 v4 ), или |
|||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
R |
|
ln |
|
v02 |
|
g2R2 v04 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|||||||||
|
2 f |
|
|
v2 |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
g2R2 v4 |
||||||||||||||||||||
В момент остановки v0 = 0. Если принять g 10 м/с2, то
|
R |
v02 |
g2R2 v04 |
||
1 |
|
ln |
|
|
0,5ln3 0,55 м. |
|
|
|
|||
|
2 f |
|
gR |
||
10.2. Определение реакций связей При движении точки по заданной кривой реакция связи
находится с помощью уравнений (10.3). При этом движущуюся точку следует изображать в том положении, для которого определяется эта реакция. Если скорость v , входящая в уравнение (10.3), заранее не известна, то во многих случаях ее можно определить по теореме об изменении кинетической энергии (9.6).
122

Уравнение (10.3) показывает, что при криволинейном
движении динамическая реакция N , в отличие от статической, зависит не только от действующих активных сил и вида связи, но и от скорости движения.
Задача 10.3. Груз массы m, подвешенный на нити длиною l, отклоняют от вертикали в положение M0 , и отпускают без
начальной скорости. Определить силу натяжения нити T в момент, когда груз дойдет до низшего положения M .
Решение. Изображаем груз в том положении, для которого надо найти натяжение нити, т. е. в положении М (рис. 10.3). На
груз действуют сила тяжести G и реакция нити T . Пусть нормаль Mn направлена к центру кривизны траектории, а v1 - скорость груза в положении М. Поскольку в данном случае l, уравнение
(10.3) имеет вид
mv12 / l T G или T G mv12 / l .
Скорость v1 определим из (9. 15)
0,5mv12 0,5mv02 A(aM0M1 ) .
Работу на участке M0M1 совершает только сила G . Поэтому
A(aM M ) Gh Gl(1 cos ). Поскольку
0 1
Рис. 10.3
v0 0, получим 0,5mv12 mgl(1 cos ) и
Tmg(3 2cos ).
Вчастном случае, если угол начального отклонения =
90 , натяжение нити при прохождении через вертикаль будет равно 3mg , т. е. утроенной силе тяжести груза.
Из этого решения следует, что динамические реакции могут значительно отличаться от статических.
123

Задача 10.4. Желоб состоит из двух дуг АВ и BD окружностей радиуса R, расположенных в вертикальной плоскости так, что касательная BE в точке сопряжения дуг горизонтальна (рис. 10.4). Пренебрегая трением, определить, на какой высоте h над линией BE надо положить в желоб тяжелый шарик чтобы он соскочил с желоба в точке М, лежащей на таком же расстоянии h ниже линии ВЕ.
Решение. Шарик оторвется от желоба в той точке М где его давление на желоб (или реакция N желоба) станет нулевым.
Следовательно, задача сводится к определению зависимости N(h). Изображаем шарик в точке М. На него действуют
сила тяжести |
G и реакция желоба |
N . Составляя уравнение |
|||||||
(10.3) в проекциях на внутрен- |
|
|
|||||||
нюю |
нормаль |
Mn, |
получим |
|
|
||||
mv2 |
/ R Gcos N . |
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
Учитывая, что |
|
|
|
|
|
|
|
|
|
Rcos KC R h, |
|
N 0, по- |
|
|
|||||
лучим |
|
|
|
|
|
|
|
|
|
mv2 |
G( R h). |
|
|
(а) |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Величину |
mv2 |
найдем |
из |
|
|
||||
|
|
|
1 |
|
|
|
|
|
|
теоремы об изменении кинети- |
|
Рис. 10.4 |
|||||||
ческой энергии. Так как v0 |
0, |
|
|
||||||
уравнение (9.15) дает |
|
|
2 |
Aa |
|
|
|||
|
|
|
|
|
0,5mv |
|
. |
||
|
|
|
|
|
|
1 |
( M0M1 ) |
|
|
Работу A(G) 2mgh здесь совершает только сила G . То- |
|||||||||
гда, |
mv2 4mgh. |
Подставляя это выражение в (а), получим |
|||||||
|
1 |
|
|
|
|
|
|
|
|
4h R h , откуда h 0,2R.
Задача 10.5. Груз М подвешен на нити длиною l (рис. 10.5). Какую наименьшую начальную скорость v0 , перпендикуляр-
124

ную нити, надо сообщить грузу, чтобы он описал полную окружность?
|
Решение. Груз опишет полную окруж- |
|
ность, если на всем пути сила натяжения ни- |
|
ти нигде (кроме, может быть, точки М') не |
|
обратится в нуль, т. е. нить всюду будет на- |
|
тянута. Если же в какой - либо точке M1 , |
|
где v 0 , сила натяжения нити обратится в |
|
нуль, то нить перестанет удерживать груз на |
|
круговой траектории (перестанет быть свя- |
|
зью), и он будет продолжать движение как |
|
свободное тело (по параболе). |
|
Найдем силу T натяжения нити в про- |
|
извольном положении М, определяемом уг- |
|
лом , и потребуем, чтобы было T 0 при |
Рис. 10.5 |
любом 180 . |
В положении М на груз действуют сила тяжести G и сила натяжения нити T . Уравнение (10.3) в проекциях на внутрен-
нюю нормаль Mn имеет вид |
|
mv2 / l T Gcos , |
(а) |
где v - скорость груза в положении М.
В данном случае работу совершает сила тяжести. По теореме об изменении кинетической энергии
0,5mv2 0,5mv02 A(aM0M1 ) = Gh 2Gl(1 cos ).
Следовательно, mv2 mv02 2Gl(1 cos ).
Из (а) следует T mg(3cos 2 v02 / gl ).
Минимум T будет при = 180
Tmin mg( 5 v02 / gl ).
125

|
Чтобы T нигде (кроме, может быть, точки М') не обрати- |
|||||||
лось в нуль, |
необходимо, чтобы |
было Tmin 0. |
Отсюда |
|||||
v2 |
/ gl 5 или v |
|
. |
|
|
|
|
|
5gl |
|
|
|
|
||||
0 |
|
0 |
|
|
|
|
|
|
|
Следовательно, груз будет описывать полную окружность, |
|||||||
при начальной скорости не менее v0 |
|
5gl |
. |
|
||||
|
|
|
|
Стержень, в отличие от нити, мо- |
||||
|
|
|
жет воспринимать и растяжение и сжа- |
|||||
|
|
|
тие. Если груз подвесить на жестком, |
|||||
|
|
|
легком (невесомом) стержне длины l, то |
|||||
|
|
|
груз опишет полную окружность, если |
|||||
|
|
|
при движении его скорость нигде, кро- |
|||||
|
|
|
ме, может быть, точки М', не обратится |
|||||
|
|
|
в нуль. Используя уравнение (10.15) |
|||||
|
Рис.10.6 |
|
для перемещения M0M , и считая, что |
|||||
|
|
|
в точке М' скорость v 0 |
получим |
||||
mv02 mg2l . Тогда v0min 2
 gl .
gl .
10.3.Уравнения относительного движения
ипокоя точки
Законы динамики и полученные из них в предыдущих уравнения и теоремы верны только для абсолютного движения точки, т. е. движения относительно инерциальной (неподвижной) системы отсчета.
В этой главе рассмотрено относительное движение точки, т. е. движение относительно неинерциальной, произвольно движущейся системы отсчета.
Пусть материальная точка М движется под действием при-
ложенных к ней сил F1, F2 , ..., Fn относительно системы Oxyz
(рис. 10.6), которая по известному закону движется относительно неподвижной системы Ox1y1z1.
Для определения зависимости между относительным ус-
корением точки ar и действующими на нее силами используем основной закон динамики для абсолютного движения
126
ma Fk . |
(10.4) |
По теореме Кориолиса a ae ar ak , где ar , ae и ak -
относительное, переносное и кориолисово ускорения точки.
Тогда mar m(a ae ak ) Fk ( mae ) ( mak ).
Пусть Fie mae , Fik mak . Величины mae и mak по размерности являются силами. Их называют соответственно переносной и кориолисовой силами инерции, Тогда предыдущее уравнение примет вид
mar Fk Fie Fik . |
(10.5) |
Это уравнение выражает основной закон динамики для относительного движения точки. Из сравнения (10.4) и (10.5),
следует, что: все уравнения механики относительного движения точки можно составлять так же, как и уравнения абсолютного движения, прибавляя к действующим на точку силам
пeреносную и кориолисову силы инерции. Добавление сил Fie и
Fik , позволяет учесть влияние движения подвижной системы отсчета на относительное движение точки.
Возможны следующие частные случаи.
1. Подвижные оси движутся поступательно. Так как в этом случае вращение подвижной системы отсутствует и угловая скорость вращения подвижной системы Oxyz 0 , то Fik = 0,
и уравнение относительного движения принимает вид mar Fk Fie .
2. Если подвижные оси перемещаются поступательно,
равномерно и прямолинейно, то Fie = 0, Fik = 0 и закон относительного движения будет иметь такой же вид, как и закон движения относительно неподвижной системы. Поэтому такая система отсчета также будет инерциальной.
Следовательно, либо существует бесконечно много инерциальных систем отсчета, либо не существует ни одной.
Из полученного результата вытекает, что никакими меха-
ническими экспериментами нельзя обнаружить, находится ли
127
данная система отсчета в покое или совершает поступательное, равномерное и прямолинейное движение. В этом со-
стоит принцип относительности классической механики, сформулированный еще Галилеем.
3. Если точка относительно подвижной системы находится в покое, то для нее ar 0 , vr 0, а следовательно и Fik = 0,
так как кориолисово ускорение ak 2( e vr ). Тогда (10.5) принимает вид
Fk Fie 0. |
(10.6) |
Это уравнение относительного равновесия (покоя) точки.
Из него следует, что уравнения относительного равновесия можно составлять тaк же, как и уравнения равновесия в неподвижной системе координат, добавляя к действующим на точку силам переносную силу инерции.
4. При составлении уравнений относительного движения в
случаях, когда Fik 0 , надо учитывать, что
Fik mak 2m( e vr )
и, следовательно, сила Fik перпендикулярна к vr , а значит, и к касательной к относительной траектории точки. Поэтому:
|
а) проекция кориолисовой силы инерции на касательную |
||||
M |
к относительной траектории точки всегда равна нулю |
||||
(Fik |
0) и уравнение (10.2) в относительном движении при- |
||||
|
|
|
|
|
|
мет вид |
|
|
|||
|
m |
dv |
r |
Fk Fie . |
(10.7) |
|
|
||||
|
|
dt |
|
|
|
б) работа кориолисовой силы инерции на любом относительном перемещении равна нулю (см. 9.4, формула (9.10)), и
теорема об изменении кинетической энергии в относительном движении примет вид
0,5m(v1r )2 0,5m(v0r )2 |
Ak A(Fie ). |
(10.8) |
где - v1r и v0r относительные скорости.
128

Во все остальные уравнения относительного движения будут в общем случае входить и переносная, и кориолисова силы инерции.
Задача 10.6. Считая массы всех вращающихся частей центробежного регулятора (рис. 10.7) малыми в сравнении с массами шаров В и D, найти угол при котором стержень АВ длиной l, окажется в относитель-
ном равновесии, если регулятор вращается с постоянной угловой скоростью .
Решение. Для определения положения относительного равновесия (относительно вращающейся вместе с регулятором системы отсчета) прикладываем к действую-
щим на шар В силе тяжести G |
и |
Рис. 10.7 |
|||
реакции |
N «переносную силу |
||||
|
|
||||
инерции» |
Fie . При const , |
ae ane BC 2 |
l 2 sin . |
||
Тогда Fie ml 2 sin . Сила Fie направлена противоположно ускорению ane , т. е. вдоль линии СВ. Урав-
нение равновесия в проекции на ось B , перпендикулярную к АВ, имеет вид
-G sin Fiecos 0.
|
Подставляя сюда силу |
Fie |
и сокращая |
|
||||
на |
sin 0 (решение |
= |
0 |
отбрасываем |
|
|||
как |
соответствующее |
0 ), |
получим |
|
||||
g l 2 |
cos 0 |
или |
cos g / l 2 . По- |
|
||||
скольку |
cos 1, |
равновесие при 0 |
|
|||||
возможно только, при 2 g / l . |
|
|
||||||
|
Задача 10.7. Стержень, ось |
которого |
Рис. 10.8 |
|||||
есть полуокружность BCD радиуса R (рис. |
|
|||||||
|
|
|
|
|
129 |
|
|
|