

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfЗАКЛЮЧЕНИЕ
В ходе исследования в среде визуального програм-
мирования MexBIOS Development Studio реализована структура векторного управления СДПМ, которая была сначала проверена с помощью средств моделирования данной среды и затем запущена на преобразователе частоты с микропроцессорным модулем. Подобный подход позволяет снизить число ошибок и неточностей при проектировании системы управления двигателем, а также произвести отладку программы в различных режимах работы системы управления, а также более наглядно показать принцип работы системы управления. Наличие готовых шаблонов программ и процедур из библиотек среды MexBIOS Development Studio существенно увеличивает скорость разработки СУ электроприводом. Реализованная в работе система векторного управления СДПМ может быть использована для создания программной части СУ СДПМ в датчиковом режиме в других системах векторного управления. Дальнейшее развитие данная система управления может получить с добавлением алгорит-
мов идентификации параметров двигателя и реализацией бездатчикового управления.
Благодарности
Исследование выполнено за счет гранта Российского научного фонда (проект № 15-19-20057).
Библиографический список
1.Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л.: Энергоиздат, 1982.
2.Водовозов А.М., Елюков А.С. // Вестн. Иван. гос. энерг. ун-та. 2010. № 2. С. 69–71.
3.Визуальная среда разработки и моделирования MexBIOS Development Studio. (Visual software for development and simulation MexBIOS Development Studio) [Электронный ресурс]. URL: http: //mechatronica-pro.com/ru/catalog/software/mexbiosdevelopmentstu- dio/35 (дата обращения: 21.04.2016).
4.Калачев Ю.Н. Векторное управление [Электронный ресурс]. URL: http: //www.privod-news.ru/docs/Vector_Kalachev.pdf (дата обращения: 21.04.2016).
5.Преобразователь частоты с открытой программной платформой
MBS-FC01 [Электронный ресурс]. URL: http: //mechatronicapro.com/ru/catalog/inverter/62 (дата обращения: 21.04.2016).
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 131 -
УДК 621.3.088.7 / 621.389
Проектирование микроконтроллера, специализированного под задачи векторного регулирования электроприводов
А.В. Лужбинин, С.С. Шумилин |
С.В. Гусев |
ЦПИС АО «ПКК Миландр», |
Московский национальный университет электронных |
Москва, Россия |
технологий (НИУ) «МИЭТ», Россия |
Design of microcontroller for vector control of electric machines
A.V. Luzhbinin, S.S. Shumilin |
S.V. Gusev |
JSC “ICC Milandr”,
Moscow, Russian Federation
Рассматриваются структура и основные блоки микроконтроллера, специализированного под задачи управления электроприводами различных типов. Особое внимание уделено вычислительным возможностям микропроцессорных ядер, функциональным возможностям и взаимодействию блоков аналого-цифровых преобразователей и широтно-импульсных модуляторов, наиболее важных для рассматриваемого круга задач.
The structure and basic blocks of novel microcontroller for vector control algorithms is described. Particular attention is paid to the microprocessor cores of the design, functional capabilities and interaction between blocks.
Ключевые слова: векторное регулирование, микроконтроллер, широтно-импульсный модулятор, аналого-циф- ровой преобразователь.
Keywords: machine vector control, microcontrollers, pulse width modulation, analog-digital conversion.
ВВЕДЕНИЕ
В настоящее время использование микропроцессоров для задач управления электродвигателями обусловлено жесткими требованиями к скорости реакции системы и диапазону регулирования частоты, которых можно достичь только с использованием современных алгоритмов управления, требовательных к вычислительной мощности процессора, качеству и функциональным возможностям цифро-аналоговых блоков.
Наиболее часто применяемым алгоритмом управления в современных системах является алгоритм векторного регулирования приводов. В основу алгоритма положено преобразование координат из трехфазной системы, ориентированной по обмоткам статора двигателя во вращающуюся синхронно с вектором потокосцепле-
National Research University of Electronic Technology (MIET),
Moscow, Russian Federation
ния ротора систему координат и разделения контуров регулирования тока обмоток и скорости вращения электропривода [1, 2].
Для осуществления преобразования координатных систем требуется большой объем тригонометрических вычислений, которые необходимо производить каждый период регулирования тока в обмотках двигателя, что во много раз превышает частоту вращения самого ротора. Также большой объем вычислений предполагают алгоритмы расчета скорости вращения ротора, особенно в случае реализации управления без использования датчиков положения.
Наиболее критичными периферийными блоками системы для реализации современных алгоритмов программного управления электроприводами являются ши- ротно-импульсный модулятор (ШИМ), с помощью которого задаются управляющие воздействия, и аналогоцифровые преобразователи (АЦП) для получения обратной связи с обмоток привода. При этом для эффективной реализации алгоритма управления АЦП и ШИМ должны быть тесно синхронизованы друг с другом. Кроме того, для большинства задач необходимо наличие в системе блоков обработки сигналов датчиков положения, таких как блок захвата и квадратурный декодер. использование которых существенно сокращает сложность вычислений, необходимых для определения скорости ротора, что упрощает организацию контура регулирования скорости.
В настоящее время появляются отечественные микросхемы, ориентированные на задачи управления приводами. В работе [3] приводится функциональное сравнение ряда российских разработок с микроконтроллером TMS320C28, одного из признанных мировых лидеров в области микросхем для управления электродвигателями компании Texas Instruments [4]. Отечест-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 132 -
венные микроконтроллеры обладают повышенными функциональными возможностями периферийных блоков, позволяющими использовать их для решения задач регулирования электрических машин, однако их вычислительные возможности существенно ниже западного аналога.
Компания АО «ПКК Миландр» заканчивает разработку микроконтроллера, специализированного под задачи управления двигателями. В данной статье описаны состав и функциональные особенности периферийных блоков микроконтроллера, и также вычислительные возможности интегрированных микропроцессорных ядер с точки зрения организации на его основе современных систем векторного регулирования электроприводами.
I. ВЫЧИСЛИТЕЛЬНЫЕ ВОЗМОЖНОСТИ МИКРОКОНТРОЛЛЕРА
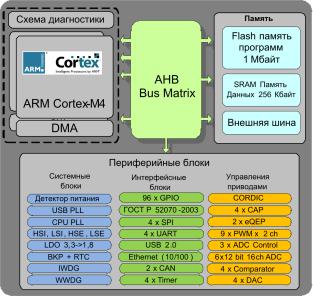
Структурная схема разрабатываемого микроконтроллера представлена на рис. 1. В основу кристалла положены два вычислительных RISC-ядра ARM Cortex-M4F, включающие аппаратную поддержку инструкций ЦОС и дающие возможность обработки переменных с плавающими точками. Для каждого из вычислительных ядер микроконтроллера интегрирован свой собственный блок прямого доступа к памяти. Тактовая рабочая частота микросхемы предполагается на уровне 200 МГц.
Работа вычислительных ядер возможна как в параллельном независимом режиме, где каждое ядро выполняет свой независимый алгоритм с равноправным доступом ко всем ресурсам микроконтроллера, так и в защищенном от сбоев режиме lock step, в котором управление системой производится только одним вычислительным ядром, в то время как второе дублирует все производимые операции. Расхождения в результатах их работы воспринимается как критический сбой и запускает функции восстановления системы. Данный режим может
Рис. 1. Структурная схема микроконтроллера
быть использован для высоконадежных приложений или для работы в агрессивных условиях. Полагаем, что вслучае решения задач управления силовыми электрическими машинами данный режим особенно актуален, так как сбой управляющей системы может привести к серьезнымтехнологическимавариям.
В случае работы микропроцессорных ядер в независимом режиме возможна организация системы управления несколькими электроприводами, в которой программное управление каждого из электроприводов реализовано на своем собственном вычислительном ядре, что существенно упрощает написание кода и повышает эффективность использования вычислительных возможностей микросхемы.
На этапе разработки архитектуры микроконтроллера рассматривался вариант добавления третьего ядра ARM Cortex M0, которое совместно с тригонометрическим сопроцессором позволило бы независимо реализовать контроль токов системы, но, учитывая необходимость синхронизации и передачи большого объема параметров между токовым и скоростным контурами системы, от этой идеи решено было отказаться.
Другим возможным вариантом организации системы является использование одного из ядер для управления одним или несколькими приводами, в то время как другое ядро отвечает за организацию общего управления системой и интерфейса оператора. Для реализации такой системы в составе микроконтроллера, кроме базовых SPI, UART и I2C, реализованы контроллер Ethernet 10/100, CAN, ГОСТ Р 52070-2003, также известный как MIL-STD1553, и High Speed USB, включающий кон-
троллеры канального и физического уровня.
Загрузка процессора осуществляется из встроенного ПЗУ, далее программа выполняется из внутренней flash памяти объемом 1 Мбайт, что достаточно как для алгоритмов и констант управления электроприводами, так и для использования коммуникационных возможностей микроконтроллера, например сетевого стека. Также в кристаллесодержитсяпамятьОЗУразмером256 Кбайт.
II. БЛОКИ ВЫЧИСЛЕНИЯ ТРИГОНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ
Вслучае реализации 100 кГц периода ШИМ, что практически является максимально возможной рабочей частотой транзисторов, используемых для питания обмоток электрических машин, управляемых контроллером такого типа, возможно выполнение до двух тысяч инструкций за один период токового контура регулирования. В целом этого достаточно для организации всех необходимых координатных преобразований, регуляторов тока и расчета компенсаций перекрестных связей
всистеме.
Вто же время в случае неоптимизированной реализации вычисления тригонометрических функций на основе стандартных библиотек реализация тригонометрических функций занимает до нескольких сотен тактов. При реализации системы векторного регулирования одного электропривода необходимо производить несколько преобразований, кроме того, часть машинно-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 133 -
го времени необходимо уделять непосредственно регулированию тока и расчету и регулированию скорости вращения ротора. Программисту приходится оптимизировать библиотечные математические функции для реализации систем управления с повышенной частотой широтно-импульсной модуляции.
Интегрированный в состав микроконтроллера блок аппаратного расчета тригонометрических функций на основе алгоритма CORDIC позволяет освободить вычислительные ресурсы контроллера от наиболее трудоемких задач тригонометрических преобразований.
В микроконтроллере реализован классический алгоритм, позволяющий производить как прямые, так и обратные тригонометрические преобразования [5]. Точность вычисления блока составляет 24 бита, время одного преобразования 30 тактов, при этом микропроцессорные ядра задействуются только для задания входных аргументов исчитываниярезультата.
III. БЛОКИ КОНТРОЛЛЕРОВ АПЦ
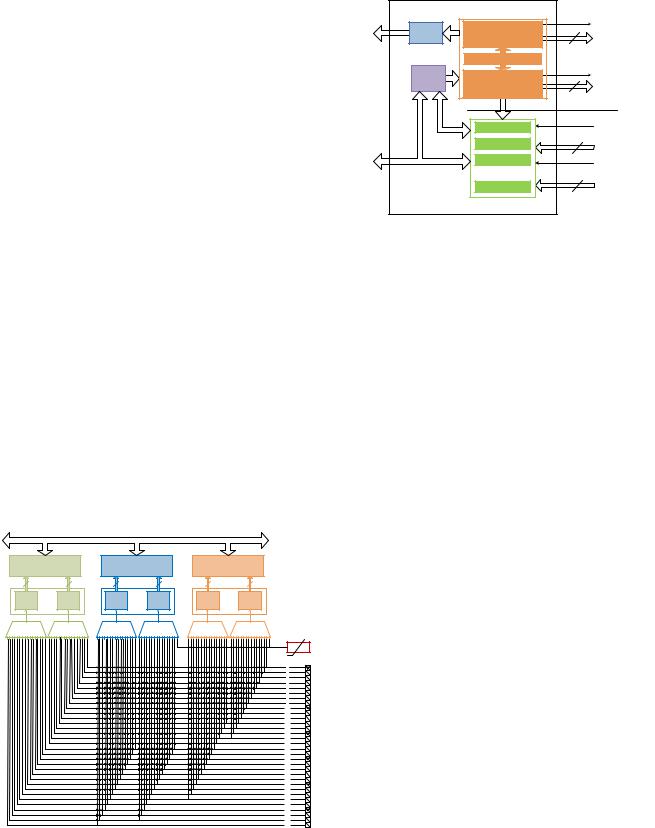
Наиболее важным с точки зрения реализации современных алгоритмов управления частью микроконтроллера является система аналого-цифровых преобразователей. В микроконтроллере реализовано три контроллера АЦП, каждый из которых способен управлять двумя преобразователями, всего шесть независимых ядер двенадцатиразрядных АЦП. На входе каждого из АЦП реализован мультиплексор для выбора одного из шестнадцати независимых сигналов, поступающих с площадок, либо от встроенного термодатчика (рис. 2).
Каждый контроллер АЦП представляет собой программируемую машину последовательного сбора данных (рис. 3). Для этого в каждом контроллере реализовано по автомату последовательности преобразований
|
|
|
|
APB |
|
Контроллер |
Контроллер |
Контроллер |
|||
АЦП3 |
|
|
АЦП2 |
АЦП1 |
|
12 |
12 |
12 |
12 |
12 |
12 |
Ядро |
Ядро |
|
|
|
|
АЦП6 |
АЦП5 |
|
|
|
|
Выбор |
Выбор |
Выбор |
Выбор |
Выбор |
Выбор |
канала |
канала |
канала |
канала |
канала |
канала |
|
|
|
|
|
˚t |
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|
|
8 |
|
|
|
|
|
9 |
|
|
|
|
|
10 |
|
|
|
|
|
11 |
|
|
|
|
|
12 |
|
|
|
|
|
13 |
|
|
|
|
|
14 |
|
|
|
|
|
15 |
|
|
|
|
|
16 |
|
|
|
|
|
17 |
|
|
|
|
|
18 |
|
|
|
|
|
19 |
|
|
|
|
|
20 |
|
|
|
|
|
21 |
|
|
|
|
|
22 |
|
|
|
|
|
23 |
|
|
|
|
|
24 |
|
|
|
|
|
25 |
|
|
|
|
|
26 |
|
|
|
|
|
27 |
|
|
|
|
|
28 |
|
|
|
|
|
29 |
|
|
|
|
|
30 |
|
|
|
|
|
31 |
|
|
|
|
|
32 |
|
|
|
|
|
Аналоговые |
|
|
|
|
|
каналы |
Рис. 2. Структура организации системы аналого-цифровых |
|||||
|
преобразований микроконтроллера |
|
|||
Рис. 3. Структурная схема контроллера управления |
последовательность преобразований АЦП |
для каждого из АЦП, способных запускать последовательности до 32 преобразований с выбором одного из каналов для каждого преобразования. Запуск цепочки преобразований возможно производить как записью в соответствующий регистр, так и по событиям от таймеров либо по внешним событиям.
Возможность синхронизация начала преобразований АЦП с событиями таймеров является важной функциональной особенностью, позволяющей автономно выполнять все необходимые преобразования внутри периода ШИМ.
Результаты преобразований укладываются в 32 регистра результатов, доступных как в табличном режиме, так и в режиме FIFO для организации удобного доступа при помощи DMA.
Между управляющим автоматом АЦП1 и АЦП2 реализована возможна настройка синхронизации, которая позволяет производить операции поочередно, одновременно либо с произвольным сдвигом по фазе преобразований ядер АЦП друг относительно друга. Например, в случае сдвига начала преобразования одного АЦП относительно другого на половину периода преобразований и мультиплицировании при этом одного и того же канала на входы каждого из ядер АЦП можно осуществлять преобразование входного сигнала с удвоенной скоростью.
IV. БЛОКИ ШИРОТНО-ИМПУЛЬСНЫХ МОДУЛЯТОРОВ
Другим важнейшим блоком преобразовательной техники является широтно-импульсный модулятор. В микроконтроллере реализовано 9 блоков контроллеров ШИМ, каждый из которых является двухканальным. Микроконтроллер предоставляет широкие возможности формирования выходов по каждому из каналов как в независимом, так и в комплиментарном режиме (рис. 4). Также в контроллере реализованы аппаратные блоки формирования «мертвой» зоны и высокочастотной модуляции. Выходной каскад аппаратной обработки ошибок может работать в режиме ограничителя тока или аппаратного предохранителя.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 134 -

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа отдельных блоков контроллеров широтно- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
импульсных модуляторов может быть синхронизована |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
между собой посредством настраиваемых сигналов |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
синхронизации. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V. ДРУГИЕ СПЕЦИАЛИЗИРОВННЫЕ БЛОКИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кроме базовых блоков, в контроллере реализованы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
необходимые для построения систем управления блоки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
обработки сигналов датчиков – квадратурный энкодер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и блок захвата. Также реализованы 4 таймера общего |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4. Структурная схема контроллера ШИМ |
назначения, 4 аналоговых компаратора и 4 блока циф- |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ро-аналоговых преобразователя. |
|
Запись в регистры периода и сравнений для кана- |
При этом на вход компаратора можно подать сигнал |
|||||||||||||||||||||||||||||||
лов А и Б осуществляется при помощи буферов FIFO |
с одного из преобразователей, а его выход завести в ка- |
||||||||||||||||||||||||||||||||
с возможностью загрузки значений в регистр как на |
честве сигнала ошибки для широтно-импульсных моду- |
||||||||||||||||||||||||||||||||
каждом такте рабочей частоты ШИМ, так и в конце |
ляторов. Таким образом, возможно формирование на их |
||||||||||||||||||||||||||||||||
периода ШИМ. |
основе аппаратной системы защиты от перенапряжения |
||||||||||||||||||||||||||||||||
|
Предполагается что система управления строится |
внутри микросхемы. |
|||||||||||||||||||||||||||||||
относительно прерывания по завершении цепочки пре- |
ЗАКЛЮЧЕНИЕ |
||||||||||||||||||||||||||||||||
образований АЦП. По сигналу прерывания микрокон- |
|||||||||||||||||||||||||||||||||
троллер считывает полученные значения преобразова- |
В настоящее время разработан и отлажен макет циф- |
||||||||||||||||||||||||||||||||
ний из таблицы результатов, производит вычисления |
ровой части микроконтроллера, и заканчивается разра- |
||||||||||||||||||||||||||||||||
токов для следующего периода ШИМ, рассчитывает |
ботка аналоговых блоков микросхемы, готовится топо- |
||||||||||||||||||||||||||||||||
значение скважности выходных сигналов, заносит их |
логия микросхемы. Запуск микросхемы в производство |
||||||||||||||||||||||||||||||||
в FIFO соответствующих регистров ШИМ и переходит |
запланирован на осень 2016 года. Все реализованные |
||||||||||||||||||||||||||||||||
в режим ожидания следующего цикла. Контроллер |
функции микроконтроллера проверены и подтвердили |
||||||||||||||||||||||||||||||||
ШИМ автоматически подхватит новые значения срав- |
свою эффективность при испытаниях макета в составе |
||||||||||||||||||||||||||||||||
нения в конце текущего периода и в следующем перио- |
системы управления для двигателей различных типов. |
||||||||||||||||||||||||||||||||
де выставит заданную скважность. Далее, по заданному |
|
||||||||||||||||||||||||||||||||
отсчету таймера ШИМ будет инициирована новая це- |
Библиографический список |
||||||||||||||||||||||||||||||||
почка преобразований, по завершении которой будет |
1. Гусев С., Шумилин С., Калачев Ю. Специализированный микро- |
||||||||||||||||||||||||||||||||
выставлено очередное прерывание для ядра, и цикл |
контроллер АО «ПКК Миландр» для реализации алгоритмов век- |
||||||||||||||||||||||||||||||||
начнется заново. В рамках такой организации регули- |
торного управления электроприводами // Электронные компо- |
||||||||||||||||||||||||||||||||
рования процессорные ядра не привязаны к временным |
ненты. 2015. № 10 (1). С. 128–131. |
||||||||||||||||||||||||||||||||
событиям ШИМ, что повышает эффективность и гиб- |
2. Калачев Ю.Н. Векторное регулирование (заметки практика). М.: |
||||||||||||||||||||||||||||||||
кость реализации системы регулирования. |
ЭФО, 2013. 63 с. |
||||||||||||||||||||||||||||||||
3. Казелин П.А., Емашов В.А. Микроконтроллеры для управления |
|||||||||||||||||||||||||||||||||
|
Реализация возможности доступа к регистрам срав- |
электроприводом // Современная наука и практика. 2015. № 1 (1). |
|||||||||||||||||||||||||||||||
нения и периода через FIFO позволяет организовать ра- |
С. 10–19. |
||||||||||||||||||||||||||||||||
боту с блоком как в управляемом режиме, так и в режи- |
4. Козаченко В., Анучин А, Дроздов А, Сигнальные микроконтрол- |
||||||||||||||||||||||||||||||||
ме выдачи периодического сигнала с применением кон- |
леры texas instruments для управления двигателями и автомати- |
||||||||||||||||||||||||||||||||
зации промышленности // Электронные компоненты. 2004. № 7 |
|||||||||||||||||||||||||||||||||
троллера прямого доступа к памяти. |
(60). С. 91–95. |
||||||||||||||||||||||||||||||||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 135 -

УДК 621.313
Асинхронный электропривод с косвенным контролем выходных переменных
Ю.Н. Дементьев, А.Д. Умурзакова, К.Н. Негодин
Национальный исследовательский Томский политехнический университет, Томск, Россия
An asynchronous electric drive
with the indirect control of the output variables
Yu.N. Dementyev, A.D. Umurzakova, K.N. Negodin
National Research Tomsk Polytechnic University,
Tomsk, Russian Federation
Приведено математическое описание асинхронного двигателя с устройством косвенного контроля электромагнитного момента и угловой скорости асинхронного двигателя в электроприводе, позволяющее обосновать на его основе способ контроля выходных переменных асинхронного электродвигателя. Приведена имитационная модель асинхронного электродвигателя с устройством косвенного контроля выходных переменных асинхронного двигателя и основные результаты исследования.
The article gives a mathematical description of an induction motor with a device of indirect control of the electromagnetic torque and the angular velocity of the inductoin motor in the electric drive that allows to prove on its basis the method of monitoring the output variables of the asynchronous electric motor. The simulation model of an induction motor with a device of indirect control of the output variables of the induction motor and the main results of the study have been given.
Ключевые слова: асинхронный двигатель, электропривод, косвенный контроль.
Keywords: induction motor, electric drive, indirect control.
ВВЕДЕНИЕ
Современный асинхронный электропривод (ЭП) общепромышленных механизмов занимает лидирующее положение во всех отраслях промышленности. При эксплуатации современных электроприводов, например насосных агрегатов в системах передачи жидкости (СПЖ) [1], возникает постоянная потребность контроля выходных переменных асинхронного двигателя (АД), который позволяет иметь информацию о технологических выходных параметрах насосных агрегатов, проводить мониторинг загруженности двигателей и поддерживать скорость в заданных пределах.
С развитием полупроводниковой техники появилась реальная возможность регулирования частоты враще-
ния АД для обеспечения требуемых технологических параметров СПЖ.
Применение статических преобразователей частоты позволяет управлять АД насосной станции в соответствии с заданными режимами технологического процесса СПЖ. Кроме того, знание текущих значений параметров и состояния асинхронных двигателей позволяет осуществлять контроль технологического процесса СПЖ и режима работы АД, контролировать его техническое состояние, проводить диагностирование с выявлением на ранних этапах появляющихся дефектов, чтобы вовремя их устранить.
Однако не во всех технологических процессах СПЖ возможно применение для всех насосных агрегатов регулируемых ЭП с преобразователями частоты из-за высокой стоимости и сложности применяемого оборудования, выполненного на полную мощность АД.
Поэтому наиболее целесообразным для СПЖ является использование функциональной схемы (рис. 1), в которой для контроля выходных переменных АД насосных агрегатов при нормальном режиме работы или
Рис. 1. Функциональная схема системы передачи жидкости с одним преобразователем частоты
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 136 -

при выходе из строя основного преобразователя частоты используют устройство косвенного контроля выходных переменных АД (УКК).
На функциональной схеме СПЖ с n последовательно соединенными центробежными насoсными установками (ЦНi) (см. рис. 1): Нi – напор i-й насосной установки (i – 1, 2, …, n), Qi – подача или расход жидкости i-й насосной установки (i – 1, 2, …, n), L – расстояние
Наиболее распространенными в качестве устройств измерения и контроля скорости являются импульсные
итахогенераторные датчики, а момента балансирные
итрансмиссионные динамометры, торсионные приборы
ипреобразовательные установки [3, 4]. С помощью этих устройств возможно контролировать выходные переменные электродвигателя в электроприводе, но они имеют сложную конструкцию и требуют тщательной установки при их сопряжении с вращающимися частями электропривода, что приводит к невысокой надежности в работе
исущественно ухудшает эксплуатационные характеристики электропривода. Кроме того, их использование может быть невозможным по условиям функционирования электропривода. В связи с этим промышленными предприятиями широко востребованы устройства, схемные решения и методы, позволяющие контролировать технологические выходные параметры работающих агрегатов через выходные переменные асинхронного электропривода, поддерживать скорость в заданных пределах при отсутствии датчиков скорости и момента, когда необходимая информация контролируется косвенными методами, напримерустройствомкосвенногоконтроля.
Таким образом, разработка и исследование асинхронного электропривода с УКК выходных переменных АД является актуальной и позволяет контролировать выходные переменные, обеспечивая заданные технологические параметры.
I. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Для математического описания косвенного контроля электромагнитного момента и угловой скорости, можно воспользоваться выражениями, приведенными в [5].
Математические выражения для косвенного определения выходных переменных асинхронного электродвигателя электромагнитного момента и угловой скорости [9–12], могут быть представлены следующей системой уравнений:
|
М(t) = 3pn (ia (t) (ub (t) − Rsib (t))dt − ib (t) (ua (t) − Rsia (t))dt), |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|||
ω(t) = ωи(t) 1 |
+ Δωинт (t) + Δωдиф(t) |
|
||||
|
|
|
|
|
|
|
где |
|
|
ωи (t ) = |
|
|
|
|
|
|
|
|
|
|
|
|
3[ u |
а |
(t) − (R + R′ |
)i (t)] |
|
|
|
|
s |
rα |
а |
|
= (Rs [iа (t) + 2ib (t)]− [uа (t) + 2 ub (t)])dt − Lβ [iа (t) + ib (t)]
– измеренное мгновенное значение угловой скорости;
Δωинт (t ) = |
|
|
[ua (t) − Rs ia (t)]dt |
– |
динамическая |
||||||
T' |
ua(t) − |
(Rs+Rr′α) ia(t) |
|||||||||
|
|
r |
|
|
|
|
|
|
|
||
интегральная |
составляющая |
относительного значения |
|||||||||
угловой скорости; |
|
|
|
|
|
|
|||||
|
|
|
|
Lβ |
dia (t) |
|
|
|
|
|
|
Δωдиф (t ) = |
|
|
|
dt |
|
|
– |
динамическая |
|||
u |
a |
(t) − (R |
+ R′ |
)i (t) |
|||||||
|
|
|
|
s |
ra |
a |
|
|
|||
дифференциальная составляющая относительного значения угловой скорости;
R′ |
= R′ α – активное приведенное сопротивление |
||
rα |
|
|
r |
обмотки ротора с учетом коэффициента α; |
|||
R′ |
– активное приведенное сопротивление ротора; |
||
r |
|
|
|
α = |
LS |
– коэффициент, равный отношению полной |
|
|
|||
|
|
L′ |
|
|
|
r |
|
индуктивности обмотки статора Ls к приведенной пол- |
|||||
ной индуктивности обмотки ротора Lr′ ; |
|||||
L = |
L |
β− L – |
индуктивность с учетом коэффици- |
||
β |
μ |
s |
|||
ента β ; |
|
|
|
|
|
Lμ – |
взаимная |
индуктивность обмоток статора |
|||
и ротора; |
|
|
|||
β = |
Lμ |
− |
– коэффициент, равный отношению взаим- |
||
|
|||||
|
L′ |
|
|
||
|
|
r |
|
|
|
ной индуктивности Lμ к приведенной полной индуктив- |
|||||
ности обмотки ротора Lr′ ; |
|||||
Tr′ = |
L′ |
– постоянная времени ротора. |
|||
R′ |
|||||
|
|
r |
|
|
|
r
По вышеприведенным уравнениям можно определить выходные переменные асинхронного электродвигателя путем измерения напряжений, токов фаз статора и данных электродвигателя для контроля их текущих значений.
II. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
На основе вышеприведенного математического описания на рис. 2 в программном пакете MatLab составлена имитационная модель асинхронного электродвигателя с устройством косвенного контроля выходных переменных асинхронного двигателя, позволяющая провести исследования асинхронного электропривода при частотном скалярном управлении без учета ШИМ напряжения питания двигателя.
В состав имитационной модели входят суперблоки: модель асинхронного электродвигателя выполнена на основе математического описания асинхронного двигателя (AD); формирователь фазных напряжений статорных обмоток в трехфазной системе координат (U); инерционная масса (In_massa); устройство косвенного контроля электромагнитного момента асинхронного электродвигателя (UKK); устройство сравнения полученных значений электромагнитного момента асинхронного электродвигателя и устройства косвенного контроля (model sravnenia).
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 137 -

Рис. 2. Имитационная модель асинхронного электродвигателя |
с устройством косвенного контроля |
На рис. 3–5 представлены результаты имитационных |
исследований асинхронного двигателя (АИР90L4) при |
различных значениях нагрузки в виде зависимостей со- |
ответственно тока, скорости и момента от времени I (t), |
ω(t) , M(t), которые получены с асинхронного двигателя |
и устройства косвенного контроля при частотном ска- |
лярном управлении асинхронным электродвигателем без |
учета ШИМ напряжения питания двигателя. |
Рис. 3. Зависимости тока I (t), момента M (t), угловой |
скорости ω(t) (f = 50 Гц, Мс = 10Нм) |
ω, рад/с |
М, Нм 160 |
I1ф, A |
140 |
ω(t)
120 |
|
|
|
|
|
|
|
М(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1ф(t) |
|
|
100 |
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
-200 |
0.05 |
0.1 |
0.15 |
0.2 |
0.25 |
0.3 |
0.35 |
0.4 |
0.45 |
0.5 |
|
|
|
|
t , c |
|
|
|
|
|
|
Рис. 4. Зависимости тока I (t), момента M (t), угловой скорости ω(t) (f = 50 Гц, МС = 2Нм)
ω, рад/с |
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
ω(t) |
|
50 |
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
-100 |
0.05 |
0.1 |
0.15 |
0.2 |
0.25 |
0.3 |
0.35 |
0.4 |
0.45 |
0.5 |
Рис. 5. Зависимости тока I (t), момента M (t), угловой скорости ω(t) (f = 25 Гц, МС = 15 Нм)
Из приведенных характеристик следует, что зависимости электромагнитного момента и угловой скорости, полученные с выхода асинхронного двигателя и устройства косвенного контроля, имеют сходимость, допустимую в инженерных расчетах.
III. РЕЗУЛЬТАТЫ
Для оценки результатов контроля выходных переменных АД в блоке сравнения имитационной модели определяются абсолютная и относительная погрешности контроля электромагнитного момента и угловой скорости, полученные с АД и с УКК, а их значения сведены в таблицу.
Абсолютная и относительная погрешности контроля электромагнитного момента и угловой скорости
Абсолютнаяпогрешность |
Относительнаяпогрешность, % |
||
ΔΜ , |
ω , рад/с |
–2 |
δω |
10–4, Μ н |
δМ , 10 |
||
–0,004…0,003 |
–12…12 |
–0,1…0,1 |
–8…+8 |
Как видно из таблицы, относительная погрешность контроля электромагнитного момента составляет менее 1 %, а угловой скорости не более 10 % из-за наличия корректирующего звена в блоке вычисления скорости.
ВЫВОДЫ
Результаты моделирования, полученные при исследовании асинхронного электропривода с устройством косвенного контроля, подтверждают корректность математического описания асинхронного двигателя с устройством косвенного контроля выходных переменных.
Исследованиями, проведенными на моделях асинхронного электродвигателя с устройством косвенного контроля, установлено, что применение УКК в асинхронном электроприводе позволяет осуществлять непрерывный контроль электромагнитного момента и угловой скорости и подтверждает высокую эффективность применения устройства косвенного контроля для электроприводов общепромышленных механизмов, осуществляющих технологический процесс и требующих контроля его параметров.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 138 -
Библиографический список
1.Лезнов Б.С., Энергосбережение и регулируемый привод в насосных установках. М.: Энергоатомиздат, 2006. 360 с.
2.Галеев В.Б., Харламенко В.И. Магистральные нефтепродуктопроводы. М.: Недра, 1988. 295 с.
3.Рыбальченко Ю.И. Магнитоупругие датчики крутящего момента. М.: Машиностроение, 1981. 128 с.
4.Лейтман М.Б. Автоматическое измерение выходных параметров электродвигателей. М.: Энергоатомиздат, 1983. 152 с.
5.Дементьев Ю.Н., Арсентьев О.В. Измерение механических координат двигателя в асинхронном электроприводе // Вестн. Иркут.
гос. техн. ун-та. 2013. № 7. С. 127–132.
6.Способ измерения угловой скорости вращения трехфазного асинхронного электродвигателя: пат. РФ № 2525604 / Дементьев Ю.Н., Умурзакова А.Д., Мельников В.Ю., бюл. № 23. 20.08.2014.
7.Payuk L.A., Voronina N.A., Galtseva O.V. Radiation-Thermal Effects and Processes in Inorganic Materials // Journal of Physics: Conference Series 012044. Available: http: //dx.doi.org/10.1088/1742-6596/671/1/012044.
8.Дементьев Ю.Н., Умурзакова А.Д., Хацевский К.В. Алгоритм и способ измерения угловой скорости вращения двигателя в асинхронном электроприводе // Динамика систем, механизмов и ма-
шин. 2014. № 1. С. 393–396.
9.Дементьев Ю.Н., Умурзакова А.Д. Алгоритм контроля угловой скорости двигателя в асинхронном электроприводе // Научные
проблемы транспорта Сибири и Дальнего Востока. 2013. № 1.
С. 270–272.
10. Дементьев Ю.Н., Умурзакова А.Д., Удут Л.С Моделирование асинхронного двигателя с устройством косвенного измерения момента // Фундаментальные исследования. 2014. № 12. С. 931–935.
11.Dementyev Yu.N., Umurzakova A.D. The engine mechanical coordinates measuring in the asynchronous motor. MATEC Web of Conferences 19, 010027. DOI: 10.1051/matecconf/20141901027. Available: http: //dx.doi.org/10.1051/matecconf/20141901027
12.Устройство для измерения крутящего момента трехфазного асинхронного электродвигателя: пат. РФ № 131874 / Дементьев Ю.Н.,
Умурзакова А.Д., бюл. 24. 27.08.2013.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 139 -
УДК 62-503.4
Синтез и анализ схемы наблюдателя скорости двигателя постоянного тока
В.И. Доманов, А.В. Доманов, Аббас А. Карим Альтахер
Ульяновский государственный технический университет, Ульяновск, Россия
Synthesis and analysis of the DC motor speed observer scheme
V.I. Domanov, A.V. Domanov, Abbas A. Karim Altaher
Ulyanovsk State Technical Univercity,
Ulyanovsk, Russian Federation
Рассмотрена схема наблюдателя скорости двигателя постоянного тока. Получены передаточные функции для ошибок наблюдателя по задающему воздействию и возмущению. Определены оптимальные параметры корректирующего звена. Выполнено моделирование работы схемы наблюдателя при управляющем и возмущающем воздействиях. Проведен анализ схемы и получены функции чувствительности передаточной функции к ее звеньям.
Considered scheme of the speed observer of the DC motor. Obtained transfer functions for the observer error for a given exposure and disturbance. Identified optimum parameters of the correction element. The modeling work of the observer scheme for the control and disturbance. The analysis of the scheme and obtained sensitivity function of the transfer function to its links.
Ключевые слова: двигатель, наблюдатель, ошибка, корректирующее звено, моделирование, вариации параметров, функция чувствительности.
Keywords: engine, observer, error correction unit, simulation, variation of parameters, sensitivity function.
В настоящее время активно развиваются «бездатчиковые» системы управления электроприводами. Их отличительной особенностью является отсутствие (минимизация числа) датчиков, измеряющих механические координаты: тахогенераторов, датчиков момента и др. [1, 2]. Эти координаты, необходимые для построения системы электропривода, вычисляются наблюдающими устройствами (НУ) по электрическим координатам двигателя – току и напряжению. При этом подразумевается, что параметры неизменяемой части электропривода (коэффициенты передачи, сопротивления, индуктивности и др.) известны. На основе этой информации формируется схема НУ, в основе которой лежит модель неизменяемой части электропривода, работающая в реальном времени [3, 4]. Особенностью этой модели является
наличие корректирующих связей с реальными доступными координатами электропривода (ток, напряжение) для ее оперативной подстройки под текущее состояние системы.
Рассмотрим работу наблюдателя скорости для двигателя постоянного тока (ДПТ). Известны различные схемы, позволяющие получить сигнал, пропорциональный скорости ДПТ: контроль напряжения якоря, схема тахометрического моста и др. Их общим недостатком является наличие погрешности, связанное с изменением значений параметров двигателя (коэффициенты передачи, сопротивление цепей) в процессе работы. Схема на основе НУ не имеет этих недостатков.
Считаем, что доступными координатами электропривода являются напряжение якорной цепи Uя и ток Iя. Ток якоря практически контролируется всегда и используется для защиты электропривода от перегрузки (токоограничение) икак дополнительная обратная связь в системе управления ДПТ. Структура наблюдателя приведена на рис. 1. Объект (ДПТ) представлен звеньями W1 (p) и W2 (p), которые ха-
рактеризуютсяпередаточнымифункциями
W1 |
(p) = |
1/ Rя |
|
; |
W2 |
(p) = |
1 |
, |
(1) |
|
T p + 1 |
Jp |
|||||||||
|
|
|
|
|
|
|
||||
|
|
я |
|
|
|
|
|
|
||
где Rя – сопротивление якорной цепи; Tя – постоянная времени, J – момент инерции.
На звено объекта W1 (p) поступают два сигнала: на-
пряжение якорной цепи Uя и ЭДС Eя. Схема наблюдателя содержит модель объекта W1′(p) , узел сравнения Σ1
и цепь настройки W3 (p) . Параметры звена W1′(p) выбираются из условия
W1′(p) = W1 (p) . |
(2) |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 140 -