

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfподтвердили эффективность данного метода коррекции характеристик бездатчикового электропривода. Несмотря на положительные результаты экспериментов, использование в промышленном электроприводе аналоговых узлов нежелательно по различным причинам. Кроме того, фирмы производители промышленного оборудования не предусматривают работу преобразователей частоты с такими узлами. Учитывая вышесказанное, было принято решение о целесообразности замены аналоговых схем программируемым логическим контроллером (ПЛК), того же производителя, что и преобразователь частоты, а именно Schneider Electric. В связи с тем что, как правило, в промышленных установках управление преобразователями частоты осуществляется уже с применением ПЛК, реализация данной схемы не требует капитальных затрат, связанных с закупкой дополнительного оборудования. Для решения поставленной задачи использован контроллер Modicon М241 (ТМ241CE24T).
Программируемый логический контроллер Modicon M241 предназначен для высокопроизводительных компактных машин с функциями управления скоростью перемещения и позиционированием. В нем имеются встроенные в последовательных порта Modbus и CANopen, порт USB для программирования, высокоскоростные счетчики и импульсные выходы для управления двигателем. Контроллер имеет 14 дискретных входов включая 8 высокоскоростных. К нему можно подключить до трех дополнительных модулей, предназначенных для расширения его возможностей (дополнительные дискретные входы и выходы; аналоговые входы и выходы и т.д.).
На рис. 2 приведена принципиальная электрическая схема электропривода с положительной обратной связью по току статора, реализуемой на программируемом логическом контроллере по шине Modbus.
Программирование логического контроллера Modicon M241 осуществлялось при помощи программного обеспечения SoMachine на языке лестничных диаграмм. На рис. 3 представлен фрагмент программы управления электроприводом, а также формирования управляющего сигнала коррекции.
Рис. 3. Фрагмент программы формирования управляющего сигнала коррекции
II.РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТОВ
Входе экспериментов осуществлялись следующие режимы: разгон до 20, 30 и 40 Гц, наброс активной на-
грузки включением электродвигателя во встречном направлении через 2,5 с и отключение коррекции через 6 с. Регистрировались скорость вращения двигателя с помощью установленного на общий вал энкодера и ток статора, измеренного преобразователем частоты. Параметры реакции привода приведены в таблице.
Параметры реакции привода
Fзад |
|
сОС |
|
безОС |
||
Δω1,% |
Δω3,% |
iст1,% |
Δω2,% |
iст2, % |
||
|
||||||
20 |
–2,75 |
10 |
20,42 |
32,6 |
28,26 |
|
30 |
0 |
6,67 |
12,24 |
14,8 |
13,23 |
|
40 |
+1,375 |
4,5 |
10,65 |
9 |
10,65 |
|
30* |
1,67 |
40 |
– |
|
– |
|
Эксперименты показали, что использование внешней положительной обратной связи по току статора позволяет в значительной мере снизить (рис. 4), а в некоторых случаях и полностью исключить (рис. 5) статическую ошибку скорости при набросенагрузки.
Кроме того, наблюдается снижение тока статора под нагрузкой (iст1 < iст2), что положительно влияет на эксплуатационные и экономические показатели привода.
Для сравнения, на рис. 6 и в строке 4 таблицы приведены параметры реакции замкнутого по скорости привода на наброс и сброс нагрузки. Несмотря на то, что ста-
|
Рис. 4. Осциллограммы скорости и тока статора при установившейся |
Рис. 2. Принципиальная электрическая схема привода |
скорости 60 р/с (задание 20 Гц) во время наброса нагрузки при |
с положительной обратной связью, реализованной на ПЛК |
включенной и отключенной положительной обратной связью (ПОС) |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 121 -

Рис. 5. Осциллограммы скорости и тока статора при установившейся скорости 90 р/с (задание 30 Гц) во время наброса нагрузки при включенной и отключенной положительной обратной
связью (ПОС)
оборудования (энкодер, плата расширения в преобразователь частоты), что технически не всегда возможно.
ВЫВОДЫ
Экспериментальные исследования подтвердили полученные ранее теоретические положения и результаты моделирования процессов отработки динамических моментных возмущений в асинхронных приводах. Анализ диаграмм скорости показал лучшую эффективность динамической положительной обратной связи по току статора в асинхронных электроприводах с частотным управлением, по сравнению с традиционными регуляторами скорости исполнительного двигателя электропривода.
|
Библиографический список |
||
1. |
Кодкин В.Л., Немков В.Л., Аникин А.С. Особенности частотного |
||
|
управления асинхронным электроприводом с преобразователем |
||
|
частоты и напряжения фирмы «Schneider Electric» ATV71 // |
||
|
Наука ЮУрГУ: материалы 62-й науч. конф. Секции технических |
||
|
наук. Челябинск: Изд-во ЮУрГУ, 2010. Т. 3. С. 103–107. |
||
2. |
Кодкин В.Л., Аникин А.С., Мальчер М.А. Проблемы внедре- |
||
|
ния частотного регулирования в горно-добывающей отрасли // |
||
|
Вестн. ЮУрГУ. Серия «Энергетика». 2012. Вып. 18. № 37 (296). |
||
|
С. 67–71. |
|
|
3. |
Аникин А.С., Кодкин В.Л., |
Балденков А.А. Динамическая поло- |
|
Рис. 6. Параметры реакции замкнутого по скорости |
жительная обратная связь |
в асинхронных электроприводах |
|
с частотным управлением // |
Приоритеты мировой науки: экспе- |
||
привода на наброс и сброс нагрузки |
|||
римент и научная дискуссия: материалы VIII Междунар. науч. |
|||
|
|||
тическая ошибка стремится к нулю, скачки скорости при |
конф. 17–18 июня 2015 г. Ч. 1. Естественные и технические науки. |
||
North Charleston, SC, USA: CreateSpace, 2015. С. 119–123. |
|||
набросе (Δω1) и сбросе нагрузки значительно превыша- 4. |
Балденков А.А., Кодкин В.Л., Логинова Н.А. Экспериментальные |
||
ют аналогичные значения в системе с положительной |
исследования асинхронных электроприводов с частотным управ- |
||
обратной связью, а также время переходного процесса |
лением. Неустойчивость векторного управления // Приоритеты |
||
в замкнутой по скорости системе в 2–3 раза больше. |
мировой науки: эксперимент научная дискуссия: материалы |
||
VIII Междунар. науч. конф. 17–18 июня 2015 г. Ч. 1. Естествен- |
|||
Следует также отметить, что для замкнутой по ско- |
ные и технические науки. North Charleston, SC, USA: CreateSpace, |
||
рости системынеобходима установка дополнительного |
2015. С. 124–127. |
|
|
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 122 -
УДК 62-83
Методика настройки измерительных каналов высококачественного электропривода переменного тока
Н.Е. Гнездов |
А.Б. Виноградов, Н.А. Глебов, С.В. Журавлев |
Ивановскийгосударственныйэнергетическийуниверситет |
ПАО«НИПТИЭМ», |
имениВ.И. Ленина, Иваново, Россия |
Владимир, Россия |
Мeasuring channels calibration for high quality ac electric drive
N.Е. Gnezdov
Ivanovo State Power Engineering University,
Ivanovo, Russian Federation
Высокая точность каналов измерения или вычисления напряжений, токов, скорости является обязательным условием достижения высокого качества регулируемых параметров электропривода. Представленная методика настройки позволяет получить погрешности измерения напряжения в звене постоянного тока и фазных токов менее 1 % от их значения, а также погрешность измерения скорости менее 0,01 номинального скольжения при малом (120–180) количестве меток датчика. Предложенный алгоритм и методика настройки пофазной компенсации «мертвого» времени обеспечивает высокую точность формирования напряжения статора, в том числе на уровне 1 % его номинального значения. В результате обеспечена погрешность вычисления электромагнитного момента не более 5 % во всех рабочих режимах электропривода, в том числе во 2-й и 3-й зоне регулирования скорости.
High accuracy of measuring or calculating channels of voltage, current, speed is compulsory condition for high quality control of electric drive parameters. The calibration methods allow to get less than 1 % measuring errors of dc link voltage, phase current and speed measuring error less than 1 % of rated slip at small number (120–180) of encoder labels. The introduced algorithm and adjustment technique of segre- gated-phase dead time compensation provide high accuracy of stator voltage formation, including at level of 1 % its nominal value. As a result errors of torque calculation no more than 5 % in all operating modes of electric drive, including 2-nd and 3-d speed control ranges, is provided.
Ключевые слова: электропривод, настройка каналов измерения, коррекция ошибок, калибровка датчиков, компенсация мертвого времени.
Keywords: electric drive, measuring channels calibration, error correction, sensor calibration, dead time compensation.
A.B. Vinogradov, N.А. Glebov, S.V. Zshuravlev
NIPTIEM Public Joint-stock Company,
Vladimir, Russian Federation
ВВЕДЕНИЕ
Высокое качество регулирования переменных является обязательным требованием к современным станочным, тяговым, следящим, специального применения электроприводам. Это подразумевает как высокую точность формирования напряжения, момента, скорости, так и соблюдение определенной формы сигналов: синусоидальность формируемых токов, напряжений, в том числе при их малых значениях. Очевидно, что достичь этого невозможно без высокой точности каналов измерения токов, напряжений, момента, скорости. Обязательной также является компенсация динамических неидеальностей («мертвого» времени) ключей силового преобразователя [1–3].
Например, важным условием работоспособности оптимальной по потерям векторной системы управления с идентификатором параметров [4] является низкая, не более 1 % погрешность измерительных каналов. Для этого разработана методика настройки, включающая следующие этапы:
♦калибровка и компенсация температурного дрейфа каналов используемого аналого-цифрового преобразователя (АЦП);
♦калибровка каналов измерения мгновенных фазных токов двигателя;
♦калибровка канала измерения напряжения в звене постоянного тока силового преобразователя;
♦проверка канала измерения скорости двигателя;
♦компенсация динамических неидеальностей («мертвого» времени) ключей силового преобразователя (СП).
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 123 -

I. КАЛИБРОВКА АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЯ
Согласно заявлениям производителей, погрешности коэффициента преобразования АЦП могут достигать ±5 % от максимального значения на его входе, а смещение канала – 2 % [5]. В совокупности это дает ошибку до ±6,9 % при значениях, близких к максимальным. Неучет этого приводит к перегрузке либо недоиспользованию СП, погрешностям в регулируемых переменных.
Для устранения указанных ошибок следует выполнять калибровку каналов АЦП. Методика калибровки заключается в измерении двух известных эталонных напряжений, заведенных на АЦП, и вычислении на их основе реальных коэффициента преобразования и смещения [5, 6]. Это возможно благодаря малой заявленной ошибке измерения одного сигнала разными каналами – не более 0,2 %. Этой же величиной ограничена и достижимая точность калибровки. Для некоторых моделей микроконтроллеров такую калибровку выполняют на фабрике-производителе.
Необходимо также учитывать и температурный дрейф параметров АЦП. При питании от внутреннего источника опорного напряжения погрешность коэффициента преобразования может составлять 0,005 % на 1 °С [6], при питании от внешнего источника – максимум 0,0075 % на 1°С. Таким образом, при изменении температуры на 40°С погрешность становится сопоставимой с достигаемой точностью калибровки – 0,2 %. Смещение может изменяться на величину до двух младших разрядов (LSB). Для минимизации негативного влияния погрешностей АЦП следует выполнять процедуру его калибровки при изменении температуры микроконтроллера, например, на 10°С.
II. КАЛИБРОВКА КАНАЛОВ ИЗМЕРИТЕЛЯ ТОКОВ
Перед началом калибровки следует оценить шумы
визмерительных каналах и принять меры к их снижению. При экспериментальном применении методики
втяговых проектах [7, 8] имел место уровень шумов 1–2 % от номинальных значений токов, напряжений.
Каналы измерения фазных токов настраиваются в два этапа: 1) устранение дрейфа нуля при нулевом токе; 2) калибровка канала измерения фазного тока в режиме «неподвижного» вектора по внешнему прибору с погрешностью не более 1 %. Для устранения дрейфа нуля в программе контроллера силового преобразователя (ПО КСП) реализованы компенсация смещения датчиков тока при инициализации контроллера и компенсация девиаций напряжения смещения канала, соответствующего нулевому значению тока, непосредственно во время работы.
Для калибровки канала выполняется итерационная процедура измерений фазного тока тестируемым и эталонным датчиками для ряда значений во всем рабочем диапазоне и определение коэффициентов коррекции на каждом шаге:
Icorr1 |
= Imeas |
kcorr1 |
+ koff 1 |
, |
(1) |
|
Icorr 2 |
= Icorr1 kcorr 2 + koff 2 и тд. ., |
|||||
|
||||||
где kcorr – коэффициент умножения измеренного значения тока, повышающий точность в основном в верхнем диапазоне измерений; koff – коэффициент смещения, повышающий точность внизу диапазона измерений тока.
Установлено, что в СП SKAI-1, SKAI-2 и SKiiP 4-го поколения (Semikron) погрешность каналов измерения тока гиперболически нарастает и внизу рабочего диапазона привода достигает 12, а в некоторых фазах и 18 % от измеряемого значения (рис. 1). В качестве эталона применялись датчики тока LEM, поверенные калибровочным шунтом, имеющим сертификат государственной службы метрологии. Коэффициенты коррекции, полученные для указанныхСП, представленывтаблице.
Рис. 1. Погрешность датчиков тока SKAI-2 до (а) и после (б) коррекции измерений
Коэффициенты коррекции каналов измерения тока для преобразователей фирмы Semikron
Коэффициенты |
SKAI-1 |
SKAI-2 |
SKiiP |
kcorr |
0,98–1,02 |
0,89–0,91 |
0,98–0,99 |
koff |
0,4–5,0 А |
0,1–3,0 А |
0,5–2,5 А |
III.КАЛИБРОВКА КАНАЛА ИЗМЕРЕНИЯ НАПРЯЖЕНИЯ
ВЗВЕНЕ ПОСТОЯННОГО ТОКА
Канал измерения напряжения в звене постоянного тока СП имеет, как правило, приемлемую точность (рис. 2). Калибровка требуется лишь для сближения показаний в разных СП, например, приводов моторгенератора, левого и правого бортов гусеничного трактора [8]. Для этого вводится поправочный коэффициент, на который умножается оцифрованный сигнал напряжения. Коэффициент определяется экспериментально по показаниям внешнего поверенного вольтметра на рабо-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 124 -
а
б
Рис. 2. Абсолютная (а) и относительная (б) погрешность датчика напряжения в ЗПТ привода мотор-генератора гусеничного трактора
чем уровне напряжения и составляет обычно не более 2 % отэтогоуровня.
IV. ПРОВЕРКА КАНАЛА ИЗМЕРЕНИЯ СКОРОСТИ ДВИГАТЕЛЯ
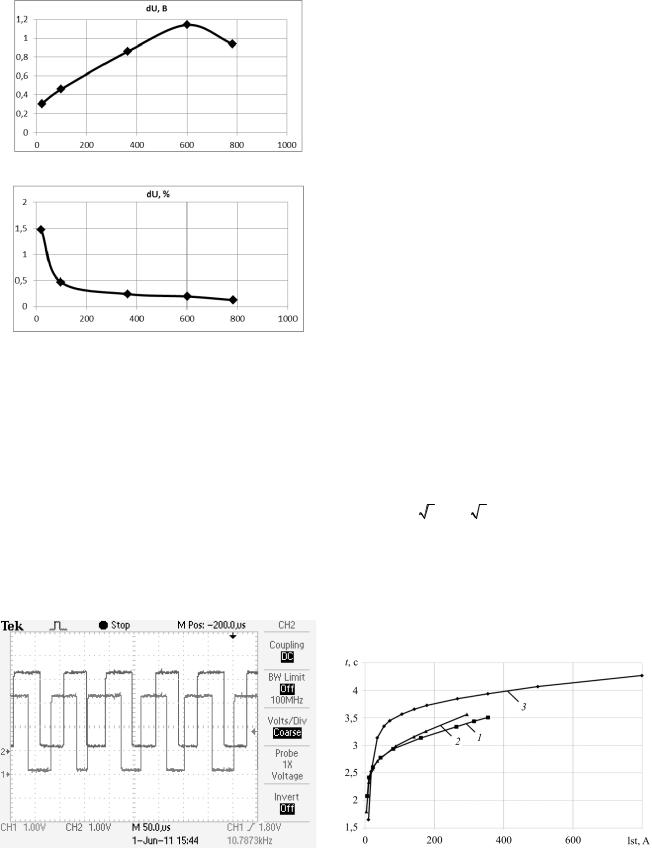
Для оценки канала измерения скорости двигателя проверяется крутизна фронтов, фазовый сдвиг квадратурных последовательностей и отсутствие пропуска импульсов в его сигнале во всем диапазоне скоростей. Как правило, указанные проблемы (рис. 3) являются следствием неправильной установки датчика скорости или влияния электромагнитных помех на его кабель.
После получения требуемой формы сигналов оценивается точность вычисления среднего значения скорости в нескольких точках скоростного диапазона работы привода. Приемлемой считается ошибка менее 0,01 номинального скольжения. Так как одной из причин ошибки могут являться помехи в канале, то точность измерения скорости проверяется как на холостом ходу, так и при работе с максимальными нагрузками.
V. КОМПЕНСАЦИЯ ДИНАМИЧЕСКИХ НЕИДЕАЛЬНОСТЕЙ СИЛОВЫХ КЛЮЧЕЙ
Несмотря на небольшое значение длительности «мертвого» времени, например в SKAI-1, SKAI-2 и SKiiP оно составляет 2–4 микросекунды (рис. 4), отсутствие его компенсации вносит неприемлемую погрешность в формируемый вектор напряжения статора и ограничивает его предельные значения. Существует два подхода к решению этой проблемы: коррекция времен переключения сигналов управления ключами и коррекция значения вектора заданного напряжения [1–3, 9–11]. В отличие от известных алгоритмов предлагаемая пофазная компенсация «мертвого» времени учитывает не только положение вектора напряжения на диаграмме напряжений и знак тока, но и реально существующую зависимость величины «мертвого» времени от мгновенного значения тока каждой фазы. Вектор компенсации задержек, добавляемый к вектору заданного напряжения, в этом случае вычисляется по формуле
|
|
U |
zα |
|
|
2Udc |
|
Uz |
= |
|
|
= − |
× |
||
Uzβ |
|
||||||
|
|
|
|
3T0 |
|||
1 |
1/ 2 |
|
1/ 2 |
Sgn(Ia )tk (Ia ) |
(2) |
|
|
|
|
|
|||
× |
|
|
|
|
, |
|
3 / 2 |
− |
|
Sgn(Ib )tk |
(Ib ) |
||
0 |
3 / 2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Sgn(Ic )tk |
(Ic ) |
|
где Uzβ – компоненты вектора компенсации вортогональной неподвижной системе координат (α, β); T0 – период модуляции; Udc – входное напряжение инвертора; Sgn (Ia), Sgn (Ib), Sgn (Ic) – знаки фазных токов,
принимающие значения ±1; tk (Iphase) – параметр компенсации задержек инвертора, являющийся функцией
мгновенного значения тока фазы.
Рис. 3. Непостоянство ширины импульсов и совпадение фронтов |
Рис. 4. Зависимость величины «мертвого» времени от тока статора |
последовательностей энкодера при скорости 3650 об/мин |
при частоте ШИМ 4 кГц для SKAI-1 (1), SKAI-2 (2) и SKiiP (3) |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 125 -

Анализ алгоритма пофазной компенсации «мертвого» времени в сравнении с другими алгоритмами – с постоянными значениями компенсируемых задержек
икомпенсации задержек в зависимости от модуля вектора тока статора [12] показал, что
♦наибольший эффект достигается в снижении действующего значения пульсаций амплитуды вектора эквивалентного (усредненного на периоде ШИМ) выходного напряжения, взятого относительно амплитуды этого напряжения δUpuls, % (рис. 5). Следовательно, пульсаций
идругих переменных привода также меньше;
♦алгоритм пофазной компенсации является наиболее точным по критерию относительного отклонения среднего значения выходного напряжения от его задан-
ного значения δUm, % (рис. 6).
Настройка пофазной компенсации «мертвого» времени заключается в экспериментальном определении
зависимости tk (Iphase). Для этого на рабочей частоте ШИМ формируют неподвижный вектор напряжения
статора с заданной амплитудой Uz и фазой 30°. При этом получается режим работы противолежащей фазы с нулевым током при ненулевых токах в двух других фазах. Изменением задания tk в реализованном в ПО КСП алгоритме (2) добиваются совпадения заданного и реального Uz. Амплитуду реального напряжения можно рассчитать, например, на основе двух измеренных линейных напряжений. Найденные значения tk1 и Ist1 заносят в таблицу зависимости tk 30 (Ist). Процедура повторяется для 7–10 точек в диапазоне 0,01–1,0 номинального тока
Рис. 5. Относительная амплитуда пульсаций выходного напряжения: 1 – компенсация «мертвого» времени не используется; 2 – алгоритм пофазной компенсации; 3 – алгоритм компенсации с постоянным
значением tk; 4 – алгоритм компенсации с зависимостью tk ( Ist )
при фазе вектора напряжения 30°, 150°, 270°. Усреднив полученные зависимости, и экстраполировав ее на весь диапазон токов, находят искомую tk(Iphase). Экспериментальные исследования показали, что
♦ отличие tk_30(Ist), tk 150(Ist), tk 270(Ist) друг от друга не превышает 3–4 % на уровне 0,01Inom и снижается до
0,2 % при 1,0 Inom;
♦ подробного исследования требует начальный уча-
сток зависимости – до 0,2 Inom (см. рис. 4).
Проверка действия компенсации «мертвого» времени выполняется в режиме ручного задания гармонического напряжения с амплитудой в единицы В и частотой в десятые доли Гц. Так, для привода тягового асинхронного двигателя проекта ЭТ-160Г [3] Uz = 2,0 В
и fz = 0,5 Гц (рис. 7).
После введения компенсации «мертвого» времени канал формирования напряжения статора тестируется в штатном режиме работы привода путем сравнения вычисленного и измеренного эталонным датчиком напряжений во всем диапазоне его изменения. В случае превышения погрешностью порогового значения следует корректировать применяемый алгоритм ШИМ. В тяговых электроприводах проектов ЭТ-300, ЭТ-160Г, БелАЗ-240 удалось добиться погрешности напряжения статора менее 1 %.
Наблюдаемые на рис. 7 небольшие искажения формы фазных токов в области их перехода через ноль
Рис. 6. Отклонения среднего значения выходного напряжения |
Рис. 7. Осциллограммы токов статора до (а) и после (б) |
от его заданного значения при разных алгоритмах компенсации |
|
«мертвого» времени |
применения пофазной компенсации «мертвого» времени |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 126 -
обусловлены влиянием шумов в сигналах измерения тока и наличием зоны прерывистых токов. Как показали проведенные исследования указанных эффектов:
♦при высоких частотах ШИМ и низких уровнях помех искажения, вызванные этими эффектами пренебрежимо малы;
♦при необходимости снизить влияние данных эффектов следует применять дополнительные алгоритмы фильтрации измеряемых токов и алгоритмы коррекции вычислений в зоне прерывистых токов. В частности,
вмомент перехода тока через ноль в любой фазе делается дополнительная корректировка управляющих сигналов, учитывающая скачкообразное изменение напряжения в момент перехода. В подавляющем большинстве практических применений данные алгоритмические дополнения нецелесообразны так как не приносят ощутимого эффекта в качестве регулирования координат.
ЗАКЛЮЧЕНИЕ
Применение представленной методики в общепромышленных и тяговых электроприводах обеспечило погрешность измерения токов статора и напряжения в ЗПТ СП менее 1 %, погрешность вычисления напряжения статора менее 1 %, погрешность измерения скорости ротора менее 0,01 номинального скольжения во всем диапазоне изменения переменных. Совместно с рассмотренными в [4, 12] новыми алгоритмами опти- мально-векторного управления, адаптации и идентификации параметров и переменных это позволило добиться требуемых показателей качества работы электроприводов. В частности, погрешность вычисления электромагнитного момента не превышает 5 % от текущего значения во всех рабочих режимах привода, включая глубокую 2-ю и 3-ю зоны регулирования скорости.
Библиографический список
1.Seung-Gi Jeong and Min-Ho Park. The analysis and compensation of dead-time effects in PWM inverters // IEEE Transactions on Industrial Electronics. Apr 1991. Vol. 38. No. 2. P. 108–114. URL: http: //ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber= 88903&isnumber = 2898.
2.Implementation of fast and accurate modeling method of electric drives / A. Anuchin, F. Briz, L. Rassudov, I. Gulyaev // Power and Electrical Engineering of Riga Technical University (RTUCON), 2015 56th International Scientific Conference on, Riga. 2015. P. 1–5. URL: http: //ieeexplore.ieee.org/stamp/stamp.jsp? tp = &arnumber = 7343158&isnumber = 7343109.
3.Gang Zheng, Shengjie Guo, Shibin Cai, Shicai Fan and Yahui Ren, Efficiency analysis of two dead-time compensation methods for SVPWM in motor drive system of the electric vehicle // Power Electronics and Motion Control Conference (IPEMC), 2012 7th International, Harbin, China, 2012. P. 2489–2493. URL: http: //ieeexplore.ieee.org/stamp/stamp.jsp? tp = &arnumber = 6259248&- isnumber = 6259211.
4.Оптимизация КПД системы векторного управления асинхронным тяговым электроприводом с идентификатором параметров / А.Б. Виноградов, Д.Б. Изосимов, С.Н. Флоренцев, Н.А. Глебов // Электротехника. 2010. № 12.
5.Alex Tessarolo. F2810, F2811, and F2812 ADC Calibration. Application Report. Texas Instruments, November 2004. URL: ti.com›lit/an/spra989a/spra989a.pdf
6.Matthew Pate. TMS320280x and TMS3202801x ADC Calibration. Application Report. Texas Instruments, March 2007. URL: ti.com›lit/ an/spraad8a/spraad8a.pdf
7.Результаты разработки и испытаний комплекта тягового электрооборудования карьерного самосвала грузоподъемностью 240 тонн / А.Б. Виноградов, Н.Е. Гнездов, С.В. Журавлев, А.Н. Сибирцев // Электротехника. 2015. № 3. С. 39–45.
8.Тяговый электропривод гусеничного промышленного трактора БЕЛАРУС 1502Э / А.Б. Виноградов, Н.Е. Гнездов, Н.А. Глебов, В.Л. Чистосердов, С.В. Журавлев // Тр. 7-й Междунар. конф. по автоматизированному электроприводу АЭП-2012. Иваново, 2–4 октября 2012. С. 445–448.
9.Compensating the dead time of voltage inverters with the ADMC331. Analog Devices Inc., August 2000. URL: ftp: //ftp.analog.com/pub/ www/marketSolutions/motorControl/applicationCode/admc331/pdf/d ead_time331.pdf
10.Riccardo Di Gabriele, Roberto Petrella, Marco Tursini. Compensation of voltage source inverter non-linearity by using TMS320F24x DSP. URL: http: //focus.ti.com/pdfs/univ/03-ControlFilterDesignEstima- tion.pdf.
11.Lewicki A. Dead-Time Effect Compensation Based on Additional Phase Current Measurements // IEEE Transactions on Industrial Electronics. July 2015. Vol. 62. No. 7. P. 4078–4085. URL: http: //ieeexplore.ieee.org/stamp/stamp.jsp? tp = &arnumber = 7005536& isnumber = 7109198.
12.Виноградов А.Б. Векторное управление электроприводами переменного тока // Иван. гос. энерг. ун-т им. В.И. Ленина. Иваново, 2008. 320 с. URL: http: //vectorgroup.ru/articles/book1.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 127 -
УДК 621.313: 62-83
Реализация системы управления синхронным электродвигателем с постоянными магнитами с замкнутым контуром скорости в режиме холостого хода в среде MexBIOS
И.В. Гуляев, Г.М. Тутаев, А.А. Попов, А.В. Волков
Мордовский государственный университет им. Н.П. Огарева, Саранск, Россия
The implementation of synchronous motor control system of permanent magnet closed loop speed idling in MexBIOS environment
I.V. Gulyaev, G.M. Tutaev, A.A. Popov, A.V. Volkov
National Research Mordovia State University,
Saransk, Russian Federation
Реализована векторная система управления синхронным электродвигателем с постоянными магнитами (СДПМ)
сзамкнутым контуром скорости в режиме холостого хода
сиспользованием среды графического программирования
MexBIOS Development Studio. В результате проведенных исследований реализована структура векторного управления в среде графического программирования и рассмотрена реализация регуляторов скорости и тока. Рассмотренная реализация системы векторного управления может быть вдальнейшем использована при создании программной части испытательной установки для синхронного двигателя с постоянными магнитами (СДПМ) с возможностью расширенияфункционалаидобавлениядругихсистемуправления.
Implemented synchronous motor vector control system with permanent magnets (PMSM) with closed-loop speed idling, using a visual programming environment MexBIOS Development Studio. The studies implemented vector control structure in the environment of visual programming and reviewed the implementation of the speed and current regulators. Considered in the implementation of vector control system can then be used to create the software part of the test set for a synchronous motor with permanent magnets (PMSM) with the ability to increase functionality and add other control systems.
Ключевые слова: векторное управление, синхронный двигатель с постоянными магнитами, структура системы управления, регулятор скорости, регулятор тока, среда визуального программирования, имитационное моделирование.
Keywords: vector control, synchronous motor with permanent magnets, the structure of the control system, speed controller, current controller, a visual programming environment simulation.
ВВЕДЕНИЕ
Синхронные двигатели с постоянными магнитами (СДПМ) вызывают повышенный интерес в связи с их масштабным использованием в промышленных электроприводах. Повышенная эффективность, большие значения крутящего момента при малых массогабаритных показателях в сравнении с асинхронными двигателями делают такие привода хорошей альтернативой. Наиболее подходящие для таких приводов системы управления – это векторное управление и прямое управление моментом.
Широкое применение в построении подобных систем управления получили системы на базе цифровых сигнальных процессоров (Digital signal processor, DSP).
Разработка подобных систем занимает длительный период времени и требует как знаний в области программирования, так и знания аппаратной части. Для упрощения подобных инженерных задач в короткие сроки в компании «НПФ Мехатроника-Про», которая специализируется на разработке программного обеспечения для систем управления электродвигателями
ипреобразователями частоты под управлением DSP, была разработана визуальная среда программирования
имоделирования встроенного программного обеспечения систем управления электродвигателями, технологическими комплексами, программируемыми логи-
ческими контроллерами – MexBIOS Development Studio. MexBIOS Development Studio предоставляет пользова-
телю возможность [3]:
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 128 -
1) создавать собственные программы управления электродвигателями, технологическимикомплексами, ПЛК;
2) выполнять моделирование работы программы и электромеханических объектов и систем;
3) производить отладку программы, загруженной
вмикроконтроллер;
4)устанавливать библиотеки компонентов для новых микроконтроллеров.
«НПФ Мехатроника-Про» выпускает серию преобразователей частоты MBS-FC01.xx.xxx, которая пред-
ставляет собой преобразователь частоты с открытой программной платформой на базе DSP TMS320F28335 производства Texas Instruments и силового интеллектуального модуля [5].
Программное обеспечение преобразователя частоты построено на базе предустановленной во Flash-памяти процессора операционной среды реального времени MexBIOS и графической среды программирования
MexBIOS Development Studio. Такая особенность пре-
доставляет пользователям преобразователя возможность разрабатывать, дорабатывать программное обеспечение и оптимизировать его под собственные задачи, в том числе разрабатывать и добавлять собственные программные модули как уровня управления силовым инвертором, так и уровня программно-логического контроллера для решения задач локальной автоматизации. Причем для этого могут использоваться языки как текстового, так и графического программирования, что делает процесс доступным не только для профессиональных программистов, но и для инженеров, не имеющих опыта в текстовом программировании.
I. МОДЕЛЬ СДПМ
Рассмотрим уравнения синхронной машины с постоянными магнитами в ортогональной синхронной системе координат (d, q), ось d которой ориентирована по магнитной оси ротора. В этом случае они принимают следующий вид [4]:
Ud |
= |
dΨd |
− Ψq ω+ Rs Id ; |
(1) |
||||
|
dt |
|||||||
|
|
|
|
|
|
|||
Uq |
= |
dΨq |
|
− Ψd ω+ Rs Id ; |
(2) |
|||
dt |
||||||||
|
|
|
|
|
|
|||
|
Ψd = Ld Id |
+ Ψ f ; |
(3) |
|||||
|
|
|
Ψq |
= Lq |
Iq ; |
(4) |
||
ты; ω – электрическая частота вращения ротора; J – момент инерции ротора; β – коэффициент вязкого трения (коэффициент демпфирования); Ψd, Ψq, Ψf – потокосцепления статора по осям d, q и создаваемое постоянным магнитом; Ld, Lq – индуктивности обмотки статора по продольной и поперечной осям ротора.
Записывая (1)–(6) относительно Id, Iq, получим:
|
|
dId |
|
|
= |
1 |
(Ud |
− Rs Id + ω Lq Iq ); |
(7) |
|||||||
|
|
dt |
|
|
L |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
dIq |
= |
1 |
|
(Uq |
− Rs Iq |
− ω Ld Id |
− ω Ψ f ); |
(8) |
||||||||
|
|
|
||||||||||||||
dt L |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
dΩ |
= |
1 |
(M − MC − β Ω); |
(9) |
||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
dt |
|
|
J |
|
|
|
|
||
M = |
3 |
Z p |
|
Ψ f |
Iq |
+ (Ld − Lq ) |
|
(10) |
||||||||
|
|
|
||||||||||||||
2 |
|
Id Iq . |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для частного случая неявнополюсной конструкции ротора двигателя
Ld = Lq = Ls . |
(11) |
II. ПОСТРОЕНИЕ СИСТЕМЫ ВЕКТОРНОГО УПРАВЛЕНИЯ В СРЕДЕ MEXBIOS
Исходя из синтеза системы управление на основе динамической модели СДПМ в системе координат (d, q), ориентированной по магнитной оси ротора, из (1)–(6), построим функциональную схему системы векторного управления СДПМ (рис. 1), где θ – угловое положение ротора(электрическое), полученноесдатчикаположения.
Задание тока по оси d позволяет минимизировать ток статора при заданной величине момента нагрузки. В таком случае ток статора во всех режимах работы привода направлен перпендикулярно магнитной оси ротора (по оси q). Преобразователь координат αβ → dq выполняет преобразование токов из двухфазной неподвижной системы координат (α, β) в двухфазную вращающуюся систему координат (d, q).
Коротко рассмотрим процедуру синтеза регулятора скорости. Для этого запишем основное уравнение динамики движения электропривода в виде [1]
dωψ |
= |
C |
ω |
ψ |
+ |
Te − TL |
= L |
, |
(12) |
|
dt |
J |
|
J |
|||||||
|
|
|
|
s |
|
|
||||
M = |
3 Z p (Ψd Iq − Ψq Id ); |
(5) |
где С – коэффициент трения; Te – электродинамический |
|||
|
|
2 |
|
|
|
момент; TL – момент сопротивления; ωψ – электрическая |
|
dΩ |
1 |
|
|
скорость вращения ротора; J – момент инерции. |
|
|
(M − MC − β Ω); |
|
Электрическая скорость вращения ωψ определяется |
|||
|
|
= |
|
(6) |
согласно выражению ωψ = p·ωr, где ωr – скорость вра- |
|
|
dt |
J |
||||
|
|
|
|
|
|
щения ротора; p – число пар полюсов двигателя. |
где Id, Iq, Ud, Uq – |
токи и напряжения статора по осям |
При настройке регулятора скорости принимаем в ка- |
||||
d и q; M, MС – электромагнитный и нагрузочный момен- |
честве желаемой передаточной функции апериодическое |
|||||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 129 -

Рис. 1. Функциональная схема системы векторного управления СДПМ
Рис. 2. Cхема схема регулятора скорости в среде MexBIOS
звено [1]. В результате синтеза получаем ПИ-регулятор скорости с передаточной функцией:
W |
( p) = K |
pω |
+ |
Kiω |
. |
(13) |
|
||||||
ω |
|
|
p |
|
||
|
|
|
|
|
||
Параметры регулятора определяем согласно выражениям
K pω |
= aω |
J; |
(14) |
|
Kiω = aω (C + Ca ), |
||||
|
||||
где Ca = aω J − C.
Коэффициент αω принимается равным 1/50 от постоянной времени ПИ-регулятора тока. Реализация регулятора скорости в среде Mex BIOS Development Studio приведена на рис. 2.
Для настройки интегрального и пропорционального коэффициентов регулятора тока используем параметры двигателя:
K pc |
= a LSd |
; |
(15) |
|
Kic = ac (Rs + Ra ), |
||||
|
||||
где Ra = ac·Lsd – добавочное сопротивление, которое вводится в уравнение равновесия статора для приведения передаточной функции замкнутой системы к виду апериодического звена Реализация регулятора тока в среде
MexBIOS Development Studio приведена на рис. 3.
Создание проекта для микропроцессорного модуля (DSP) осуществляется после этапа моделирования и отладки алгоритмов управления в режиме моделирования и последующей загрузки управляющей программы в ОЗУ микропроцессора. Запуск проекта векторного управления был осуществлен на базе преобразователей частоты серии MBS-FC01.xx.xxx с микропроцессором TMS320F28335 [7]. Данный преобразователь частоты предназначен для управления промышленными трехфазными асинхронными электродвигателями основного типа, синхронными электродвигателями, электродвигателями постоянного тока.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 130 -