

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfрадиальной силы, можно получить выражения продольной и поперечной составляющих второй и четвертой гармоник радиальной силы – основных источников шума [2]. При этом квадрат действующего значения тока статора
|
1 |
ν <m |
(Isq2 |
|
(ν ) ), |
|
Is2 = |
|
(ν ) + Isd2 |
(2) |
|||
|
2 |
ν =1,3 |
|
|
|
|
и электромагнитный момент
|
m |
ν <m |
|
|
M = |
p ν i'f Lm (ν ) Isq(ν ) . |
(3) |
||
|
||||
2 |
ν =1,3 |
|
||
Далее ставится задача компромиссной минимизации действующего значения тока статора при сохранении требуемого значения момента, и, учитывая специфику многофазного СД как объекта управления, полученные соотношения вводятся в многоканальную САУ, обеспечивая снижение радиальной силы при сохранении высоких энергетических показателей системы. Такой подход позволил добиться двукратного снижения величины радиальной силы 9-фазного СД при сохранении основных эксплуатационных характеристик [3].
II. ИСПОЛЬЗОВАНИЕ ELCUT
Наиболее точное определение величин Bs и Br для анализа распределения магнитной индукции вдоль расточки магнитопровода любой конфигурации можно получить, используя современные программные комплексы, базирующиеся на методе конечных элементов. Одной из таких программ является отечественная ElCut, позволяющая достаточно удобно на основе встроенных инструментов рассчитывать реальную конфигурацию электромагнитного поля в активных частях машины.
Оценка величины радиальной силы при использовании ElCut осуществлялась по следующему алгоритму:
1)Построение реальной геометрии машины в виде сечения с указанием отдельных конструктивных частей
иих свойств (магнитные свойства материалов, источники полей). Учет активной длины машины осуществляется заданием соответствующего параметра в свойствах задачи.
2)Выделение зубцов статора в виде отдельных блоков и создание скрипта перерасчета пондемоторной силы в радиальную отдельного зубца.
3)Построение кривой зависимости полученной радиальной силы от условного номера зубца.
Таким образом, для текущего квазистационарного состояния машины может быть получена картина распределения радиальных сил по зубцам статора. Оптимизация этого распределения осуществляется как за счет изменения геометрии машины, так и путем изменения токов в обмотках статора. Лучшего результата удалось добиться комбинацией указанных подходов.
Численные эксперименты показывают, что основной вклад в формирование поля зазора и, следовательно, величины радиальной силы вносят постоянные магниты
ротора (рис. 1). При этом меньший уровень радиальной силы соответствует криволинейной форме ротора, обеспечивающей неравномерный воздушный зазор вдоль полюса магнита. Наилучший результат соответствует форме ротора, при которой радиус кривизны полюсов увеличен на 30 %, что для гладкого исполнения статора обеспечивает трапецеидальное распределение индукции. Форма такого ротора и реальная картина индукции в зазоре машины приведены на рис. 2.
Еще большее снижение величины радиальных сил может быть достигнуто за счет синтеза фазного тока статора оптимального гармонического состава. Для этого задача с новой геометрией ротора и синусоидальным распределением токов подвергается итерационным перерасчетам, основанным на последовательном изменении величины тока каждой фазы. Критерием перехода к следующей фазе является невозможность дальнейшего уменьшения площади под заданной в пределах периода кривой распределения радиальных сил при фиксированном пороговом значении электромагнитного момента. После пересчета тока последней (для 9-фазного исполнения двигателя – 9-й) обмотки, из полученных значений формируется дискретное представление фазного тока с шагом в (360°/(2m)) = 20°. Сформированный массив подвергается дискретному преобразованию Фурье, в результате которого выделяются токовые гармоники с порядковым номером, меньшим числа фаз. По найденным значениям составляющих рассчитывается искомая кривая изменения фазного тока статора, определяющая наименьшее значение радиальных сил.
Рис. 1. Распределение радиальных сил по зубцам статора: 1 – магниты ротора – единственный источник поля; 2 – дополнительно задействована статорная обмотка
а |
б |
Рис. 2. Форма ротора, обеспечивающая снижение величины радиальных сил (а) и распределение индукции на один полюс магнита (б) (пунктирные линии относятся к круглому исполнению ротора)
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 21 -

Рис. 3. Кривая оптимизированного фазного тока
В качестве иллюстрации результатов предложенной оптимизации на рис. 3 показана расчетная кривая фазного тока i (ωt). На рис. 4 приведено сравнение картины распределения механических напряжений вдоль внешней поверхности статорного кольца для 9-фазного СД с постоянными магнитами (Pн = 2,5 кВт, ωн = 157 рад/с): 1 – с питанием токами синусоидальной формы и круглым ротором; 2 – с питанием токами оптимизированной формы и ротором, изображенным на рис. 2.
Следует отметить, что само по себе увеличение числа фаз практически не влияет на уровень радиальных сил, оно лишь открывает возможность более глубокого и качественного воздействия на конфигурацию поля маши ны, определяющуюэтисилы. Поэтому улучшение
Рис. 4. Сравнительные характеристики распределения механических напряжений: 1 – до оптимизации;
2 – после комплексной оптимизации
виброшумовых характеристик многофазного ЭП базируется на формировании питающих воздействий специальной, отличающейся от синусоидальной, формы.
Библиографический список
1.Голубев А.Н., Лапин А.А. Многофазный синхронный регулируемый электропривод / Иван. гос. энерг. ун-т им. В.И. Ленина.
Иваново, 2008. 156 с.
2.Геллер Б., Гамата В. Высшие гармоники в асинхронных маши-
нах. М.: Энергия, 1981. 352 с.
3.Синхронный электропривод с улучшенными виброшумовыми характеристиками и его моделирование / А.Н. Голубев, С.С. Анань-
ев [и др.] // Вестник ИГЭУ. 2013. № 2. С. 33–39.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 22 -

УДК 621.313-57
Условия устойчивой синхронизации трех и более двигателей, закрепленных на общем основании
Б.А. Гордеев, С.Н. Охулков, А.В. Леонтьева |
Д.Ю. Титов |
Институт проблем машиностроения РАН, |
Нижегородский государственный технический университет |
Нижний Новгород, Россия |
им. Р.Е. Алексеева, Нижний Новгород, Россия |
Conditions for stable synchronization of three and more motors mounted on one foundation
B.A. Gordeev, S.N. Okhulkov, A.V. Leontyeva
Institute of Machine Building of Russian Academy of Sciences,
Nizhny Novgorod, Russian Federation
Изучаются вопросы устойчивости режимов синхронизации нелинейных систем, которые возникают самопроизвольно при работе на общем основании трех и более электродвигателей, с неуравновешенными роторами, а также режимов, исключающих синхронизацию. В работе рассматриваются системы трех двигателей, выявлены необходимые и достаточные условия синхронизации.
The paper studies problems of stability of synchronization conditions for nonlinear systems, which occur spontaneously during operation of three and more electric motors fixed on one foundation, where their rotors are unbalanced, and conditions excluding synchronization. The paper considers systems of three motors. Necessary and sufficient conditions for synchronization are revealed. Problem of stable synchronization occurs in rail transport, where several motors work simultaneously in different modes.
Ключевые слова: двигатель, неуравновешенные роторы, резонанс, устойчивая синхронизация.
Keywords: engine, unbalanced rotors, resonance, stable synchronization.
ВВЕДЕНИЕ
Одна из причин многих аварий в энергоемком оборудовании в стационарных системах и на транспорте является синхронизация частот вращения роторов двигателей, по причине вибрации их общего основания. Режимы синхронизации возникают произвольно при подходящих параметрах конструкции, такие режимы устойчивы, и разрушить их очень сложно.
Так, возникающая на транспортных средствах, в частности электровозах, синхронизация вращения роторов часто приводит к дополнительному потреблению энергии ивозрастаниювременипереходныхпроцессов[1, 2].
D.Yu. Titov
Nizhny Novgorod State Technical University n.a. R.E. Alexeev, Nizhny Novgorod, Russian Federation
Поэтому задача о выявлении стационарных режимов синхронизации, их устойчивости и своевременное предотвращение отрицательного эффекта синхронизации в конструкциях со многими источниками вибрации, является одной из важных задач механики и тех-
ники [6, 7].
Известно, что два или более кинематически и электрически не связанных между собой ротора, установленные на общем основании и приводимые в движение независимыми двигателями, вращаются синхронно – с одинаковыми или кратными средними угловыми скоростями и с определенными взаимными фазами (рис. 1).
При этом согласованность вращения роторов возникает, несмотря на различие между их угловыми скоростями, т.е. теми скоростями, с которыми они вращаются, будучи установленными на общем основании [1, 4].
Разрушить устойчивую самопроизвольную синхронизацию роторов двигателей, установленных на общем основании необходимо в тех случаях, когда более энергоемкий источник влияет на работу многих менее энергоемких 0.
Рис. 1. Физическая модель задачи о синхронизации роторов трех двигателей, вращающихся в одном направлении
Физическая модель задачи (см. рис. 1) представляет собой систему трех двигателей, закрепленных на упругой платформе с одной степенью свободы. Источники
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 23 -

энергии вибрации – электродвигатели с неуравновешенными роторами, обладающими моментами инерции Ii.
Неуравновешенные массы роторов расположены на расстоянии ri от оси их вращения.
I. УСТОЙЧИВОСТЬ СТАЦИОНАРНОГО РЕЖИМА ДЛЯ СИСТЕМЫ ДВУХ ДВИГАТЕЛЕЙ
Критерий Рауса–Гурвица позволяет исследовать устойчивость линейных систем в точке с наименьшим потреблением энергии. Так как по условию задачи источников вибрации (двигателей) может быть более трех, то в этом случае для решения системы дифференциальных уравнений, описывающих процессы синхронии, характеристическое уравнение имеет порядок более трех. Его решение может быть найдено численными методами.
Для исследования устойчивости системы двух двигателей найденного стационарного решения целесообразно использовать критерий Рауса–Гурвица, из которого находим необходимые и достаточные условия асимптотической устойчивости
q cos θ0 < 0, pk cos θ0 + m( + q sin θ0) < 0, |
(1) |
где θ0 = α1 – α2 – медленная фаза, на которой наблюдается синхронизация, α1, α2 – быстро вращающиеся фазы для первого и второго двигателей соответственно, – значения расстройки.
|
|
k = 1 |
μ2 |
k1k2Ω12Ω22 (1+ Ω1Ω2 ) |
, m = |
1 μ2 d 2 |
, |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
4 Ω2 |
|
|
|
|||||||||||||||||
|
|
|
4 |
|
|
(Ω12 −1)(Ω22 −1) |
|
|
|
|
|
|
|
|
|
|||||||||||
|
1 |
2 |
2 |
|
ci Ωi2 |
|
|
|
πd |
2 |
|
|
|
1 |
|
2 |
|
2 |
(−1)i ci2Ωi2 |
|
||||||
n = |
|
μ |
( |
|
|
|
|
+ |
|
|
|
) , p = − |
|
μ |
|
|
|
|
|
|
, |
|||||
4 |
|
2 |
−1) |
|
|
|
4 |
|
2 2 |
2 |
− |
1) |
||||||||||||||
|
|
i=1 ai (Ωi |
|
|
Ω2 |
|
|
|
|
|
i=1 |
ki ai |
(Ωi |
|
||||||||||||
|
|
|
|
|
|
|
1 |
2 c1 |
|
|
c2 |
2 |
ai ki2Ωi4 |
|
|
|
|
|
||||||||
|
|
|
|
|
q = − |
2 μ |
|
|
|
|
|
i=1 |
|
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
a1k1 a2 k2 |
ci (Ωi2 −1) |
|
|
|
|
||||||||||||||
Рис. 2. Вид поверхности левой части второго неравенства
В сечениях поверхности при различных значениях расстройки имеем следующие графики (рис. 3), из которых видно, что при увеличении расстройки область устойчивости сужается, но тем не менее устойчивое стационарное решение существует: θ0 = π.
где Ω1, Ω2 – круговые частоты вращения двигателей; ai, ci, ki – постоянные параметры, характеризующие качественные характеристики двигателя, μ = mi / m << 1 – малый параметр системы.
Так как q > 0 при любых параметрах системы, то из первого неравенства получаем значения фазы π/ 2 < < θ0 < 3π/ 2. По условию задачи роторы двигателей вращаются в одном направлении, значит, единственно возможным значением разности фаз при возникновении устойчивого режима синхронизации является θ0 = π. Частично данныевыводыподтвержденыэкспериментом.
В результате эксперимента было выявлено, что время до полного останова каждого из роторов двигателей с одинаковыми статическими и частотными характеристиками и с одинаковым направлением вращения ротора из режима синхронизации заметно сокращается в сравнении со временем до полного останова каждого из двигателей, работающих по отдельности, т.е. независимо друг от друга 0.
Левая часть второго неравенства (1) имеет вид поверхности (рис. 2).
Рис. 3. Вид сечений поверхности медленных фаз при фиксированных значениях расстроек = 0, = 5, = 10
Таким образом, противофазное вращение однонаправленных роторов двигателей является устойчивым стационарным режимом работы двигателей, установленных на общем основании.
II. УСТОЙЧИВОСТЬ СТАЦИОНАРНОГО РЕЖИМА ДЛЯ СИСТЕМЫ ТРЕХ ДВИГАТЕЛЕЙ
В работе 0 рассматривается явление синхронизации роторов трех асинхронных двигателей, установленных на упругом основании. Физическая и математическая постановки задачи формулируется аналогично случаю с двумя двигателями. После введения безразмерной координаты, безразмерного времени и малого параметра, в качестве которого берем отношение неуравновешенной массы ротора к массе основания, приводим систему к стандартной форме и вводим быстро вращающиеся фазы. Затем проводим исследование полученной системы методом осреднения.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 24 -
Вычисление временного среднего для системы первого приближения и определение точек разрыва вычисленных функций позволяет найти следующие резонанс-
ные прямые: 1 – Ω1 = 0; 1 – Ω2 = 0; 1 – Ω3 = 0, где Ω1, Ω2,
Ω3 – круговые частоты вращения двигателей.
Резонанс между двигателями не обнаружен. Первое приближение не позволяет выявить эффект синхронизации.
Второе приближение позволяет обнаружить эффект синхронизации. Резонансные соотношения, которые характеризуют эффект синхронизации роторов трех двигателей в механической системе,
Ω1 – Ω2 = 0, Ω2 – Ω3 = 0,
частоты вращения двигателей близки между собой, но далеки от частоты колебаний платформы.
Осредненные по быстрым переменным уравнения для амплитуды колебаний основания и медленных фаз
|
1 = α1 |
> 0, |
|
= α1α2 − α0α3 > 0, |
|
2 |
||
|
3 = α3 |
2 > 0, |
которые эквивалентны следующей системе неравенств:
a0 > 0, a1 > 0, a2 > 0, a3 > 0, a1a2 – a0a3>0.
Для характеристического уравнения условия устойчивости выглядят следующим образом:
q11 cos(θ10 ) + q21 cos(θ20 ) + (q22 + q12 )cos(θ10 + θ20 ) < 0 ,
(q21q11 − q13q23 )cos(θ10 ) cos(θ20 ) + (q22 q11 + q12 q23 ) cos(θ10 )× × cos(θ20 + θ10 ) + (q21q12 + q13q22 ) cos(θ10 + θ20 ) cos(θ20 ) − −2k1 ( p2 + p1 )( 1 + 2 )cos(θ10 + θ20 ) − 2 p2 k3 2 cos(θ20 ) −
−2 p1k2 |
1 cos(θ10 ) > 0, |
(k2 1 ( p1q22 − p2q12 ) + k1 ( |
1 + 2 )( p1q23 + p2q11 ))cos(θ10 )× |
×cos(θ10 + θ20 ) + (k3 2 ( p2q12 − p1q22 ) + k1 ( 1 + 2 )×
|
|
B = −k1 |
( 1 + 2 ) |
sin(θ1 + θ2 ) − k2 |
1 |
sin(θ1 ) − |
||
|
|
B |
|
|||||
|
|
|
|
|
B |
|||
|
|
|
−k3 |
|
2 |
sin(θ2 ) + nB, |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
B |
|
|
|
θ1 |
= |
1 + q11 sin(θ1 ) − p1B2 + q12 sin(θ1 + θ2 ) − q13 sin(θ2 ), |
||||||
θ2 |
= |
2 + q21 sin(θ2 ) − p2 B2 + q22 sin(θ1 + θ2 ) − q23 sin(θ1 ). |
||||||
Для исследования задачи устойчивости стационарных решений составляются уравнения в вариациях, и формулируется проблема собственных значений, приводящая кхарактеристическомууравнениютретьейстепени
a0λ3 + a1λ2 + a2λ + a3 = 0 |
(2) |
с коэффициентами |
|
a1 = –(q11cosθ10 + q21cosθ20 + (q22 + q12) cos(θ10 + θ20)),
a2 = (q21q11 – q13q23) cos(θ10) cos(θ20) + (q22q11 + q12q23) ×
× cos(θ10) cos(θ10 + θ20) + (q21q12 + q13q22) ×
× cos(θ10 + θ20) cos(θ20) – 2k1(p1 + p2) ( |
1 + 2) × |
× cos(θ10 + θ20) – 2p2k3 2cos(θ20) – 2p1k2 |
1cos(θ10) |
a3 = 2(k2 1(p1q22 – p2q12) + k1( 1 + 2) (p1q23 + p2q11)) ×
× cos(θ10) cos (θ10 + θ20) + 2(k3 2(p2q12 – p1q22) + + k1( 1 + 2) (p2q13 + p1q21)) cos(θ20) cos(θ10 + θ20) +
+ 2(k2 1(p2q13 + p1q21) + k3 2(p1q23 + p2q11)) ×
×cos(θ10) cos(θ20).
Теперь для исследования устойчивости и отыскания областей параметров устойчивости используется критерий Рауса–Гурвица, который гласит, что для устойчивости движения необходимо и достаточно выполнение условий при a0 > 0:
×( p2q13 + p1q21 ))cos(θ20 )cos(θ10 + θ20 ) + (k2 1 ( p2q13 + p1q21 ) +
+k3 2 ( p1q23 + p2q11 ))cos(θ20 )cos(θ10 ) > 0,
q11(q21q11 – q13q23) cos2(θ10) cos(θ20) +q21(q21q11 – q13q23) ×
×cos(θ10) cos2(θ20) + q11(q22q11+ q12q23) cos2(θ10) ×
×cos(θ10 + θ20) + q21(q21q12 + q13q22) cos(θ10 + θ20) ×
×cos2(θ20) + (2q21q11(q22 + q12) + q12q23(q21 – q13) +
+q13q22(q11 – q23)) cos(θ10) cos(θ20) cos(θ10 + θ20) +
+(q22 + q12) (q22q11 + q12q23) cos(θ10) cos2(θ10 + θ20) +
+(q22 + q12) (q21q12 + q13q22) cos(θ20) cos2(θ10 + θ20) +
+ 2(k1p1( 1 + |
2) (q23 – q11) – k2 |
1q12(p1 + p2)) cos(θ10) × |
× cos(θ10 + θ20) + 2(k1p2( |
1 + 2) (q13 – q21) – |
|
– k3 2q22(p1 + p2)) cos(θ20) cos(θ10 + θ20) + |
||
+ 2(k2 |
1p2q13 + k3 2p1q23) cos(θ10) cos(θ20) – |
|
– 2p1k2 1q11cos2(θ10) – 2p2k3 2q21cos2(θ20) – 2k1(p1+p2) ×
× ( |
1 + |
|
2) (q22 + q12) × cos2(θ10 + θ20) < 0. |
|||||||||||||||||||||||||
Для упрощения записи вводим обозначения |
|
|||||||||||||||||||||||||||
|
|
k1 = |
1 |
|
2 |
κ1κ3Ω12Ω32 (1+ Ω1Ω3 ) |
|
, |
|
|
|
|
||||||||||||||||
|
|
|
|
|
μ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
4 |
|
|
|
|
|
|
(Ω12 −1)(Ω32 −1) |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
1 |
|
2 |
|
κ1κ2Ω12Ω22 (1+ Ω1Ω2 ) |
|
|
|
|
|
|
|||||||||||||
|
|
k2 = 4 |
μ |
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
||||||||
|
|
|
|
|
|
(Ω12 −1)(Ω22 −1) |
|
|
|
|
|
|
||||||||||||||||
|
|
k3 = |
1 |
μ |
2 |
κ2κ3Ω22Ω32 (1+ Ω2Ω3 ) |
, |
|
|
|
|
|||||||||||||||||
|
|
4 |
|
|
|
|
|
(Ω22 −1)(Ω32 −1) |
|
|
|
|
|
|||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
p1 |
= |
μ2 |
|
|
|
|
|
|
|
Ω1c1 |
|
− |
|
|
Ω2c2 |
|
|
|
|
|
, |
|||||||
4 |
|
|
|
|
|
|
|
(Ω1 −1) |
κ2 a2 |
(Ω2 |
|
− |
|
|||||||||||||||
|
|
|
|
κ1 a1 |
|
|
1) |
|
||||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
2 |
2 |
|
|
2 |
2 |
2 |
|
|
|
|
|
|
|
||||||
|
|
1 |
|
2 |
|
|
c2 |
|
|
|
κ1Ω14 |
|
|
c1 |
|
|
κ2 |
Ω24 |
|
|||||||||
q11 |
= |
|
μ |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
(Ω1 −1) |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
|
|
|
κ2 a2 |
|
|
|
κ1a1 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
(Ω2 −1) |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 25 -
|
|
|
|
q12 = |
1 |
μ |
2 |
|
c1 |
|
|
|
|
κ3Ω34 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
||||||||||
|
|
|
|
2 |
|
|
κ1a1 |
(Ω32 −1) |
|
|
|
|
|||||||||||||||||
|
|
|
|
q13 = |
1 |
|
|
2 |
|
c2 |
|
|
|
|
κ3Ω34 |
|
|
|
|
|
|||||||||
|
|
|
|
2 μ |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
κ2 a2 |
|
|
(Ω32 −1) |
|
|
|
|
|
|||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
p2 |
= |
μ2 |
|
Ω2c2 |
|
|
|
|
− |
Ω3c3 |
|
|
, |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
4 |
|
|
κ22 a22 (Ω22 −1) |
|
|
κ32a32 (Ω32 −1) |
|
||||||||||||||||||||
|
|
1 |
|
2 |
|
c3 |
|
|
|
κ2Ω24 |
|
|
|
|
|
c2 |
κ3Ω34 |
|
|
|
|||||||||
q21 |
= |
|
μ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
(Ω2 −1) |
|
κ2a2 ( |
|
|
|
|||||||||||||||||||
|
|
2 |
|
|
|
κ3a3 |
|
|
|
Ω3 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
−1) |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
|
|
|
|
q22 = |
1 |
μ |
2 |
|
c3 |
|
|
|
|
κ1Ω14 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
κ3a3 |
|
|
|
(Ω12 −1) |
|
|
|
|
||||||||||||||
|
|
|
|
q23 = |
1 |
μ |
2 |
|
c2 |
|
|
|
|
κ1Ω14 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
κ2a2 |
|
|
|
(Ω12 −1) |
|
|
|
|
||||||||||||||
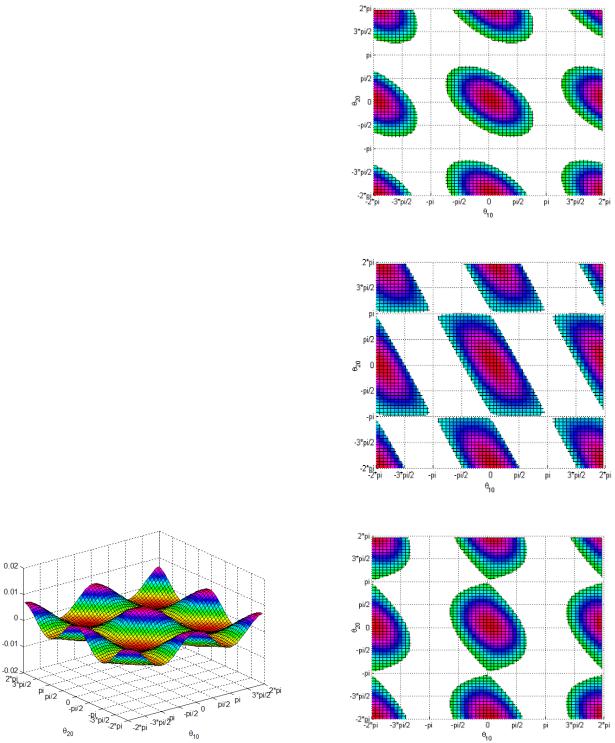
Левая часть первого неравенства имеет вид следующей поверхности (рис. 4). При построении поверхности считалось, что расстройки по частоте между всеми тремя двигателями равны нулю ( 1 = 2 = 0).
Вид поверхности в плоскости медленных фаз представлен на рис. 5, области устойчивости отмечены белым цветом.
При увеличении одной из расстроек области устойчивости приобретают вид, представленный на рис. 6, 7.
При одновременном изменении расстроек область устойчивости изображена на рис. 8.
В сечениях θ20 = 0, θ20 = π поверхности при фиксированном значении расстройки 2 = 0 и изменении расстройки 1 имеем графики (рис. 9, 10), из которых видно, что при увеличении 1 область устойчивости расширяется вдоль оси θ10.
При задании 2 = 10 поверхность в сечении θ20 = 0 ведет себя аналогично изображенному на рис. 9; амплитуда кривой падает, область устойчивости увеличивается вдоль θ10.
При рассмотрении поверхности в сечениях θ10 = 0, θ20 = π получаем графики (рис. 11, 12), из которых видно, что при фиксированном значении 2 = 0 и увеличении 1 область устойчивости сужается вдоль оси θ20, превращаясь в точку.
При фиксированном значении 2 = 10 и изменении 1 областьустойчивостиимеетвидвсеченииθ10 = 0 (рис. 13).
Рис. 5. Вид поверхности в плоскости медленных фаз при 1 = 2 = 0
Рис. 6. Вид поверхности в плоскости медленных фаз при увеличении одной из расстроек 1 = 20, 2 = 0
Рис. 4. Вид поверхности левой части первого |
Рис. 7. Вид поверхности в плоскости медленных фаз |
неравенства при 1 = 2 = 0 |
при увеличении одной из расстроек 1 = 0, 2 = 20 |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 26 -

Рис. 8. Вид поверхности в плоскости медленных фаз |
|
|
при увеличении одной из расстроек 1 = 20, 2 = 20 |
Рис. 11. Вид сечения θ10 = 0 поверхности |
2 = 0 медленных фаз |
|
при фиксированных значениях расстроек |
1 = 0, 1 = 10, 1 = 20 |
Рис. 9. Вид сечения θ20 = 0 поверхности |
2 |
= 0 медленных фаз |
Рис. 12. Вид сечения θ10 = π поверхности |
2 = 0 медленных фаз |
||
при фиксированных значениях расстроек |
1 = 0, 1 = 10, 1 = 20 |
|||||
при фиксированных значениях расстроек |
|
1 = 0, 1 = 10, |
1 = 20 |
|||
|
|
|
||||
Рис. 10. Вид сечения θ20 = π поверхности |
2 = 0 медленных фаз |
Рис. 13. Вид сечения θ10 = 0 поверхности |
2 = 10 медленных фаз |
при фиксированных значениях расстроек |
1 = 0, 1 = 10, 1 = 20 |
при фиксированных значениях расстроек |
1 = 0, 1 = 10, 1 = 20 |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 27 -
Из графиков видно, что при увеличении 1 область |
|
Библиографический список |
устойчивости расширяется вдоль оси θ20. |
1. |
Применение гидравлических виброопор в синхронизующихся |
|
||
ЗАКЛЮЧЕНИЕ |
|
механических системах / Б.А. Гордеев, А.Б. Гордеев, Д.А. Коври- |
|
гин, А.В. Леонтьева // Приволжский научный журнал. 2009. № 3. |
|
Режим синхронизации, определяемый резонансным со- |
|
C. 49–53. |
отношением Ω1 – Ω2 = 0, обнаруженный во втором прибли- |
2. |
Причины возникновения синхронизации в рельсовом транспорте / |
жении, являетсяустойчивымстационарнымрежимом, более |
|
Б.А. Гордеев, А.Б. Гордеев, Д.А. Ковригин, А.В. Леонтьева // При- |
|
волжский научный журнал. 2009. № 4. С. 47–53. |
|
того, является режимом фазовой синхронизации (синхрон- |
|
|
3. |
Гордеев Б.А., Ковригин Д.А., Леонтьева А.В. Синхронизация вра- |
|
но-противофазный) двух двигателей, установленных на об- |
|
щения роторов двух двигателей на упругом основании // Вестник |
щемвязкоупругомосновании, роторыкоторыхвращаютсяв |
|
машиностроения. 2011. № 10. С. 3–7. |
одном направлении. Для системы трех несбалансированных |
4. |
Блехман И.И. Синхронизация динамических систем. М.: Наука, |
двигателей, работающих в режиме самосинхронизации |
|
1971. |
5. |
Блехман И.И. Самосинхронизация вибраторов некоторых вибра- |
|
(стационарный режим): Ω1 – Ω2 = 0, Ω2 – Ω3 = 0, выявлены |
|
ционных машин // Инженерный сборник. 1953. Т. 16. С. 75–80. |
области неустойчивости стационарных режимов колебаний |
6. |
Кононенко В.О. Колебательные системы с ограниченным воз- |
для двигателей равной мощности. Области неустойчивой |
|
буждением. М.: Наука, 1964. |
синхронизациидляэнергоемкихсистемможноувеличивать, |
7. |
Журавлев В.Ф., Климов Д.М. Прикладные методы в теории коле- |
используя для гашения вибрации управляемые магниторео- |
|
баний. М.: Наука, 1988. |
логические демпферы [10]. Система из четырех двигателей |
8. |
Гордеев Б.А., Леонтьева А.В. Исследование работы двух асин- |
вданной работе не рассматривалась, но, используя полу- |
|
хронных двигателей, установленных на упругом диссипативном |
|
основании // Вестник машиностроения. 2012. № 5. C. 19–23. |
|
ченные результаты, можно утверждать, что область неус- |
9. |
Экспериментальные исследования сопутствующих эффектов при |
тойчивостиихработырасширяется. |
|
синхронизации двух двигателей на упругом основании / Б.А. Гор- |
Благодарности |
|
деев, А.В. Леонтьева, А.Н. Осмехин, С.Н. Охулков, В.В. Бугай- |
|
ский // Вестник машиностроения. 2013. № 6. C. 39–42. |
|
Исследование выполнено за счет гранта Российско- |
10. |
Гордеев Б.А., Леонтьева А.В. Задача о вращении трех асинхрон- |
|
ных двигателей на упругом основании основании // Вестник |
|
го научного фонда (проект № 15-19-10026). |
|
машиностроения. 2012. № 9. C. 32–40. |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 28 -
УДК 621.314
Экспериментальное исследование электростанции на основе ДВС переменной частоты вращения
А.Б. Дарьенков
Нижегородский государственный технический университет им. Р.Е. Алексеева, Нижний Новгород, Россия
Experimental research of variable rotation speed ice-based electric power station
A.B. Dar’enkov
Nizhny Novgorod State Technical University n.a. R.E. Alexeev,
Nizhny Novgorod, Russian Federation
Разработка автономных электростанций на основе ДВС переменной частоты вращения, которые могут применяться для электроснабжения удаленных районов и автономных объектов, в силу своей недостаточной изученности представляет научный интерес. Актуальность разработки таких электростанций определяется тем, что их применение позволяет получить существенную экономию топлива, а также увеличить моторесурс ДВС.
Developing variable rotation speed ICE-based stand-alone electric power stations which can supply distant regions and autonomous objects with electricity are of scientific interest due to the insufficient study. The relevance of developing such electric power stations is determined by their usage is to provide a significant fuel saving as well as increase ICE motor service life.
Ключевые слова: электростанция, ДВС, синхронный генератор, преобразователь частоты.
Keywords: electric power station, frequency transducer, ICE, synchronous generator.
ВВЕДЕНИЕ
Значительная часть территории России, имеющая малую плотность населения, не присоединена к централизованной электроэнергетической системе. К таким территориям относятся Дальний Восток, Север, обширные пространства Сибири и некоторые другие регионы. Численность населения, проживающего на этих территориях, составляет около 10 млн человек. Основными источниками электроэнергии для них служат электростанции на основе системы «двигатель внутреннего сгорания (ДВС) – генератор» (Д-Г) [1].
ОСНОВНАЯ ЧАСТЬ
Д-Г электростанции, обладая высокой надежностью, достаточно большим моторесурсом и долговечностью,
незаменимы в качестве автономных источников основного и резервного электроснабжения. Однако топливо, необходимое для работы Д-Г, завозится из удаленных центров водным, автомобильным транспортом, а иногда вертолетами, что значительно повышает его стоимость. Кроме этого, доставка топлива в удаленные районы зачастую зависит от погодных условий, времени года, поэтому не всегда возможна. Для обеспечения электроэнергией вышеназванных районов используется более 50 тыс. Д-Г суммарной мощностью 17 млн кВт с выработкой электроэнергии более 50 млрд кВт·ч в год. Расход топлива этими электростанциями составляет около 6 млн т у.т. [1].
Д-Г электростанции также широко применяются в качестве резервных источников электроэнергии на территории России, охваченной единой энергетической системой. На автономных объектах, таких как суда гражданского флота, боевые корабли, локомотивы, автотранспорт и др. Д-Г электростанции являются, как правило, основными ирезервнымиисточникамиэнергии.
Таким образом, существенная доля электроэнергии вырабатывается автономными Д-Г электростанциями. Одной из важнейших задач современной России является ресурсосбережение, в частности, эффективное использование топливных ресурсов. Однако подавляющее большинство существующих Д-Г работают с постоянной (номинальной) частотой вращения вала во всем диапазоне изменения мощности нагрузки. В таких Д-Г стабилизация частоты переменного напряжения статора синхронного генератора (СГ) обеспечивается стабилизацией частоты вращения вала ДВС, а стабилизация амплитуды напряжения статора СГ – изменением тока в обмотке возбуждения [2]. При этом автономные Д-Г работают, как правило, на долевых режимах с нагрузкой в диапазоне от 30 до 70 % номинальной. Известно,
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 29 -

что ДВС, работая при постоянной частоте вращения, но при переменной нагрузке в основном работает с неоптимальным расходом топлива (с неоптимальным КПД) [2, 3]. Для обеспечения оптимального с точки зрения потребления топлива режима работы ДВС необходимо изменение частоты его вращения в зависимости от мощности нагрузки [3, 4].
Для выбора экономичного режима работы ДВС, работающего при изменяющейся нагрузке, удобно использовать его многопараметровую характеристику. На рис. 1 представлена типовая многопараметровая характеристика ДВС, на которой штрихпунктирной линией показана зависимость эффективного давления pe и эффективной мощности Ne от частоты вращения n вала ДВС при наименьшем удельном расходе топлива ge.
Разработки систем Д-Г переменной частоты вращения являются весьма перспективными. Работы в этом направлении лежат в рамках программ ресурсо- и энергосбережения, особо актуальных в настоящее время. ВРоссии данной проблематикой занимаются в г. СанктПетербурге (ОАО «Звезда»), в г. Москве (ЗАО «НПЦ малой энергетики»), в г. Коврове Владимирской области (ЗАО «Сигна»), в г. Томске (ФГБОУ ВПО «Национальный исследовательский Томский политехнический университет»), в г. Н. Новгороде (ФГБОУ ВПО «Нижегородский государственный технический университет им. Р.Е. Алексеева») и др. [4–11].
Существующие системы Д-Г переменной частоты вращения строятся по схеме, представленной на рис. 2 [5–7, 11]. В таких системах (см. рис. 2) частота напряжения на выходных выводах 6 стабилизируется на заданном уровне посредством преобразователя частоты (ПЧ) 5, состоящего из выпрямителя 3 и инвертора напряжения 4. Стабилизация амплитуды напряжения статора СГ 2, соединенного с валом ДВС 1, выполняется
Рис. 1. Типовая многопараметровая характеристика ДВС
путем воздействия системы управления 7 на величину тока обмотки возбуждения СГ 2, что является недостатком таких систем. С точки зрения топливной экономичности при изменении мощности нагрузки частоту вращения вала ДВС следует менять в широких пределах, при этом минимальная частота вращения вала может в несколько раз отличаться от номинальной частоты. Следовательно, и амплитуда напряжения СГ будет меняться в широком диапазоне, и ее минимальное значение будет в несколько раз меньше номинального значения. При этом способ стабилизации амплитуды напряжения статора СГ, основанный на воздействии на ток обмотки возбуждения, не обеспечит поддержания его на уровне номинального значения.
Интерес также представляют работы ряда зарубежных производителей Д-Г электростанций, таких как SDMO, Honda, Fubag, Hyundai, Kypor и др., которые выпускают инверторные электростанции. Инверторные электростанции обеспечивают меньшее потребление топлива благодаря наличию функции переключения ДВС в экономичный режим работы. Структурная схема инверторной электростанции приведена на рис. 3 [9]. Принцип ее работы заключается в следующем. ДВС приводит во вращение мультиполярный генератор, ротор которого представляет собой постоянный магнит. Переменное трехфазное напряжениестаторавыпрямляется с помощьювыпрямителя, на выходе которого установлен фильтр. Далее постоянное напряжение с помощью инвертора преобразуется в синусоидальное напряжение со стабильными частотой и амплитудой.
Под экономичным режимом работы в данном случае понимается перевод ДВС на пониженную частоту вращения при снижении нагрузки ниже определенного уровня (примерно ниже 50 % номинальной мощности). Инверторная электростанция оснащена специальным дросселем, который регулирует частоту оборотов ДВС в зависимости от мощности нагрузки, что позволяет сократить расход топлива на 20 %, но при относительно малых мощностях нагрузки (рис. 4). Стабильность параметров выходного напряжения электростанции обеспечивается с помощью инверторного блока. Колебания амплитуды напряжения не превышают 0,5 % [9].
|
|
|
|
|
|
|
|
|
|
Рис. 3. Структурная схема инверторной электростанции: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 – мультиполярный генератор (в разрезе); 2 – статор генератора; |
Рис. 2. Структурная схема Д-Г переменной частоты вращения: |
3 – ротор генератора; 4 – ПЧ; 5 – выпрямитель; 6 – фильтр; |
|||||||||
1 – ДВС; 2 – СГ; 3 – выпрямитель; 4 – инвертор напряжения; |
7 – инвертор; 8 – микропроцессорная система управления; |
|||||||||
|
5 – ПЧ; 6 – выходные выводы; 7 – система управления |
9 – выходные выводы |
||||||||
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 30 -