

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfT |
= |
J |
J |
ω0i si |
, |
C |
= |
Tмi |
J |
ω0i si |
. (5) |
||||
|
|
|
|
||||||||||||
мi |
|
β |
i |
|
M |
ci |
i |
|
R |
R |
M |
ci |
|||
|
|
|
|
|
|
|
нi |
нi |
|
||||||
Далее индекс i в обозначениях l0i, R0i, Rнi, Tmi, Ci будет опущен.
III. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СВОБОДНЫХ ПРОЦЕССОВ
Электромагнитная система АД с приведенной нагрузкой (см. рис. 3, б) имеет резонансный характер. Индуктивность l0 ветви намагничивания и емкость С образуют параллельный контур, в котором возможен резонанс токов. Индуктивности L1 и L2 полей рассеивания статора и ротора совместно с емкостью С образуют последовательный контур, в котором возможен резонанс напряжений. Энергия намагничивания полей, представленных элементами l0, L1, L2, теоретически может быть самостоятельным источником колебательных процессов в АД.
Переходя к количественному анализу, рассмотрим систему однородных дифференциальных уравнений, составленную по схеме (см. рис. 3, б) методом узловых потенциалов в операторной форме:
0 |
z0−1 |
+ z1−1 + z2−1 |
|
−z2−1 |
|
φ0 |
|
(6) |
|
|
= |
−1 |
−1 |
−1 |
|
|
|
|
|
0 |
|
−z2 |
z2 |
+ Rн |
+ pC |
φн |
|
|
|
где zi−1 = 1 (Ri + pLi ) – проводимости соответствующих
(Ri + pLi ) – проводимости соответствующих
ветвей, Li / Ri – высокочастотные постоянные времени. Определитель системы уравнений представляет собой отношение двух полиномов третьего порядка: (p) = = D(p) / M(p). Нас интересует собственный оператор D(p), имеющий следующую функциональную зависимость от параметра дифференцирования p:
D ( p) = 0 (1+ A1 p + A2 p2 + A3 p3 ), |
(7) |
где Аi – коэффициенты, зависящие от параметров и режи- |
|
маАД; |
0 – определительматрицыактивныхэлементов: |
|
0 = Rн (R0 + R1 ) + 00 , |
где 00 |
= R0 R1 + R0 R2 + R1 R2 . Реактивные элементы |
входят в D(p) в виде низкочастотных постоянных времени Ti = Li  RiΣ , где RiΣ – сопротивление схемы отно-
RiΣ , где RiΣ – сопротивление схемы отно-
сительно Li на синхронной частоте ω0 = 0. Их значения приведены в табл. 1.
Выразим коэффициенты А1, А2, А3 через постоянные
времени реактивных элементов: |
|
|
|
|
|
|
|
||||||||||||||
A |
= T |
|
+ T |
+ T |
+ T |
|
|
|
|
|
= |
|
|
|
|
|
|||||
|
1 |
|
0 |
|
|
1 |
|
2 |
|
м |
|
00 |
|
0 |
|
|
|
|
|
|
|
= L0 R0Σ + L1 R1Σ + L2 R2Σ + TM 00 |
0 , |
|
|||||||||||||||||||
|
|
= K01 T0 T1 + K02 T0 T2 |
+ K12 T1 T2 + |
(8) |
|||||||||||||||||
A2 |
|||||||||||||||||||||
+T |
|
(T |
|
K |
0M |
+ T |
K |
|
+ T |
K |
2M |
), |
|
|
|||||||
|
м |
|
0 |
|
|
1 |
|
1M |
|
|
2 |
|
|
|
|
|
|||||
A |
= T |
|
(K |
01 |
T |
T |
+ K |
02 |
T |
T |
+ K |
T T ). |
|||||||||
|
3 |
|
м |
|
|
|
0 |
|
1 |
|
|
|
0 |
|
2 |
|
12 |
1 |
2 |
||
Таблица 1
Низкочастотные постоянные времени
|
Ti |
|
|
|
|
|
|
|
RiΣ |
|
|
|
|
|
|
L R |
|
|
|
R + R (R + R |
) |
R + (R + R |
) |
|
|||||||
0 |
0Σ |
|
0 |
|
1 2 |
|
н |
1 |
2 |
н |
|
|
|||
L R |
|
(R + R ) |
(R + R |
) |
(R + R ) + (R + R |
) |
|||||||||
1 |
1Σ |
|
0 |
|
1 |
2 |
н |
|
0 |
1 |
2 |
н |
|
||
|
|
|
|
[R0 R1 ] [R0 + R1 ]+ R2 + Rn |
|
|
|||||||||
L2 R2Σ |
|
|
|
|
|
||||||||||
C RcΣ |
|
|
|
|
|
Rn |
00 |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
||
|
|
Коэффициенты взаимосвязи постоянных времени |
|
|
|||||||||||
|
|
|
|
|
|
|
[R0Σ R1Σ ] |
|
|
|
|
||||
|
K01 |
|
|
|
|
|
0 |
|
|
|
|||||
|
|
|
|
|
|
|
[R0Σ R2Σ ] |
|
|
|
|
||||
|
K02 |
|
|
|
|
|
0 |
|
|
|
|||||
|
|
|
|
|
|
|
[R1Σ R2Σ ] |
|
|
|
|
||||
|
K12 |
|
|
|
|
|
0 |
|
|
|
|||||
|
|
|
|
|
|
|
(R + R ) R |
|
|
|
|
||||
|
K0M |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
1 |
|
2 |
0 |
Σ |
0 |
|
|
||
|
|
|
|
|
|
|
(R + R ) R |
|
|
|
|
||||
|
K |
1M |
|
|
|
|
0 |
|
|
||||||
|
|
|
|
|
|
|
0 |
2 |
1Σ |
|
|
||||
|
K |
2M |
|
|
|
|
(R + R ) R |
|
0 |
|
|
||||
|
|
|
|
|
|
|
0 |
1 |
2 |
Σ |
|
|
|||
Коэффициенты взаимосвязи постоянных времени приведены в табл. 2.
IV. ОБОБЩЕННЫЕ ПОКАЗАТЕЛИ ДИНАМИЧЕСКИХ СВОЙСТВ АД
Приравняв собственный оператор D(p) к нулю, получим характеристическое уравнение системы однородных дифференциальных уравнений. Учитывая ее порядок и вероятность резонансных процессов, представим характеристическое уравнение в следующем виде:
(1+ τ1 p)(1+ 2ξ τ2 p + τ22 p2 ) = 0 . |
(9) |
Учтем, что оператор D(p) – знаменатель передаточных функций АД. Тогда первый сомножитель образует апериодическое, а второй – колебательное звенья характеристического уравнения. Постоянные времени τ1, τ2 и коэффициент затухания ξ достаточно полно отражают динамические свойства АД как объекта управления. Выбрав их в качестве обобщенных показателей, рассмотрим задачу исследования взаимосвязи τ1, τ2 и ξ с коэффициентами оператора D(p) и физическими параметрами электромагнитной системы АД. Аналитическое решение этой задачи возможно лишь в частных случаях. Основной метод анализа – численное моделирование.
V. ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ИССЛЕДОВАНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АД
Постоянные времени τ1, τ2 и коэффициент затухания ξ зависят в общем случае от нагрузки (Mc, J), скоростного режима (ω0, s) и параметров АД (Ri, Li). Большая часть фак-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 101 -
торов может изменяться в широких пределах. Многовариантность режимного состояния электромагнитной системы АД приводит к необходимости автоматизации численных расчетов и создания соответствующего программного обеспечения. К числу основных блоков программного комплекса относятся модуль исходных данных, модуль расчета установившихся режимов, модуль расчета переменных (дифференциальных) параметров, модуль расчета коэффициентов полинома D(p), модуль расчета обобщенных динамических показателей τ1, τ2 и ξ, модуль графического отображения функциональной зависимости τ1, τ2, ξ идругих показателей от исследуемыхфакторов.
VI. ОСНОВНЫЕ ЗАКОНОМЕРНОСТИ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АД
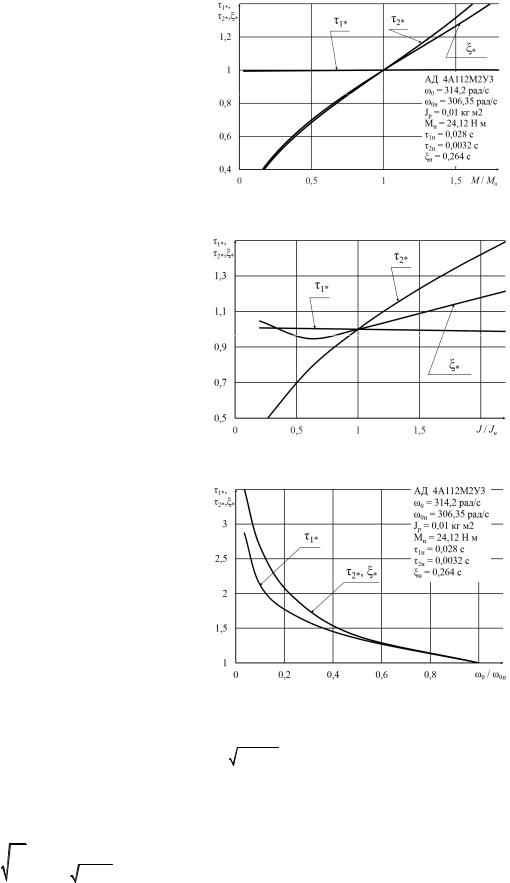
Рис. 4. Зависимости обобщенных динамических показателей от момента сопротивления нагрузки
Выберем номинальный режим АД и соответствующие ему параметры ω0н, sн, Мн, Liн, Riн в качестве базовых. Примем, что динамическая индуктивность ветви намагничивания l0н = 0,2 L0н, а номинальный момент инерции нагрузки Jн = 5Jр, где Jр – момент инерции ротора. Значения искомых величин, полученные для номинальных условий, будем считать номинальными: τ1н, τ2н
иξн. Результаты численных исследований будем представлять в нормированном виде: τ1* = τ1/τ1н, τ2* = τ2/τ2н
иξ* = ξ/ξн. Ограничим нагрузочный и скоростной режимы АД диапазонами (0…2Мн) и (0…ω0н), а изменение момента инерции J = Jн (1 + kj) кратностью kj < 10. Исследование выполним по техническим данным двухполюсных АД серии 4А основного исполнения [6]. Полученный таким образом численный материал представим в графическом виде (рис. 4, 5, 6), что позволяет определить достаточнообщие свойствадинамических характеристик АД.
Постоянные времени высокодинамичных исполнительных устройств не должны превышать единиц миллисекунд. Данные исследований показывают, что АД общепромышленного назначения не удовлетворяют такому
требованию из-за большой постоянной времениτ1 апериодического звена (τ1н = 0,028 с). Кроме того, электромеханическое преобразование энергии сопровождается резонансными процессами. Рекомендация В.И. Ключева [7] о возможности замены колебательного звена апериодическими, если ξ > 0,4, выполняется лишь в режимах малых скоростей или больших статических и инерционных нагрузок. Динамические характеристики АД имеют более высокую степень нелинейности по сравнению с рабочими характеристиками. Инерционность АД в зоне малых скоростейсущественно возрастает.
VII. ЭЛЕКТРОПРИВОД С КВАЗИНЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ АД
Постоянная времени τ1н характеристического уравнения больше τ2н, и такое соотношение справедливо для большинства режимных состояний АД. Данный фактор позволяет получить оценочную взаимосвязь обобщенных показателейскоэффициентамиD (p). Еслиτ1 >> τ2, то
τ1 A1 , τ2 |
|
A3 |
, |
ξ |
A1 A2 − A3 |
. |
(10) |
A1 |
|
||||||
|
|
|
|
2 A1 A3 |
|
||
Рис. 5. Зависимости обобщенных динамических показателей от момента инерции нагрузки
Рис. 6. Зависимости обобщенных динамических показателей от синхронной частоты вращения
Дальнейшее упрощение показывает, что τ1 ≈ T0, τ2 K01T1Tm . Инерционность ветви намагничивания
оказывает наибольшее влияние на τ1 апериодического звена, а инерционность нагрузки – на τ2 колебательного звена. Методы повышения быстродействия АД необходимо направить прежде всего на уменьше-
ние |
постоянной |
|
времени |
ветви намагничивания |
|||
T = l / R + R || (R |
|
+ R |
) . |
Дифференциальная ин- |
|||
0 |
0 |
0 1 |
2 |
н |
|
|
|
дуктивность l0 может изменяться в широких преде-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 102 -
лах. В номинальном режиме (на границе зоны насыщения магнитной характеристики) l0 = L0н / (3…5), где L0н – статическая индуктивность. В режимах ослабления магнитного поля (энергосберегающее управление, вторая зона регулирования) l0 ≈ L0н. В системах векторного управления [8] l0 ≈ l0н ± (50…75) %.
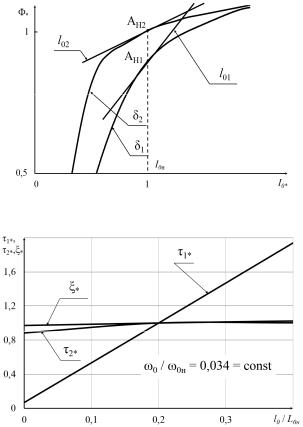
Рассмотрим комплекс мер, позволяющих повысить быстродействие АД. На рис. 7 приведены магнитные характеристики АД1 и АД2 с воздушными зазорами δ1 > δ2 соответственно.
Будем считать, что при одинаковом токе намагничивания I0н и магнитопроводе, выполненном, например, из аморфной стали [9], энергетические показатели АД окажутся близкими [10]. Рабочий режим АД2 смещен
всторону большего насыщения магнитной цепи. Диф-
ференциальная индуктивность l02 существенно меньше l01. Одновременно повышается стабильность динамических параметров АД. Уменьшить доминирующую
постоянную времени T0 можно структурными методами. Обратимся к двухканальной системе управления электроприводом, рассмотренной в [3]. Приведенные
встатье алгоритмы управления позволяют регулировать амплитуду трехфазного напряжения адаптивно по отношению к синхронной частоте. Если реализовать канал управления амплитудой напряжения по критерию
Рис. 7. Зависимости магнитного потока от тока намагничивания АД: АН – координата номинального режима
Рис. 8. Динамические характеристики в зоне малых скоростей
I0 = const, dI0 / dt = 0, то энергия рабочего магнитного потока согласно (2) будет постоянной, а динамическая мощность PL0 близка к нулю. Нейтрализация влияния энергии WL0 в переходных процессах означает перевод АД в режим квазинезависимого возбуждения. Управление напряжением должно осуществляться с достаточным быстродействием и астатизмом.
Динамические свойства АД в таком режиме можно оценить, полагая в характеристическом уравнении l0 = 0. На рис. 8 приведены данные исследования динамических параметров АД в наиболее проблемной по быстродействию зоне малых скоростей. Стабилизация основного магнитного потока АД позволяет получить достаточно высокие динамические показатели в зоне малых скоростей (ω0/ω0н = 0,034, τ1* = = 0,14, τ2* = 3,69, ξ* = 2,65) и существенно улучшить динамику в номинальных режимах (ω0/ω0н = 1, τ1* = 0,067,
τ2* = 0,88, ξ* = 0,97).
ЗАКЛЮЧЕНИЕ
Рассмотрена взаимосвязь коэффициентов полинома собственного оператора системы однородных дифференциальных уравнений с физическими параметрами двигателя. Показано, что характеристическое уравнений математической модели двигателя можно представить в виде произведения апериодического и колебательного звеньев. Рассмотрены принципы построения электропривода с квазинезависимым возбуждением асинхронного двигателя.
Библиографический список
1.Беспалов В.Я., Котеленец Н.Ф. Электрические машины. М.: Ака-
демия, 2010. 424 с.
2.Вольдек А.И., Попов В.В. Электрические машины. Машины переменного тока. СПб.: Питер, 2007. 350 с.
3.Смолин В.И., Топольская И.Г. Теория обобщенного энергопотока трехфазных электромеханических преобразователей в задачах управления электроприводом // Тр. VIII Междунар. (XIX Всероссийской) конф. по автоматизированному электроприводу АЭП-2014.
Т. 1 Саранск, 2014. С. 111–115.
4.Smolin V.I., Topol’skaya I.G. Amplitude control of the moment of a three-phase asynchronous drive based on generalized energy-flow principles // Russian Electrical Engineering. 2014. Vol. 85. No. 4. P. 205–209.
5.Кенио Т., Нагамори С. Двигатели постоянного тока с постоянными магнитами: пер. с англ. М.: Энергоатомиздат, 1989. 184 с.
6.Асинхронные двигатели серии 4А: справочник / А.Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская. М.: Энергоиздат, 1982. 504 с.
7.Ключев, В.И. Теория электропривода. М.: Энергоатомиздат, 1985. 560 с.
8.Виноградов А.Б. Векторное управление электроприводами переменного тока / Иван. гос. энерг. ун-т им. В.И. Ленина. Иваново, 2008. 298 с.
9.Филиппов А.Е., Соснин В.В. Энергосберегающие трансформаторы с магнитопроводами из аморфных сплавов // Энергоэксперт. 2012. № 2. С. 52–54.
10.Казаков Ю.Б. Энергоэффективность работы электродвигателей и трансформаторов при конструктивных и режимных вариациях: учебное пособие для вузов. М.: Изд-во МЭИ, 2013. 152 с.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 103 -
УДК: 62-83
Некоторые вопросы терминологии в теории и практике электропривода – электротехнике
В.М. Ткачев
Ивановский государственный политехнический университет, Иваново, Российская Федерация
Questions of terminology in theory and practice of electric drive systems and electrotehnic
V.M. Tkachev
Ivanovo State Polytechnic University,
Ivanovo, Russian Federation
Рассматриваются вопросы несоответствия некоторых сложившихся технических терминов в отрасли электропривода закону единства формы и содержания в отношении элементной базы объектов.
The report discusses some of the inconsistencies of the prevailing of technical terms in the industry of the electric drive of unity of form and content of the Act in respect of the element.
Ключевые слова: электропривод, переменный ток, магнитный поток, импульсное регулирование, дифференциальный электропривод, линейный электропривод.
Keywords: electric, alternating current, the magnetic flux, impulse control, differential electric, linear actuator.
В сложившейся терминологии ряда направлений электротехники и электропривода нет соответствия между названием и реально протекающим физическим процессом, составом элементной базы технических устройств. Это затрудняет проведение конструкторских разработок, оформление заявок на изобретения, грамотную подготовку и обучение инженерных кадров.
Так, например, в ГОСТ Р 50369–92 (дата введения 1993-07-01). «Общие понятия. Электропривод: структура электропривода» в п. 40 записано, что дифференциальный электропривод – «многодвигательный электропривод, у которого скорость и момент на исполнительном органе рабочей машины алгебраически суммируются с помощью механического дифференциала» [1, 2].
Насколько точна такая формулировка? Почему суммируются скорость и момент, почему скорость и момент суммируются «алгебраически» (с учетом знака), почему привод «многодвигательный», а «рабочий орган» – один (численное несоответствие), почему «дифференциал механический», а привод электрический?
Но если эти замечания несут, возможно, формальный характер, то в п. 40 ГОСТ Р 50369-92 совершенно искажена физическая основа дифференциального электропривода (ЭД):
1.ЭД как аналог механического дифференциала (МД) содержит только два двигателя (мотора)
2.В ЭД, как и в МД, происходит не «суммирование», а перераспределение движущего момента двигателя и частот вращения между приводными валами двух независимых механизмов, например, приводными колесами в автотранспорте.
3.ЭД заменяет МД т.е. п. 40 ГОСТ Р 50369-92 со-
держит два взаимоисключающих друг друга признака (ЭД и МД).
В п. 44 ГОСТ Р 50369-92 «Многодвигательный электропривод» записано: «Электропривод, содержащий несколько электродвигателей, механическая связь между которыми осуществляется через исполнительный орган рабочей машины».
Выделение в таком приводе в качестве связующего элемента в независимых механизмах их «исполнительных органов» исключает громадный класс оборудования – поточные линии, в которых определяющим признаком является связь между независимыми механизмами, а сама связь осуществляется, например, тканью, пленкой, другими гибкими материалами.
Именно эта технологическая связь определяет принципы построения системы многодвигательного автоматизированного электропривода и вряд ли можно назвать указанную в п. 44 связь «механической».
Примером «технологической связи», которую можно назвать «механической», в многодвигательном электроприводе можно назвать волочильные станы по изготовлению проволоки, где соотношение скоростей
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 104 -
подачи связующего материала между рабочими валками механизмов программируется, но это скорее частный случай.
Может быть в понятие многодвигательный привод определять по числу технологически связанных двигателей? Можно ли считать систему электропривода перематывающих механизмов (накат-раскат) с двумя двигателями «многодвигательным» электроприводом?
Объединяющим признаком асинхронных двигателей (АД) и так называемых линейных асинхронных двигателей (ЛАД) является магнитопровод с трехфазной обмоткой, только в ЛАД он разомкнут. Форма его может быть плоской (линейной) изогнутой, дугообразной (по окружности).
Практически ЛАД является индуктором с многофазной обмоткой переменного тока. По определению этого источника информации индуктором считают «наэлектризованное тело при прикосновении к которому возникает ток».
«Линейный двигатель» – электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развернутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) таких устройств, использующих принцип бегущего магнитного поля: линейные синхронные электродвигатели, линейные электромагнитные двигатели, линейные магнитоэлектрические двигатели, линейные магнитострикционные двигатели, линейные пьезоэлектрические (электрострикционные) двигатели и др.
Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающую энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, т.к. слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
ЛАД широко используются как для больших перемещений (транспорт), так и в исполнительных механизмах для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий [1, 2].
Как видим, речь идет о значительном классе оборудования, о серийно выпускаемых изделиях электротехнической отрасли! А где «вторичное тело» ЛАД? Неужели промышленность должна комплектовать и рабочие органы механизмов (вторичное тело), взаимодействующее с индуктором? Приведу курьезный пример заявки на предполагаемое изобретение, где авторы предложили фактически виртуальный двигатель – АД особо большой мощности, состоящий из многих ЛАД. Реально речь идет о многих 3-фазных индукторах, вписываемых в механизм. Экспертиза Федерального института патентной собственности (ФИПС) ответила так: «не обеспечивает возможности понимания
специалистом на основании уровня техники ее смыслового содержания».
Дело в том, что классический ЛАД не является
взаконченном виде двигателем, это часть последнего, которая сама по себе ничего не может двигать. Тогда, возвращаясь к начальной терминологии, ЛАД (разомкнутый магнитопровод с 3-фазной обмоткой) является только частью асинхронного, синхронного двигателя, предложенного Доливо-Добровольским и Тесла, ее следует назвать индуктором. По определению социальных информационных сетей, «индуктор – наэлектризованное тело, от прикосновения к которому мгновенно возбуждается индукционный ток». Только
всочетании с вторичным телом возникает движущий момент. Слово «линейный» как-то согласуется с ЛАД, используемым в приводе железнодорожного транспорта, поскольку он имеет плоский магнитопровод, взаимодействующим с прямым рельсом, а вот словосочетание «изогнутый линейный асинхронный двигатель» в патенте WO2010119357 A2 является полным
абсурдом. Приняв ошибочную терминологию, авторы
вформуле изобретения заявили «Способ формирования магнитного поля в 3-фазном асинхронном двигателе большой мощности», который существует только
в«виртуальном» смысле. Если вещи называть своими именами, в описании изобретения рассмотрены способ и устройство получения расчетного движущего момента в безредукторном электроприводе колеса автотранспорта особо большой грузоподъемности путем объединения индукторов (измененное название ЛАД) с значительно меньшими весо-габаритными показателями, чем эквивалентный по мощности асинхронный двигатель. Предложено вписать конструктивно их в колесо так, чтобы соотношение между магнитодвижущими силами индукторов и точками их приложения (радиус) было оптимальным. Нелогично рассматривать промежуточные этапы процесса: магнитное поле – магнитодвижущая сила.
Очевидно, что реально создать 3-фазный асинхронный двигатель до 100 кВт, статор которого состоит из набора этих ЛАД, страдающих «краевым» эффектом (вспучивание магнитных полей), большими поперечными усилиями, т.е. низкой энергетикой, невозможно. В то же время уход от многотонных двигателей в современных транспортных электроприводах особенно актуален.
Вп. 52 ГОСТа «Электропривод с импульсным преобразователем» записано: «электропривод, преобразователь электроэнергии которого периодически с регулируемой скважностью включает и отключает подводимое к электродвигателю напряжение или изменяет параметры электрической цепи двигателя» [1, 2]. Почему в п. 52 нет термина «магнитные цепи в электродвигателе» электропривода – как преобразователя электромагнитной энергии?
Кроме того, в ряде случаев в автономных установках с энергетическими источниками потребителями импульсного тока и/или аккумуляторного типа, часто возникает задача повышения уровня переменного на-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 105 -
пряжения, что практически невозможно без операций инвертирования, трансформации и последующего преобразования средствами широтно-импульсной модуляции (ШИМ) [10–14]. Рассмотрение магнитных цепей в электродвигателях особенно важное значение имеет при использовании в управлении электропривода ши- ротно-импульсной модуляции.
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения в интервале периода преобразования. Управление средним значением в этом случае производится путем изменения скважности импульсов.
Имеющаяся возможность возврата энергии скольжения в общий энергоисточник существенно повышает энергоэффективность привода. Особенно в тех случаях, когда используется автоматизированные многодвигательные электроприводы [3–9] Использование ШИМ в автоматизированном электроприводе позволяет влиять на процесс управления мощностью, подводимой к нагрузке, путем изменения скважности импульсов при постоянной и/или изменяемой частоте в широком диапазоне нагрузок привода.
Таким образом, выявление закономерностей терминов в процессах инвертирования, трансформации и выпрямления, присущих статическим и электродинамическим элементам с ШИМ, с учетом нелинейного характера преобразований, обусловленного дискретизацией питающих напряжений отдельных устройств, а также установление связи рекуперативных свойств привода с режимами работы АД, ЭД, МД, ЛАД, является важной и актуальной задачей, решение которой может быть осуществлено на основе анализа трехфазных систем напряжений, характерных и для промышленных устройств энергоснабжения и асинхронных, синхронных электродвигателей [10–14].
Рассмотрим для примера ГОСТР 52002–2003 (дата введения 9 января 2003 г. № 3-ст) «Электротехника. Термины и определения основных понятий».
В стандарте ГОСТР 52002–2003 определены фундаментальные значения, которыми можно описать физические процессы в электрическом дифференциале с асинхронными и/или синхронными многодвигательными электроприводами:
п. 12 «магнитный поток – скалярная величина, равная потоку магнитной индукции»;
п. 23 индуктированное электрическое поле – электрическое поле, возбуждаемое изменением во времени магнитного поля;
п. 71 векторный магнитный потенциал – векторная величина, ротор которой равен магнитной индукции;
п. 74 электромагнитная индукция – явление возбуждения электродвижущей силы в контуре при изменении магнитного потока, сцепляющегося с ним;
п. 75 самоиндукция – электромагнитная индукция, вызванная изменением сцепляющегося с контуром магнитного потока, обусловленного электрическим током в этом контуре;
п. 76 взаимная индукция – электромагнитная индукция, вызванная изменением сцепляющегося с контуром магнитного потока, обусловленного электрическими токами в других контурах и понятия, относящиеся к электрическим и магнитным свойствам сред;
п. 117 потокосцепление взаимной индукции – потокосцепление одного элемента электрической цепи, обусловленноеэлектрическимтокомвдругомэлементецепи;
п. 118 взаимная индуктивность – скалярная величина, равная отношению потокосцепления взаимной индукции одного элемента электрической цепи к электрическому току в другом элементе, обусловливающему это потокосцепление;
п. 151 комплексное мгновенное значение (синусоидального электрического) тока – комплексная величина, зависящая от времени, модуль и аргумент которой равны соответственно амплитуде и аргументу данного синусоидального электрического тока.
Примечание. Аналогично определяют комплексные мгновенные значения синусоидальных электрического напряжения, магнитного потока, электрического заряда и т.д.
п. 152 комплексная амплитуда (синусоидального электрического) тока – комплексная величина, модуль
иаргумент которой равны соответственно амплитуде
иначальной фазе данного синусоидального электрического тока.
Примечание. Аналогично определяют комплексные амплитуды синусоидальных электрического напряжения, магнитногопотока, электрического зарядаит.д.
п. 153 комплексное действующее значение (синусоидального электрического) тока – комплексная величина, модуль которой равен действующему значению синусоидального электрического тока и аргумент которой равен начальной фазе этого электрического тока.
Примечание. Аналогично определяют комплексные действующие значения синусоидальных электрического напряжения, магнитного потока, электрического заряда ит.д.
п. 160 многофазная система электрических токов – совокупность синусоидальных электрических токов одной частоты, сдвинутых друг относительно друга по фазе действующих в многофазной системе электрических цепей.
Примечание. Аналогично определяют многофазные системы электрических напряжений, электродвижущих сил, магнитных потоков и т.д.
В п. 161 представлена трехфазная система электрических токов: многофазная система электрических токов при числе фаз, равном трем.
Примечание. Аналогично определяют трехфазные системы электрических напряжений, электродвижущих сил, магнитных потоков и т.д.» далее по аналогии «Примечание» повторяется в терминах переходного процесса в п.п. 151–161 и 263–271 ГОСТР 52002–2003.
В электротехнике известен так называемый биротативный двигатель: в одном статоре расположены два одинаковых ротора, связанных между собой не механи-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 106 -
чески, а только общим электромагнитным полем. Оси роторов совпадают, а ведущие валы выходят каждый
всвою сторону: у левого ротора – в левую, у правого –
вправую, образуют электромеханическую систему электропривода с представлением, по мнению авторов,
ввиде электрического дифференциала [15].
Нечеткое изложение в стандарте ГОСТР 52002–2003 электротехнических терминов, приведенных выше, используют в описании процессов в ЭД, АД такие серьезные авторы Г.М. Водяник и Э. Рылеев [15] при описании биротативного асинхронного двигателя, считая, что такая система биротативного асинхронного двигателя ошибочно является электрическим дифференциалом. Однако описанный в [15] такой биротативный двигатель не является ЭД. В нем происходят процессы не распределения механических нагрузок меду валами АД, а суммирование нагрузок двух независимых механизмов, на который реагирует общий магнитный поток статора биротативного асинхронного двигателя. Таким образом, рассмотренный АД как якобы электрический дифференциал позволяет только балансировать электромагнитной энергии от источника общего электромагнитного поля между нагрузками (роторов) биротативного двигателя с определенными силовыми моментами и потерями энергии в электромагнитных и электромеханических системах в соответствии с законами электродинамики физических процессов, в приведенном примере [15] – процессов электрического биротативного асинхронного двигателя.
Требуется расширить понятия в приведенных пунк-
тах: 151–161 и 263–271 ГОСТР 52002–2003.
В п. 161 «Примечание», возможно, требуется корректировка: например, трехфазная, двухфазная, многофазная система и переходные процессы могут быть в различных физических системах и объектах, в электрических, магнитных, электромагнитных, электромеханических цепях, например, в связанных, несвязан-
ных, многодвигательных автоматизированных электроприводных системах.
Предлагаем организаторам конференции АЭП-2016 поставить вопрос «о терминологии» в научно-техничес- ких кругах, среди специалистов, занимающихся АЭП.
Библиографический список
1.ГОСТ Р 50369-92. Электроприводы термины и определения.
М., 1992.
2.ГОСТ Р 52002-2003. Термины и определения основных понятий.
М., 2003.
3.Пастин С.В., Князев Ю.Б. Электрический дифференциал в перематывающих механизмах // Электричество. 1968. № 8. С. 53–56.
4.А.с. 1123905, AI SU, МПК5 B 60L 15/20. Устройство для регулирования соединенных тяговых двигателей ведущих колес транспортного средства/ В.И. Шафранский (Белоруссия) № 3516789/24-11;
заявл. 2.11.1982; опубл. 15.11.1984. Бюл. № 42. 3 с.
5.А.с. 692049 СССР, М.Кл2 H 02 P 7/68. Многодвигательный электро-
привод постоянного тока / В.А. Гусев, С.В. Пастин (СССР). –
№2354009/24-07; заявл. 03.05.1976; опубл. 15.10.1979, Бюл. №38. 3с.
6.Пастин С.В., Князев Ю.В. Электрический дифференциал в поточных линиях // Электричество. 1972. № 12. С. 53–5.
7.Архангельский Н.Л., Курнышев Б.С., Виноградов А.Б. Новые алгоритмы в управлении асинхронным электроприводом // Электротехника. 1991. № 10. С. 9–13.
8.Бродовский В.Н. Приводы с частотно-токовым управлением. М.:
Энергия, 1974. 168 с.
9.Бродовский В.Н. Приводы с частотно-токовым управлением. М.:
Энергия, 1974. 168 с.
10.Домбровский В.В., Зайчик В.М. Асинхронные машины: Теория, расчет, элементы проектирования. Л.: Энергоатомиздат. Ленингр.
отд-ние, 1990. 368 с.
11.Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. М.: Госэнергоиздат, 1963. 744 с.
12.Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводысвекторнымуправлением. Л.: Энергоатомиздат, 1987. 134 с.
13.Зайцев В.П., Панин И.Н. Исследование процесса формирования бобин сотовой намотки на машине «Бандомат» // Изв. вузов. Технология текстильной промышленности. 1983. № 3. С. 51–55.
14.Глазунов В.Ф., Виноградов А.Б., Шишков К.С. Асинхронный электропривод механизма формирования сновальных валов //
Вестник ИГЭУ. 2011, № 1. С. 83–87.
15.Водяник Г., Рылеев Э. Вездесущий дифер [Электронный ресурс]. URL: http: //n-t.ru/tp/nr/ed.htm (дата обращения: 11.02.2000).
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 107 -
УДК 62-833
Дифференциальные уравнения электропривода с автономным источником питания
Л.Н. Токарев
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ», Санкт-Петербург, Россия
Differential equations of the electric drive system with independent power supply
L.N. Tokarev
Saint Petersburg State Electrotechnical University «LETI»,
Saint-Petersburg, Russian Federation
Приведено математическое описание электрооборудования системы электропривода с автономным источником питания: асинхронного исполнительного электродвигателя и синхронного генератора с автоматическим регулятором напряжения. Уравнения генератора преобразованы таким образом, чтобы можно было составить его макромодуль без искусственного балластного сопротивления, используемого
в MatLab/Simulik.
The report shows the mathematical description of the electrical equipment of the electric drive system with autonomous power source: asynchronous motor executive, synchronous generator with automatic voltage regulator. Equation generator converted so that you can compose his macro module without artificial-ballast used in Matlab/Simulink.
Ключевые слова: электропривод, асинхронный двигатель, синхронный генератор, автоматический регулятор напряжения, дифференциальные уравнения, преобразование уравнений генератора.
Keywords: electric, induction motor, synchronous generator, automatic voltage regulator, differential equations, conversion equations generator.
Вэлектроприводе автономный источник питания
ввиде синхронного генератора вращается первичным двигателем, дизелем или турбиной. Напряжение генератора подается на электродвигатель привода.
Рассмотрим математическое описание указанного электропривода.
Вэлектроэнергетике дифференциальные уравнения синхронного генератора в осях d-q, работающего в режиме параллельной работы с сетью бесконечной мощности, записываются следующим образом:
Ud = –r·id + w·Fq + p·Fd / wb;
Uq = –r·iq + w·Fd – p·Fq / wb;
Ur = ir + Tr·p·Fr;
0 = ird + Trd·p·Frd;
0 = irq + Trq·p·Frq;
Fd = ir – xd·id + ird; Fq = xq·iq + irq;
Fr = ir – md·xd·id + g1·ird;
Frd = ird + g2·ir – mds·xd·id;
Frq = irq + mq·xq·iq.
Программа для решения этих уравнений должна начинаться с интегрирования первых двух уравнений. Необходимо записать эти уравнения в виде
p·Fd = (Ud + r·id – w·Fq) ·wb,
p·Fq – (Uq + r·iq – w·Fd) ·wb.
Из записи следует, что входной величиной макромодуля синхронного генератора может быть только напряжение. В то же время в электроприводе с автономным источником питания напряжение должно быть выходной координатой.
Указанное затруднение в пакете Matlab/Simulik преодолевается с помощью искусственного приема, который заключается в том, что уравнения синхронного генератора записываются уже в режиме холостого хода с некоторой нагрузкой в виде чисто активного балластного сопротивления. Величина этого сопротивления выбирается достаточно большой, чтобы минимально влиять на результат решения.
В статье показано, как представить математически корректно уравнения, записанные для режима параллельной работы с сетью бесконечной мощности, в виде, соответствующем режиму автономной работы генератора. В режиме автономной работы напряжение генератора, очевидно, должно быть выходной величиной.
Ниже представлены преобразованные дифференциальные уравнения синхронного генератора в осях d–q
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 108 -
для использования при исследованиях электропривода с автономным источником питания.
p·Fr = (ur – ir) / Tr;
ir = Fr + md·xd·id – g1·ird; Q = 1 / (1 – g1·g2);
ird = Q (Frd – g2·Fr + mds (1 – g1) xd id); p·Frd = – ird / Trd;
irq = Frq – mq·xq·iq;
p·Frq = – irq / Trq;
kf = (1 – g2) ·Fr + (1 – g1) Frd;
kpf = (1 – g2) ·p·Fr + (1 – g1) p·Frd Fd = Q·kf – xd2s·id;
Fq = Frq + xq2s·iq;
p·Fd = Q·kpf – xd2s·p·id; p·Fq = p·Frq + xq2s·p·iq;
Uq = –r·iq + w·Fd – p·Fq / wb;
Ud = –r·id + w·Fq + p·Fd / wb,
где Uq, Ud – составляющие напряжения статора синхронного генератора по осям d и q;
id, iq – составляющие тока статора по осям; ur – напряжение на обмотке возбуждения; ir – ток возбуждения;
Hr – напряженность магнитного поля возбуждения; Fr – потокосцепление обмотки возбуждения;
Fd, Fq – составляющие потокосцепления статора по осям;
Frd, Frq – составляющие потокосцепления статора по осям;
ird, irq – составляющие тока демпферной обмотки по осям;
r – активное сопротивление обмотки статора;
xd, xq – синхронные реактивности статора по осям; xds – переходная реактивность;
xd2s, xq2s – сверхпереходные реактивности по осям; xs – реактивность рассеяния статора;
md, mq, mds, g1, g2 – коэффициенты магнитной связи обмоток;
Tr – постоянная времени обмотки возбуждения;
Trd – постоянная времени демпферной обмотки по продольной оси;
Trq – постоянная времени демпферной обмотки по поперечной оси;
w – частота вращения ротора (в относительных единицах);
wb – базисная частота (радиан в секунду); kf, kpf – вспомогательные переменные;
Td2s, Tq2s – сверхпереходные постоянные времени по осям;
Q – вспомогательный коэффициент.
Численные значения коэффициентов уравнений определяются по формулам, приведенным ниже.
xad = xd – xs;
xfs = (xds – xs) / (1 – (xds – xs) /xad);
xf = xad + xfs;
md = xad 2 / (xf··xd);
xrds = 1/ (1/ (xd2s – xs) – 1/xfs – 1/xad);
xrd = xad + xrds;
mds = xad 2 / (xrd·xd);
xaq = xq + xs;
xrqs = 1/ (1/ (xq2s – xs) – 1/xaq);
xrq = xaq + xrqs;
mq = xaq 2 / (xrq·xq); g1 = xad / xf;
g2 = xad / xrd;
xrd2s = xrds + 1/ (1/xs + 1/xad + 1/xfs);
Trd = Td2s·xrd / xrd2s;
xrq2s = xrqs +1/ (1/xaq + 1/xs);
Trq2s = Td2s·xrq / xrq2s.
Параметры r, xd, xq, xds, xd2s, xq2s, xs, Tr, Td2s, Tq2s дают-
ся в технических условиях на поставку синхронных генераторов.
Дифференциальные уравнения автоматического регулятора напряжения синхронного генератора, соответствующие структурам и схемам российских систем компаундирования по току и коэффициенту мощности нагрузки, удобнее представлять следующим образом:
ur = ku·Uq + ki·xd·id – iy;
p·iy = (–iy + kk· (U – Un + koc·p·Fr) / Tk; if iy > iym then iy = iym;
if iy < 0 then iy = 0;
if ur > urm then ur = urm,
где U – напряжение статора;
Un – уставка регулятора напряжения;
kk – коэффициент усиления корректора регулятора; ku, ki – коэффициенты усиления регулятора по кана-
лам тока и напряжения регулятора;
kос – коэффициент усиления звена гибкой обратной связи регулятора;
iy – ток управления в регуляторе;
iym – величина ограничения сверху тока управления; urm – величина ограничения сверху напряжения воз-
буждения.
В судостроительной промышленности в течение многих лет используются дифференциальные уравнения асинхронного двигателя в виде
Uq = r·iq +p·Fq /wb + w·Fd; Ud = r·id + p·Fd /wb – w·Fq;
p·Frd = –Frd /Tr + mu·x·id /Tr + s·wc·Frq; p·Frq = –Frq /Tr + mu·x iq /Tr – s·wc·Frd; Fd = x·id + ird;
Fq = x·iq +irq;
Frd = ird + mu·x·id; Frq = irq +mu·x·iq;
Mv = Fd·iq – Fq·id,
где uq, ud – составляющие напряжения статора двигателя по осям d и q;
Fq, Fd – составляющие потокосцепления статора по осям d и q;
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 109 -
Frq, Frd – составляющие потокосцепления ротора по осям d и q;
w – относительная частота вращения поля статора; s – скольжение ротора относительно поля статора; r – активное сопротивление статора;
mu – коэффициент магнитной связи обмоток статора
иротора;
x– индуктивное сопротивление статора при холостом ходе;
Tr – постоянная времени ротора;
wc – угловая частота вращения поля статора; Mv – вращающий момент двигателя.
Индексы d и q относятся к статору, rd и rq – к ротору. Коэффициенты уравнений определяем по формулам
x = xsd;
x2 = xm +x2s;
mu = xm2 / (xsd·x2);
Tr = x2 / (w·r2s).
Здесь xsd – индуктивное сопротивление рассеяния статора; xm – индуктивное сопротивление контура намагничивания магнитопровода двигателя; r2s, x2s – приведенные активное и индуктивное сопротивления ротора.
Заводы изготовители двигателей дают информацию опараметрах двигателей с учетом изменения параметров ротора, вызванных физическим явлением вытеснения тока в процессе пуска. Значения параметров ротора асинхронного двигателя существенно, в полтора– два раза, меняются в процессе пуска. Если считать параметры ротора неизменными, как это принято в Matlab/Simulik, то получимнекорректныерезультаты.
Индексы n в обозначениях параметров ротора означают соответствие режиму, близкому к номинальному, p – к пусковому. По мере разгона двигателя параметры меняются, переходя от величин с индексом р к величинам с индексом n.
Характер изменения сопротивлений ротора в процессе пуска можно принимать линейным. Это вытекает из результатов исследований, проведенных в 70-х годах прошлого века в Московском энергетическом институте.
Для учета явления вытеснения тока формулы для расчета коэффициента магнитной связи mu и постоянной времени ротора Tr следует ввести в уравнения и в соответствующий макромодуль, приняв
x2s = x2sp·s + x2sn·w;
r2s = r2sp·s + r2sn·w,
где w – текущее значение частоты вращения двигателя; s – текущее значение скольжения.
По мере изменения частоты вращения и скольжения в переходном процессе, например при пуске двигателя, должны меняться значения коэффициента магнитной связи и постоянной времени.
При расчетах процессов электроприводе с автономным источником питания целесообразно использовать дифференциальные уравнения синхронного генератора, преобразованные к виду, приведенному в статье. В дифференциальные уравнения асинхронного двигателя следует вводить параметры ротора, меняющиеся в процессе пуска с учетом физического явления вытеснения тока.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 110 -