

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdf8.Петриченко М.Р., Харьков Н.С. Гидравлические потери на основ13. Ананьев Д.В., Абайдуллин Б.Р., Вачагина Е.К. Теплообмен при
ном участке цилиндрического канала при малой интенсивности |
ламинарном течении ньютоновских и неньютоновских жидкос- |
закрутки // Научно-технические ведомости С.-Петерб. гос. политехн. |
тей в кольцевом канале с винтовой закруткой потока // Тепловые |
ун-та. 2008. № 63. С. 237–242. |
процессы в технике. 2012. № 6. С. 267–273. |
9.Казаков А.В., Труфанова Н.М. Численное моделирование жид14. Никитин М.Н. Сравнение характеристик теплоносителей //
|
костного охлаждения малогабаритного электродвигателя // Изв. |
|
Альманах современной науки и образования. 2009. № 6 (25). |
|
Том. политехн. ун-та. 2014. Т. 325. № 4. С. 16–24. |
|
С. 135–137. |
10. |
Tu J., Guan H.Y., Chaoqun L. Computational fluid dynamics. USA, |
15. |
Эффективные интенсификаторы теплоотдачи для ламинар- |
|
Burlington: Betterworth-Heinemann, 2008. 459 p. |
|
ных (турбулентных) потоков в каналах энергоустановок / |
11. |
Бекнев В.С., Епифанов В.М., Леонтьев А.И. Газовая динамика. |
|
А.И. Леонтьев [и др.] // Изв. РАН. Энергетика. 2005. № 1. |
|
Механика жидкости и газа / под общ. ред. А.И. Леонтьева. М.: |
|
С. 75–91. |
|
Изд-во МГТУ им. Н.Э. Баумана, 1997. 671 с. |
16. |
Жуков В.А. Энергосбережение в контурах жидкостного охлаж- |
12. |
Марфина Н.А., Радыгин В.Ю. Применение среды Ansys для |
|
дения энергетических и технологических установок // Вестник |
|
моделирования течения жидкой среды в узких каналах соедине- |
|
машиностроения. 2011. № 6. С. 52–55. |
|
ний с учетом реальной топографии поверхностей // Изв. Моск. |
|
|
|
гос. индустр. ун-та. 2010. № 2 (19). С. 60–67. |
|
|
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 51 -
УДК 62-83
Преимущества нейронных сетей в задачах получения математических моделей системы ГТУ-СГ
Г.А. Килин
Пермский национальный исследовательский политехнический университет, Пермь, Россия
Neural network advantages in problems
of GTU-SG system mathematical model receiving
G.А. Kilin
Perm National Research Polytechnic University,
Perm, Russian Federation
Рассматриваются преимущества построения математических моделей системы ГТУ-СГ на основе нейронных сетей посравнениюсмоделяминаосновеуравненийрегрессии.
GTU-SG system mathematical model building on the basis of neural network in comparison with models on basis of regression equation consider in this article.
Ключевые слова: математическая модель, идентификация, газотурбинная установка, синхронный генератор, нейронные сети, уравнения регрессии.
Keywords: mathematical model, identification, gas turbine unit, synchronies generator, neural network, regression equations.
ВВЕДЕНИЕ
Структура модели системы ГТУ-СГ: уравнение частоты вращения турбокомпрессора
nтк |
= a11GT + a12 nTK + a13nCT + a14 NG |
+ |
(1) |
|
+a15U f + a16U + a17 I; |
|
|
|
|
|
уравнение частоты вращения свободной турбины
nCT |
= a21GT + a22 nTK + a23nCT |
+ |
(2) |
|
+a24 NG + a25U f + a26U + a27 I; |
||||
|
||||
уравнение действующего значения напряжения синхронного генератора
В настоящее время конвертированные авиационные газотурбинные установки (ГТУ) достаточно широко используются для построения на их основе электростанций мощностью до 25 МВт [1]. Получаемая математическая модель взаимодействующих ГТУ и синхронного генератора (СГ) (модель «ГТУ–СГ») предназначена для совершенствования, настройки, тестирования и отладки систем автоматического управления (САУ) ГТУ.
I. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ НА ОСНОВЕ УРАВНЕНИЙ РЕГРЕССИИ
Изначально математическая модель системы ГТУСГ строилась на основе уравнений регрессии [2, 3, 4, 5]. Идентификация производилась на основе метода наименьших квадратов [2, 3, 4, 5]. К сожалению, данный подход имел в своей основе существенный недостаток: структуру уравнений (1)–(2) модели [6] необходимо подбирать вручную, что является крайне неэффективной по времени и затратам процедурой.
U = a G + a n + a n + a N |
G |
+ |
|
||||
31 |
T |
32 TK |
33 CT |
34 |
|
(3) |
|
|
+a35U f + a36U + a37 I; |
|
|
|
|||
|
|
|
|
|
|||
уравнение действующего значения тока синхронного генератора
I = a G + a n + a |
n + a N |
G |
+ |
|
|||
41 |
T |
42 TK |
43 CT |
44 |
|
(4) |
|
|
+a45U f + a46U + a47 I; |
|
|
|
|||
|
|
|
|
|
|||
уравнение вырабатываемой мощности синхронного генератора
N |
= a G + a n + a n + a N |
G |
+ |
|
||||
G |
51 |
T |
52 TK |
53 CT |
54 |
|
(5) |
|
|
|
+a55U f + a56U + a57 I, |
|
|
|
|||
|
|
|
|
|
|
|||
где nтк – скорость вращения турбокомпрессора; ncт – скорость вращения свободной турбины; U – напряжение СГ; I – ток СГ; NG – мощность СГ; Gт – расход топлива; Uf – напряжение обмотки возбуждения.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 52 -

При работе с ГТУ [2, 3, 4, 5] процедура поиска структуры математической модели могла быть решена вручную либо с помощью генетического алгоритма [7], так как количество параметров было невелико. В случае же системы ГТУ-СГ количество параметров возрастает, а в случае использования нелинейных элементов в виде произведения переменных количество возможных комбинаций возрастало многократно. Именно из-за этого недостатка и было принято решение отказаться от данного подхода.
II. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ
Нейронные сети находят широкое применение во многих задачах, таких как распознавание изображений [8, 9, 10], определение эмоциональной реакции человека [11], а также в задачах идентификации ГТУ [12, 13]. Система ГТУ-СГ являются нелинейной системой [14, 15], а как мы знаем из источников [16, 17, 18], нейронные сети способны аппроксимировать любой вид нелинейности, что является одним из существенных преимуществ нейронных сетей.
Также необходимо отметить другую особенность нейронных сетей. В отличие от модели на основе уравнений регрессии при построении модели на основе нейронной сети структуру взаимодействия внутренних параметров ГТУ-СГ задавать не нужно, так как нейронная сеть этот процесс произведет автоматически, в ходе процесса обучения [16, 17, 18]. Тем самым мы автоматизируем процесс получения модели. Проведя эксперименты на реальной установке (или на сложной поэлементной модели первого порядка [19, 20, 21]) и получив необходимые экспериментальные данные, мы подаем их на нейронную сеть и запускаем процесс обучения. В итоге оператор полноценно участвует только в процессе получения экспериментальных данных, сам процесс получе-
ния математической модели системы ГТУ-СГ происходит автоматически под наблюдением оператора.
Еще одной уникальной особенностью нейронных сетей является их обобщающая способность [16, 17, 18]. Это способность заключается в том, что после обучения, подавая на нейронную сеть данные, которые мы не подавали в процессе обучения, мы также на выходе нейронной сети получаем адекватные значения. На рис. 1 показана архитектура нейронной сети для получения модели системы ГТУ-СГ.
Рис. 1. Архитектура нейронной сети: nтк – скорость вращения турбокомпрессора; ncт – скорость вращения свободной турбины; U – напряжение СГ; I – ток СГ; NG – мощность СГ; IF – ток возбуждения; Gт – расход топлива; UF – напряжение обмотки возбуждения; ZN – статическая нагрузка СГ; wabc – весовой коэффициент связи (a – индекс таблицы весов, b – номер нейрона в слое, откуда идет связь, с – номер нейрона в слое куда приходит связь). (Количество
нейронов в обоих скрытых слоях равно 30 (n = m = 30))
Рис. 2. Изменения скорости вращения турбокомпрессора в обучающей выборке (светлая – экспериментальная, темная – модельная)
III. ПОЛУЧЕННЫЕ РЕЗУЛЬТАТЫ
Для получения нейросетевой модели были сформированны обучающие выборки на основе пяти экспериментов. На основе выборки сеть обучалась, и в дальнейшем эти данные поступали в нейронную сеть, и результаты нейроннойсетисравнивалисьсэтойжеобучающейвыборкой.
Обучающая выборка
На рис. 2–4 представленно сравнение данных нейросетевой модели и данных обучающей выборки.
Рис. 3. Изменение скорости вращения свободной турбины в обучающей выборке (светлая – экспериментальная, темная – модельная)
Независимая выборка
После того как нейронная сеть была протестирована на обучающей выборке (на основе которой она обучалась), ее необходимо протестировать на независимой выборке (выборка, значения которой не встречались в обучающей выборке). На рис. 5–7 представлено срав-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 53 -
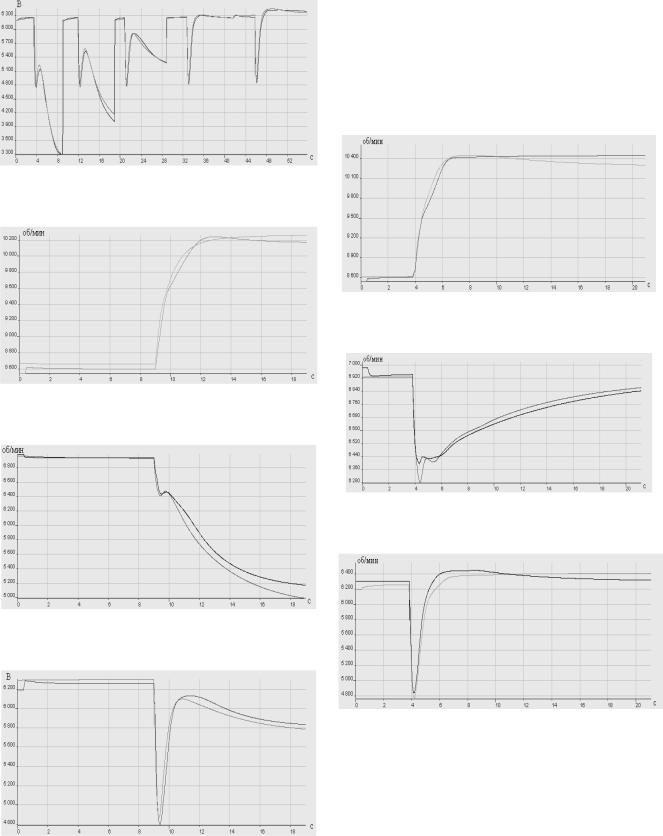
нение данных нейросетевой модели и данных независимой выборки.
Моделирование в замкнутом контуре
Финальным этапом является проверка полученной нейросетевой модели в замкнутом контуре совместно с регулятором. На рис. 8–10 представленно сравнение данных нейросетевой модели и экспериментальных данных.
Рис. 4. Изменение действующего значения напряжения СГ в обучающей выборке (светлая – экспериментальная, темная – модельная)
Рис. 5. Изменение скорости вращения турбокомпрессора в тестовой выборке (светлая – экспериментальная, темная – модельная)
Рис. 6. Изменение скорости вращения свободной турбины в тестовой выборке (светлая – экспериментальная, темная – модельная)
Рис. 7. Изменение действующего значения напряжения СГ в тестовой выборке (светлая – экспериментальная, темная – модельная)
Рис. 8. Изменение скорости вращения турбокомпрессора в замкнутом контуре (светлая – экспериментальная, темная – модельная)
Рис. 9. Изменение скорости вращения свободной турбины в замкнутом контуре (светлая – экспериментальная, темная – модельная)
Рис. 10. Изменение действующего значения напряжения СГ в замкнутом контуре (темная – экспериментальная, светлая – модельная)
ВЫВОД
Из-за широкого распространения нейронных сетей, а также благодаря глубокой проработке и совершенствованию математики нейронных сетей их применение в задачах моделирования сложных систем, а самое главное, внедрение в эксплуатацию является лишь вопросом времени.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 54 -
Библиографический список
1.Автоматизация настройки регуляторов газотурбинных миниэлектростанций при компьютерных испытаниях / А.И. Полулях, И.Г. Лисовин, Б.В. Кавалеров, А.А. Шигапов // Автоматизация в промышленности. 2011. № 6. С. 14–17.
2.Килин Г.А., Кавалеров Б.В., Один К.А. Построение быстрорешаемой модели ГТУ для автоматизированной настройки систем управления // Научные исследования и инновации. 2012.
№ 1–4. С. 157–164.
3.Алгоритм построения быстрорешаемой модели газотурбинной газоперекачивающей установки по экспериментальным данным / Б.В. Кавалеров, К.А. Один, Г.А. Килин, И.В. Бахирев, А.Ю. Повар-
ницын // Вестн. Иж. гос. техн. ун-та. 2013. № 3 (59). С. 116–118.
4.Кавалеров Б.В., Килин Г.А., Один К.А. Всережимная быстрорешаемая модель газотурбинной газоперекачивающей установки // Изв. Юго-Запад. гос. ун-та. Серия: Техника и технология. 2013. № 2.
5.Килин Г.А., Кавалеров Б.В., Один К.А. Выбор математических моделей для газотурбинных установок различных версий применения // Вестник ПНИПУ. Электротехника, информационные технологии, системы управления. 2013. № 8.
6.Килин Г.А. Получение нелинейной математической модели системы «газотурбинная установка – синхронный генератор» с помощью идентификации // Вестник ИжГТУ имени М.Т. Калаш-
никова. 2015. №. 2. С. 87–91.
7.Кавалеров Б.В., Один К.А., Килин Г.А. Структурно-параметри- ческая идентификация модели газотурбинной установки на основе генетического алгоритма // Фундаментальные исследо-
вания. 2014. №. 11–7.
9.Солдатова О.П., Гаршин А.А. Применение сверточной нейронной сети для распознавания рукописных цифр // Компьютерная оп-
тика. 2010. Т. 34. №. 2.
10.Дорогой Я.Ю. Архитектура обобщенных сверточных нейронных сетей // Вісник Національного технічного університету України. 2011. №. 54. С. 229–234.
11.Розалиев В.Л., Бобков А.С., Федоров О.С. Применение нейронных сетей и грануляции при построении автоматизированной системы определения эмоциональной реакции человека // Изв. Волгогр. гос. техн. ун-та. 2010. Т. 11, №. 9.
12.Artificial neural network–based system identification for a singleshaft gas turbine / H. Asgari [et al.] // Journal of Engineering for Gas Turbines and Power. 2013. Vol. 135. No. 9. Р. 092601.
13.Asgari H., Chen X. Q., Sainudiin R. Modelling and simulation of gas turbines // International Journal of Modelling, Identification and Control. 2013. Vol. 20. No. 3. Р. 253–270.
14.Гольберг Ф.Д., Батенин А.В. Математические модели газотурбинных двигателейкакобъектовуправления. М.: Изд-воМАИ, 1999. 82 с.
15.Гуревич О.С. Управление авиационными газотурбинными двигателями: учеб. пособие. М.: Изд-во МАИ, 2001. 100 с.
16.ХайкинС. Нейронныесети: полныйкурс. 2-еизд. М.: Вильямс, 2008.
17.Роберт К. Основные концепции нейронных сетей: пер. с англ. М.: Вильямс. 2001.
18.Методы робастного, нейронечеткого и адаптивного управления / Н.Д. Егупов [и др.]. М.: Изд-во МГТУ им. НЭ Баумана. 2002.
19.Свидетельство о государственной регистрации программы для ЭВМ № 2011611839 РФ. Программный комплекс «Комплекс математических моделей электрогенератора и электросети» «КМЭС» / Петроченков А.Б., Кавалеров Б.В., Шигапов А.А., Один К.А., Полулях А.И., Ситников А.С., Лисовин И.Г., Ширинкина Е.Н. Дата регистрации 28.02.2011.
8.Друки А.А. Применение сверточных нейронных сетей для выде20. Программа КМЭС. Руководство оператора; Перм. гос. техн. ун-т.
ления и распознавания автомобильных номерных знаков на изображениях со сложным фоном // Изв. Том. политехн. ун-та. 2014. 21.
Т. 324, №. 5.
Пермь, 2009. 28 с.
Программа КМЭС. Руководство программиста; Перм. гос. техн.
ун-т. Пермь, 2009. 65 с.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 55 -
УДК 321.313.333
Эффективный промышленный электропривод сегодня
А.Е. Козярук
Национальный минерально-сырьевой университет «Горный», Санкт-Петербург, Россия
Efficient Industry Electric Drive Today
A.E. Kozyaruk
National Mineral Resources University (Mining University),
St.Petersburg, Russian Federation
Рассмотрены проблемы, перспективы и результаты работ по исследованию, проектированию, созданию и эксплуатации эффективного промышленного электропривода в период последнего десятилетия.
Problems, prospects and results of studies, design, development and operation of an efficient industrial the electric drive during the last decade.
Keywords: efficient electric drive, induction motor, active rectifier, control algorithms.
Ключевые слова: эффективный электропривод, асинхронный двигатель, активный выпрямитель, алгоритмы управления.
ВВЕДЕНИЕ
Международные конференции по автоматизированному электроприводу – это возможность освещения исторических аспектов, научно-технических решений по проблемам создания и развития электропривода, новых технических решений с оценкой текущего состояния в теории и практике электропривода и прогнозирования направлений и путей развития.
За последнее десятилетие особо следует отметить V Международную (16-ю Всероссийскую) конференцию, которая проводилась в г. Санкт-Петербурге, 18–21 сентября 2007 г., (АЭП 2007) в год 170-летия появления электропривода, 100-летия регулярного движения трамвая (тяговый электропривод) в г. Санкт-Петербурге, 85-летия первой кафедры электропривода, 80-летию первого выпуска инженеров-электроприводчиков, 60-летию традиции проведения конференций по электроприводу (первоесовещаниевг. Санкт-Петербургев1947 году).
На этой конференции в докладе автор прогнозировал направления и пути развития электропривода на перспективу (2008–2015 гг.) [1]:
♦ развитие теории электроприводов с активными выпрямителями, методов и технических средств обеспечения качества электроэнергии в ЭЭС с использованием такого типа полупроводниковых преобразователей;
♦методы идентификации и структура управления электроприводов без датчиков измерения основных координат;
♦синтез новых (табличных) алгоритмов управления системами электроприводов с полупроводниковыми коммутаторами с использование методов нечеткой логики и сетевых технологий;
♦разработка методов, алгоритмов и технических средств для систем мониторинга, диагностики и оценки остаточного ресурса электрооборудования электроприводов;
♦развитие теории мультиструктурного управления многорежимным электроприводом, структуры и организации таких систем для режимов поддержания момента, скорости и мощности.
В Санкт-Петербургском регионе имеются все предпосылки и техническая готовность для создания в ближайшиегодыэлектроприводовследующегоназначения:
♦гребной электрический привод переменного тока повышенной мощности для новых атомных линейных ледоколов;
♦электротрансмиссии переменного тока для карьерных самосвалов грузоподъемностью 220 и 330 т;
♦комплектного электропривода переменного тока
ссистемой мониторинга и диагностики для карьерных экскаваторов АО «ОМЗ – ИЖОРА – ГОРНАЯ ТЕХНИКА»;
♦электропривод с двигателями переменного тока для прецизионных следящих систем;
♦полупроводниковые коммутаторы с активными выпрямителями и электроприводы на их основе с обеспечением требуемого качества электроэнергии.
Прошло почти 10 лет, и нельзя сказать, что определенные тогда направления и пути развития электропривода хоть в какой-то мере не соответствуют реальному процессу.
Рассмотрим сегодня (в конце 2016 года) состояние и результаты создания эффективного промышленного
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 56 -
электропривода и приведем примеры реализации и успешной эксплуатации.
Под эффективностью будем понимать:
♦высокую эксплуатационную надежность функционирования электропривода в соответствии с назначением, техническими требованиями и технической документацией;
♦обеспечение требуемых в соответствии с техзаданием статических и динамических характеристик электропривода;
♦энергоэффективность и энергосбережение в части минимизации потерь во всех режимах и обеспечение требуемого коэффициента мощности;
♦обеспечение требуемой электромагнитной и электромеханической совместимости в соответствии с нормами и техническими требованиями;
♦удобство облуживания, эксплуатации и ремонта
сиспользованием систем диагностики и оценки остаточного ресурса оборудования.
Вопросы обеспечения эффективности определяются типами электродвигателя, способами и алгоритмами управления и контроля режимами работы и обслуживания электропривода, типами, свойствами и особенностями усилительно-преобразовательных устройств; типом и структурами устройств управления, диагностики и контроля, алгоритмами систем управления и диагностики.
АНАЛИЗ СОСТОЯНИЯ ЭЛЕКТРОПРИВОДА
Начнем рассмотрение вопросов эффективности электропривода с выбора наиболее эффективных типов двигателей.
Весь процесс разработки и внедрения эффективных электроприводов развивался и определялся стремлением к использованию бесконтактного электродвигателя с возможностью обеспечения характеристик, аналогичных хорошо себя зарекомендовавшему в части управления и обеспечения требуемых характеристик двигателя постоянного тока.
Для промышленных механизмов предложены бесконтактные электрические двигатели – асинхронные, синхронные (вентильные) двигатели с возбуждением от высококоэрцитивных постоянных магнитов, вентильноиндукторные (индукционные) двигатели.
Ни в коей мере не уменьшая интерес, пользу и возможную применимость в целях эффективности электропривода любых бесконтактных электрических машин, следует отметить наилучшие эксплуатационные характеристики для электропривода асинхронных короткозамкнутых двигателей при условии создания и использования эффективных усилительно-преобразовательных устройств, средств и алгоритмов управления, обеспечивающих высокую эффективность при относительно низкой стоимости изготовления и эксплуатации.
В последнее время преимущества и лидерство асинхронного частотно-регулируемого привода определяются как совершенствованием и повышением эффективности самих асинхронных двигателей [2], так и созданием и внедрением устройств силовой электроники и интеллектуальных систем управления и контроля,
обеспечивающих требуемые статические, динамические характеристики, энергосбережение и высокие энергетические показатели.
В области создания и совершенствования эффективных асинхронных электродвигателей в мировой
иотечественной практике работы ведутся по созданию
ивнедрению энергоэффективных электродвигателей класса IE3 (в Европе стандарт IEC 60034-30, принятый
в 2008 году). Основные результаты по отечественным разработкам энергоэффективных (ЭЭД) асинхронных двигателей представляются концерном «Русэлпром» (НИПТИЭМ). В российском стандарте– ГОСТ 54413-2011 введен класс энергоэффективности IE4.
НИПТИЭМ разрабатывает энергоэффективные электродвигатели общепромышленного и специального назначения – различныетранспортныесредства, лифтыипр.
Специальные эффективные асинхронные электродвигатели для транспортных установок экскаваторов, буровых станков, технических средств освоения шельфа разработаны и поставляются филиалом «Электросила» АО «Силовые машины» (г. Санкт-Петербург).
Как сказано в [2], «успех частотно-регулируемых электроприводов открывает асинхронному двигателю, образно говоря, второе дыхание».
Рассмотрим кратко (подробности приведены в других докладах, представленных на конференции) реализацию представленных решений десятилетней давности. На сегодняшний день в области создания и внедрения эффективного электропривода:
♦создана и развивается теория и реализуются час- тотно-регулируемые электроприводы с использованием активных выпрямителей и обеспечением энергетических характеристик с высокими значениями коэффициента мощности и удовлетворяющие по требованиям значениям коэффициента нелинейных искажений в питающей сети;
♦разработаны и реализованы структуры управления электроприводом без датчиков измерения основных координат;
♦разработаны и для определенного назначения внедрены новые (табличные) алгоритмы управления систем электроприводов с полупроводниковыми коммутаторами (для асинхронных электроприводов систе-
мы DTC) [3];
♦разработаны методы, алгоритмы и технические средства для систем мониторинга, диагностики и оценки остаточного ресурса электрооборудования электроприводов [4, 5];
♦разработана теория и технические решения для систем мультиструктурного управления электроприводов с обеспечением управления в контурах момента, скорости и мощности [6, 7].
Внедрение с положительным опытом эксплуатации рассмотренных предложений по обеспечению эффективности электропривода сегодня осуществлено в электромеханических комплексах (электроприводах) экскаваторов ЭКГ-32 и ЭКГ-50 ООО ИЗ-КАРТЕКС им. Коробкова [8] и в электротрансмиссии карьерных самосвалов БЕЛАЗ грузоподъемностью 90–450 т [8, 9].
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 57 -
Карьерный электропривод экскаватора включает активный выпрямитель (единый источник питания постоянного тока), который обеспечивает регулирование и поддержание в заданных пределах коэффициента мощности икоэффициента нелинейных искажений (обеспечение электромагнитнойсовместимостиспитающей сетью).
За прошедшее десятилетие эксплуатации карьерных экскаваторов автосамосвалов «БЕЛАЗ» различной грузоподъемности с электротрансмиссией на основе эффективного асинхронного электродвигателя подтверждена эксплуатационная надежность и эффективность такого технического решения.
Зарубежный опыт и достаточно тесные научнотехнические контакты с зарубежными фирмами в части применения и использования электромеханического оборудования (электроприводов) также подтверждает целесообразность максимального использования как эффективного промышленного асинхронного электропривода с алгоритмами векторного и релейно-
импульсного управления (Schneider Electric, Siemens, ABB и др.).
ЗАКЛЮЧЕНИЕ
В заключение необходимо отметить, что процесс создания и развития эффективного электротехнического промышленного оборудования подтверждает правильность ориентации в максимальной степени на частотнорегулируемый асинхронный электропривод. Реализованную для одного из универсальных механизмов – экскаватора, комплексную систему электропривода можно рассматривать как базовую для многих применений – комплексы электропривода буровых станков, технических средств освоения шельфа, транспортных установок большой мощности и грузоподъемности и др.
Достаточно интенсивно развивающиеся в последнее время электроприводы с вентильно-индукторными двигателями по эффективности вряд ли могут изменить тенденцию широкого применения электроприводов с асинхронными короткозамкнутыми двигателями, а их создание и использование целесообразно только для специальных применений и условий [10].
В период между XIII и XI Международными (XX Всероссийской) конференциями по электроприводу АЭП-2016 подготовлены и могут быть рекомендованы учебное пособие и учебник по автоматизированному электроприводу [11, 12].
Состояние автоматизированного электропривода сегодня может характеризоваться как время широкого использования и больших перспектив эффективного электропривода с асинхронными электродвигателями.
Библиографический список
1.Козярук А.Е. Электропривод в Санкт-Петербурге: вчера, сгодня, завтра // Труды V Междунар. конф. по автоматизированному электроприводу. СПб., 2007. С. 12–23.
2.Развитие частотно-регулируемого привода усилило лидерство асинхронных электромоторов [Электронный ресурс]. URL: http: // konstruktor.net/podrobnee-elekt/vtoroe-dyxanie.html
3.Козярук А.Е. Прямое управление моментом в электроприводе переменного тока машин и механизмов горного производства.
СПб., 2008. С. 99.
4.Диагностика и оценка остаточного ресурса электромеханического оборудования машин и механизмов / А.Е. Козярук, Ю.Л. Жуковский, А.А. Коржев [и др.]. СПб., 2013. С. 80.
5.Козярук А.Е., Жуковский Ю.Л. Система обслуживания электромеханического оборудования машин и механизмов по фактическому состоянию // Горное оборудование и электромеханика. 2014. № 10. С. 8–14.
6.Козярук А.Е., Васильев Б.Ю. Методы и средства повышения энергоэффективности машин и технологий с асинхронными электроприводами // Вестн. Южно-Урал. гос. ун-та. Серия: Энергетика. 2015. Т. 15, № 1. С. 47–53.
7.Устройство автоматического управления электроприводом переменного тока при питании от источника ограниченой мощности:
пат. РФ 2417523 / Козярук А.Е., Иванов А.С. от 27.04.2011.
8.Направления повышения эффективности эксплуатации экска- ваторно-автомобильных комплексов на открытых горных работах / А.Е. Козярук, С.И. Таранов, А.В. Самолазов // Горное оборудование и электромеханика. 2014. № 1. С. 6–11.
9.55 лет конструкторской службе БелАЗа: время подводить итоги, повод заглянуть в будущее / А.Н. Егоров, Л.И. Трухнов, Р.В. Лашковский // Горноеоборудованиеиэлектромеханика. 2015. №3. С. 38–42.
10.Интелектуальные электромеханические итемы и кмплекы пециального назначения // Тр. межотраслевого семинара. Новочеркаск, 2014.
11.Электрический привод. Термины и определения / С.К. Козярев, А.С. Анучин, А.Е. Козырев [и др.]. М., 2015. С. 95.
12.Проетировоние электрических устройств / А.Е. Козярук, В.А. Новиков, М.П. Белов [и др.]. СПб., 2015. С. 330.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 58 -
УДК 62-83
Тензорный метод инвариантного описания динамики асинхронного электропривода
Б.С. Курнышев, П.В. Вилков |
Б.А. Староверов |
Ивановский государственный энергетический университет |
Костромской государственный технологический университет, |
имени В.И. Ленина (ИГЭУ), Иваново, Россия |
Кострома, Россия |
Induction motor electric drive’s invariant description based on tensor method
B.S. Kurnyshev, P.V. Vilkov |
B.A. Staroverov |
Ivanovo State Power University n.a. V. I. Lenin (IGEU), Ivanovo, Russian Federation
Разработан метод инвариантного описания динамики электромагнитных и электромеханических процессов в асинхронных электроприводах. Подтверждена эффективность тензорных методов анализа и синтеза устройств идентификации и управления.
Developed a method invariant description of the dynamics of electromagnetic and Electromechanical processes in asynchronous motor drives. Confirmed the effectiveness of tensor methods of analysis and synthesis devices identification and control.
Ключевые слова: асинхронный электропривод, динамика электропривода, идентификация переменных состояния, управление электроприводами.
Keywords: asynchronous electric drive, electric drive dynamics, identification of state variables, control of electrical drives.
I.СОСТОЯНИЕ ВОПРОСА
Втеории электропривода и других электротехнических систем обычно используют координатное описание динамики, однако всякий переходный процесс является объективным физическим процессом, не зависит от выбора системы координат и, следовательно, не требует их обязательного применения. Поэтому в каждом конкретном случае должно существовать инвариантное описание динамики. В данной статье приведены результаты разработки общего подхода к решению данной задачи, а также конкретные результаты применительно к асинхронному электроприводу, которые могут быть использованы в задачах идентификации и управления электроприводами переменного тока.
Воснову положенматематический аппарат тензорного анализа [1], Лагранжев формализм и вариационное исчисление. Основы метода кратко изложены ниже и несколько подробней в [2], практически значимые результаты в областиэлектроприводарассмотреныв[3, 4].
Kostroma State Technological University (KGTU),
Kostroma, Russian Federation
II. РАЗРАБОТКА МЕТОДА
Потокосцепление ψ и ток i , протекающий в про-
воднике, связаны между собой, как известно, функциональной зависимостью
ψ = Li , |
(1) |
где L – индуктивность проводника. |
В электрических |
машинах и других электромеханических преобразователях, содержащих большое суммарное число витков (n) в статорной, роторной электрических обмотках и/или в обмотке якоря машины постоянного тока, связь между
потокосцеплениями ψi и токами ik произвольно взятых
i-го и k-го витков определяется функциональными зависимостями более сложного вида – по сравнению с (1), – в которых в явном виде отсутствуют координаты:
ψi |
1 |
, i |
2 |
, ... , i |
n |
) |
|
(i = 1, 2, ... , n), |
|
|
||
= ψi (i |
|
|
|
|
(2) |
|||||||
ik |
= ik (ψ , ψ |
|
, ... , ψ |
|
) |
|
|
|||||
2 |
n |
(k = 1, 2, ... , n). |
|
|||||||||
|
1 |
|
|
|
|
|
|
|
|
|
||
Здесь и далее используется система «соглашений», понятий и обозначений тензорного анализа [1] (гл. 16). Таким образом, потокосцепления ψi имеют смысл кова-
риантных компонент абсолютного вектора потокосцепления ψ (тензорное поле ψ ), а токи ik нужно рассмат-
ривать как контравариантные компоненты абсолютного вектора i (тензорное поле i ). С точки зрения тензорного анализа векторы ψ и i принадлежат различным вектор-
ным пространствам – в силу их разной физической природы: вектор ψ является характеристикой электромаг-
нитного поля, а вектор i – это характеристика движения электрических зарядов в проводнике. Если, согласно [1],
ввести два локальных базиса ei и ek , то векторы ψ и i
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 59 -

можно представить в виде двух инвариантных форм: ψ = ψiei , i = ik ek (здесь и далее везде используется со-
глашение о суммировании).
Согласно определению полного дифференциала функции нескольких переменных (через ее частные производные), имеем
k = n |
∂ψi |
|
|
|
∂ψi |
|
|
|
|
|
||
dψi = |
|
k |
≡ |
dτ |
k |
= Li k di |
k |
(3) |
||||
|
|
di |
|
|
|
|
. |
|||||
∂i |
k |
|
∂i |
k |
|
|||||||
k = 1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциалы dψi и dik определяют абсолютные векторы dψ и di , соответственно, то есть абсолютные
тензоры ранга 1 «инфинитезимального» перемещения векторов ψ и i .
Из обратного тензорного признака следует, что про-
изводные L |
= |
∂ψi |
в формуле dψ |
|
= L |
dik |
есть ком- |
i k |
|
∂ik |
|
i |
i k |
|
|
поненты абсолютного дважды ковариантного тензора ранга 2 – тензора индуктивности.
Главное отличие рассматриваемого метода от всех известных (по научным публикациям) теорий состоит в том, что (с учетом гистерезиса) принимается неравенство Lki ≠ Li k , то есть тензор индуктивности с компо-
нентами Li k является в общем случае несимметричным.
Следовательно, его можно разложить на симметричную ( Si k ) и антисимметричную ( Ai k ) составляющие. Для
этого удобно перейти к безразмерным формулам.
Для перехода к безразмерным формулам нужно воспользоваться тензорным равенством dψi = lik dψk , эквивалентным (3), но в котором величины lik пред-
ставляют собой безразмерные компоненты метрического тензора. В результате получаем ряд известных по своей структуре равенств
lik = Si k + Ai k , |
lki = Si k − Ai k , |
|
||||
Si k = |
li k + lki |
, |
Ai k = |
li k − lki |
, |
(4) |
|
|
|||||
2 |
|
2 |
|
|
||
Si k = Ski , |
|
Ai k = − Aki . |
|
|
||
Второе важнейшее отличие заключается в определении
компонент Si k |
|
|
|
|
|
и Ai k |
|
согласноследующимформулам: |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
Si k |
= |
|
|
|
ei |
|
|
|
|
|
|
|
|
|
ek |
|
|
|
cos αik , |
|
Ai k |
= |
|
ei |
|
|
|
|
|
ek |
|
|
|
sin αik , |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
Ai k |
|
= |
|
|
ei |
|
|
|
|
|
|
|
ek |
|
|
|
sin αik = − |
|
ek |
|
|
|
|
ei |
|
|
sinαki = − Aki , |
|
(5) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
Si k |
2 + Ai k |
2 = |
|
ei |
|
2 |
|
ek |
|
2 cos2 |
αik |
+ |
|
ei |
|
2 |
|
ek |
|
2 sin2αik |
≡ |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
≡ |
|
ei |
|
|
2 |
|
|
|
ek |
|
2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
где ei , |
ek |
– две системы локальных базисных векторов |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
(локальные базисы по [1]), αik – угол между ei |
и ek , |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
αki – угол между ek и ei , то есть αki = −αik , при этом, очевидно, что A = Aik eiek является тензором ранга 2,
а не ранга 1, поэтому выражения в (5) вида ei 
 ek sin αik
ek sin αik
нельзя рассматривать как векторные произведения, имеющие определенное направление, ортогональ-
ное к ei , ek .
Таким образом, n2 скаляров вида Si k |
2 + Ai k |
2 = |
|
ei |
|
2 |
|
ek |
|
2 |
|
|
|
|
(тензоров ранга 0) являются абсолютными инвариантами
вданномподходе.
Свведением dψk вформулах dψk = Lik dii , dii = lik dik , dψk = Lik lik dik , в которых применена тензорная операция
поднятия и опускания индексов, вектор потокосцепления
( Ψ ) определяется, в |
отличие от (2), компонентами |
ψi = ψi (ψ1 , ψ2 , ... , ψn ) |
и ψk = ψk (ψ1 , ψ2 , ... , ψn ) , где |
(i = 1, 2, ... , n) , (k = 1, 2, ... , n) .
Введение локального базиса позволяет представить дифференциалы dψ , di и dΨ в ковариантной форме:
dψ = ei dψi + ψi dei , |
|
|
||||||||||||||||||
dψ = ek dψk + ψk dek , |
|
|||||||||||||||||||
di = ek dik + ik dek , |
|
|
||||||||||||||||||
di = ei dii + ii dei , |
|
(6) |
||||||||||||||||||
dΨ = ei dΨi + Ψi dei , |
|
|
||||||||||||||||||
dΨ = ek dΨk + Ψk dek |
|
|||||||||||||||||||
ek = δik ei , |
ei = δik ek , |
|
||||||||||||||||||
где δik – символ Кронекера. |
|
|
|
|||||||||||||||||
Квадрат нормы |
|
|
|
|
dΨ |
|
|
|
2 |
вектора |
dΨ определяется |
|||||||||
|
|
|
|
|||||||||||||||||
следующим скалярным произведением: |
|
|||||||||||||||||||
dΨ dΨ = |
|
|
|
dΨ |
|
|
|
2 = dΨk dΨk = lki dΨi dΨk . |
(7) |
|||||||||||
|
|
|
|
|||||||||||||||||
Произведение (7) |
является абсолютным скаляром |
|||||||||||||||||||
(тензором ранга 0). |
|
|
|
|
|
|
|
|
|
dΨi dΨ k |
в (7) представляет |
|||||||||
Внешнее произведение |
||||||||||||||||||||
собой абсолютный дважды контравариантный тензор ранга 2. По необходимости он должен быть несиммет-
ричным, то есть dΨ k dΨi ≠ dΨi dΨ k , в противном случае свертка Ai k dΨi dΨk ≡ 0 превращается в нультензор, что равносильно тождеству lik ≡ Sik , в результа-
те модель становится неполной, в то время как в реальных объектах существует асимметрия при изменении
компонент ψi , ik , в частности, в виде гистерезиса.
Вывод уравнений электромагнитных процессов – в рамках данного метода – в общем виде рассмотрен в [2]. В терминах и с принятыми обозначениями в [2] эти уравнения выводятся следующим образом.
Потребуем, чтобы функция Лагранжа L в данном методе была абсолютным скаляром, то есть инвариантом и величиной безразмерной. Этим двум требованиям удовлетворяет абсолютный скаляр L (тензорное поле ранга 0):
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 60 -