

2836.Труды IX Международной (XX Всероссийской) конференции по автоматизирова
..pdfМинистерство образования и науки Российской Федерации Академия электротехнических наук Российской Федерации Российское отделение IEEE
Национальный исследовательский университет «МЭИ» Пермский национальный исследовательский политехнический университет
Ассоциация инженеров по электроприводу
ТРУДЫ
IX Международной
(XX Всероссийской) конференции по автоматизированному электроприводу
АЭП-2016
Пермь, 3–7 октября 2016 г.
PROCEEDINGS
of the IX International
(XX All-Russian) Conference
on Power Drives Systems (ICPDS’ 2016) Perm, October, 3–7, 2016
Издательство Пермского национального исследовательского
политехнического университета
2016
УДК 62-83 Т65
В сборник включены материалы докладов отечественных и зарубежных ученых и практических специалистов из университетов, научно-исследовательских проектно-конструк- торских организаций и промышленных предприятий, посвященные общим и теоретическим вопросам автоматизированного электропривода, новым техническим и программным решениям в области электропривода и автоматики, актуальным проблемам применения автоматизированного электропривода в промышленности, энергетике, коммунальном хозяйстве.
Представлены тенденции и перспективы развития электроприводов, а также новые образовательные технологии подготовки инженерных и научных кадров по направлению «Электроэнергетика и электротехника».
Почетный председатель конференции: профессор Г.Б. Онищенко
Сопредседатели конференции: профессорН.Д. Рогалев, ректорМЭИ, Россия; профессор А.А. Ташкинов, ректор ПНИПУ, Россия
Координатор конференции: доцент А.Б. Петроченков, ПНИПУ, Россия
Международный программныйкомитет:
Сопредседатели: доцент А.С. Анучин, Россия, профессор Ю.Н. Сергиевский, Россия
Программный комитет: |
проф. В.Я. Беспалов, Россия |
|
проф. И.Я. Браславский, Россия |
|
д-р Ю. Вагапов, Великобритания |
|
проф. И. Галкин, Латвия |
|
проф. И.В. Гуляев, Россия |
|
проф. В.П. Казанцев, Россия |
|
проф. В.Б. Клепиков, Украина |
|
проф. А.Е. Козярук, Россия |
|
проф. А.Р. Колганов, Россия |
|
проф. О.А. Кравченко, Россия |
|
проф. С.И. Лукьянов, Россия |
|
проф. А.А. Радионов, Россия |
|
проф. Д. Ризк, Австралия |
|
проф. Р. Стржелецки, Польша |
|
проф. В.С. Томасов, Россия |
|
проф. А.А. Хашимов, Узбекистан |
|
проф. В.Р. Храмшин, Россия |
|
проф. И. Центнер, Германия |
|
проф. М.Г. Юньков, Россия |
Секретариат конференции: |
Е.В. Бычкова, Россия |
|
доцент Д.К. Елтышев, Россия |
|
И.С. Калинин, Россия |
|
доцент Ю.И. Прудникова, Россия |
|
доцент П.Р. Юзманов, Россия |
|
Л.А. Юркова, Россия |
Конференция проводится при финансовой поддержке Российского фонда фундаментальных исследований и Российского отделения IEEE.
ISBN 978-5-398-01654-3 |
© ПНИПУ, 2016 |
ICPDS'2016 |
International Conference |
|
on Power Drives Systems (ICPDS’2016) |
|
___________________________________ |
|
IX Международная (XX Всероссийская) |
|
конференция по автоматизированному |
|
электроприводу АЭП-2016 |
Секция 1 ОБЩИЕ И ТЕОРЕТИЧЕСКИЕ
ВОПРОСЫ ЭЛЕКТРОПРИВОДА
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 3 -
УДК 621.313-57
Математическая модель электромеханической системы с изменяемой диссипативностью
А.И. Байков |
Б.А. Гордеев |
Нижегородский государственный технический |
Институт проблем машиностроения РАН, |
университет им. Р.Е. Алексеева, |
Нижний Новгород, Россия |
Нижний Новгород, Россия |
|
Electromechanic system mathematic model with dissipation displacement
A.I. Baykov |
B.A. Gordeev |
Nizhny Novgorod State Technical University n.a. R.E. Alexeev, Nizhny Novgorod, Russian Federation
Представлена математическая модель системы из нескольких асинхронных двигателей, которые установлены на упругом основании, опирающемся на демпфирующее устройство гидравлического типа с магнитореологической жидкостью, меняющей вязкость под воздействием магнитного поля. Адекватность модели иллюстрируется примерами анализа изменения баланса мощностей в установившемся режиме со статической нагрузкой и протекания переходного процесса синхронизации вращения валов при различных значениях коэффициента диссипативности.
The article considers the mathematical model of a system of two electric motors. The motors are mounted on hydro mounts with magnetorheological fluid. The viscosity of the magnetorheological fluid changes when applying a magnetic field. The validity of the model is confirmed as the analysis of the balance of power in the steady state with a static load, and analysis of transient process of synchronization shaft at different coefficients of dissipative. The model allows evaluating the electrical energy consumption of electric motor in transient process.
Ключевые слова: математическая модель, электромеханическая система, дисбаланс, вибрация, упругость, диссипативность, асинхронные двигатели, координатные преобразования.
Keywords: mathematical model, electromechanical system, imbalance, vibration, elasticity, dissipative, induction motors, coordinate transformation.
I. АКТУАЛЬНОСТЬ И ПОСТАНОВКА ЗАДАЧИ
Institute of Machine Building of Russian Academy of Sciences,
Nizhny Novgorod, Russian Federation
процессов потребления, передачи и преобразования энергии с целью отработки рациональных алгоритмов управления диссипативностью демпферов с учетом условий эксплуатации электропривода. В электромеханике принято отображать подобные явления на основе обыкновенных дифференциальных уравнений – уравнений состояния, описывающих совместно протекающие процессы в элементах различной физической природы. Ставится задача формирования и проверки адекватности подобной системы на примере анализа процессов в экспериментальной установке [2], у которой асинхронные двигатели оснащены узлами разбалансировки валов и установлены на упругом основании, поддерживаемом демпферами с изменяемой диссипативностью.
II. ОБЪЕКТ МОДЕЛИРОВАНИЯ
Для большей наглядности удобно применить относительные единицы, выражающие переменные и параметры в долях от соответствующих базисных величин. Для экспериментальной установки [2] с асинхронными двигателями 4АА56В2У3 [3] основные базисные величины, через которые по известным физическим соотношениям находятся производные базисные величины, представлены в табл. 1.
III. ОСНОВНЫЕ МАТЕМАТИЧЕСКИЕ СООТНОШЕНИЯ
Одним из перспективных способов управляемого воздействия на вибрации является применение демпферов на основе магнитореологической жидкости [1], вязкость которой меняется под воздействием магнитного поля, создаваемого обмоткой возбуждения. Математическое моделирование требуется для воспроизведения
Динамическое равновесие стола, имеющего коэффициент упругости E и массу М вместе с установленными на нем двигателями и другим оборудованием, опирающегося на демпферы с эквивалентным коэффициентом диссипативности D, в случае одного асинхронного двигателя отображается системой уравнений
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 4 -
|
|
|
|
|
Таблица 1 |
|
|
Основные базисные величины |
|||
Название |
|
|
|
|
|
|
Обозначение |
Значение |
Физическаявеличина |
||
Напряжение, В |
|
|
uB |
310 |
Амплитудафазного |
|
|
напряжениястатора |
|||
|
|
|
|
|
|
Ток, А |
|
|
iB |
0,51 |
Амплитудафазного |
|
|
токастатора |
|||
Частота, Гц |
|
|
|
|
|
|
|
fB |
50 |
Частотапитающейсети |
|
Угловаячастота, |
|
|
ωB |
314,15 |
Угловаячастота |
1/с |
|
|
питающейсети2πfB |
||
|
|
|
|
||
Уголповорота |
|
|
θB |
1 |
Уголповоротавектора |
вектора, рад |
|
|
напряжениясети |
||
|
|
|
|
||
Масса, кг |
|
|
mB |
0,2 |
Массароторадвигателя |
Линейное |
|
|
yB |
0,0025 |
Радиусроторадвигателя |
перемещение, м |
|
|
|||
|
|
|
|
|
|
M dv − m1r1 |
dω1 |
sin θ1 = −Dv − Ey + m1r1ω12 cosθ1 , |
|||
|
|||||
dt |
|
dt |
|
|
|
d y = v, |
|
|||
d t |
(1) |
|||
d ω1 |
= j1−1 (h1 − q1 ), |
|||
|
||||
|
|
|
||
d t |
|
|||
d θ1 |
= ω1 , |
|
||
|
|
|||
d t |
|
|||
где v и ω1 – скорость виброперемещения стола и угловая частота вращения ротора двигателя; m1 и r1 – масса эксцентрика и эксцентреситет, создающие дисбаланс; j1, h1, q1 – момент инерции вращающихся масс, электромагнитный момент и момент сопротивления на валу двигателя. При учете второго и большего числа двигателей добавятся с индексами 1, 2 и т.д. в первое уравнение соответствующие слагаемые и аналогично – пары последних уравнений, описывающих движение роторов двигателей.
Вязкость магнитореологической жидкости в демпфере [1] зависит от многих факторов, главными из которых являются температура и напряженность магнитного поля. Изменения температуры протекают сравнительно медленно и непосредственно не накладываются на колебательные процессы электромеханической системы. Магнитное поле может изменяться в течение миллисекунд и, тем самым, влиять на диссипативность демпфера в фазе с вибрациями стола и периодическими изменениями токов и потокосцеплений двигателя. В первом приближении эквивалентный коэффициент диссипации демпферов в зависимости от степени намагниченности hμ выражается полиномом
Nd |
|
D = dn hμn , |
(2) |
n=0
где в рассматриваемом случае коэффициенты dn имеют значения: 1, 6, 9, 15. В таком случае происходит 30-крат- ное возрастание величины D в диапазоне рабочих нагрузок демпфера.
Электродвигатель получает электрическую энергию из питающей сети, электромагнитное взаимодействие
его статора и ротора представляется [4] с применением координатного преобразования матричным уравнением
d |
|
Udqs1 − αsσ1Ψdqs1 + ωk BΨdqs1 + αsσ1kr1Ψdqr1 |
|
|
(3) |
|||||||||
|
Ψdq |
= α |
|
Ψ |
|
− α |
Ψ |
|
+ (ω − ω |
) BΨ |
|
|
, |
|
dt |
k |
|
|
|
||||||||||
|
|
|
sσ1 r1 |
|
dqs1 |
rσ1 |
|
dqr1 |
k r1 |
|
dqr1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
связывающим преобразованные потокосцепления статора Ψs и ротора Ψr по координатным осям d и q.
Ψdq |
Ψdqs1 |
|
, Ψ dqs1 |
ψds1 |
|
, Ψdqr1 |
ψdr1 |
|
(4) |
|||
= |
Ψdqr1 |
|
= |
ψqs1 |
|
= |
ψqr1 |
. |
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Вектор преобразованных фазных напряжений Udqs1 и токов статора и ротора выражается через непреобразованные величины
U |
dqs1 |
|
= Uc1.max Adqs |
|
|
|
|
||
|
0 |
|
|
|
Is1 = Adqs−1 |
I |
dqs1 |
|
, Ir1 |
|
|
|||
|
|
0 |
|
|
sin (ωc1t ) |
|
|
||
|
− |
|
|
|
sin (ωc1t |
|
) |
, |
|
|
+ |
|
|
(5) |
sin (ωc1t |
|
) |
||
I |
dqr1 |
|
|
|
= Adqr−1 |
|
, |
|
|
|
0 |
|
|
|
с применением матриц координатных преобразований статора и ротора
|
|
|
|
|
|
cos(θk ) |
cos(θk |
|
) |
cos(θk |
|
|
|
|
||
|
|
Adqs = |
2 |
|
− |
+ |
) |
, (6) |
||||||||
|
|
3 |
|
− sin (θk ) |
− sin (θk |
− |
) |
− sin (θk |
+ |
) |
||||||
|
|
|
|
|
1/ |
2 |
1/ |
2 |
|
|
1/ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Adqr1 = |
|
|
|
|
|
|
|
|
|
2 |
|
cos(θk |
− θr1 ) |
cos(θk − θr1 − |
) |
cos(θk |
− θr1 + |
) |
|
|
|||||
|
|
|
|
|||||||||||||
= |
3 |
−sin(θk |
− θr1 ) − sin(θk − θr1 − |
) − sin(θk |
− θr1 + |
) , (7) |
||||||||||
|
|
1/ |
2 |
|
1/ |
2 |
|
|
1/ |
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||||
где частота системы координат ωk совпадает с угловой частотой ωс1 = 2πfc1 трехфазного источника питания.
В (3) используются коэффициенты, определяемые стандартными параметрами схемы замещения двигателя, и вещественная матрица В
αsσ1 |
= |
rs1 |
|
, αrσ1 = |
rr1 |
, |
|
|
|
|
|
|
|
||
lse1 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
lre1 |
|
|
|
|
|
|
|
|
|
lse1 |
= lsσ1 + kr1lrσ1 , lre1 |
= lrσ1 + ks1lsσ1 , |
|
|
|
(8) |
|||||||||
|
|
|
|
l |
−1 |
|
|
l |
−1 |
0 |
−1 |
|
|||
ks1 |
= 1+ |
|
1sσ |
, kr1 |
= 1 |
+ |
1rσ |
, |
B = |
|
|
, |
|||
|
|
|
0 |
||||||||||||
|
|
|
|
l1m |
|
|
l1m |
1 |
|
|
|||||
где rs1, rr1 – активные сопротивления статора и ротора; lsσ1, lrσ1, lm1 – индуктивности рассеяния статора и ротора и индуктивность главного контура намагничивания двигателя.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 5 -

Преобразованные токи статора и ротора, приведенные к одному числу витков, рассчитываются через потокосцепления:
Idq1 = L−sr1Ψdq |
(9) |
с использованием обращенной матрицы индуктивного взаимодействия статора и ротора
|
lsσ 1 + lm1 |
|
0 |
lm1 |
|
0 |
|
|
|
|
||
|
|
0 |
lsσ 1 + lm1 |
0 |
lm1 |
|
|
|
|
|||
Lsr1 |
= |
|
|
|
, (10) |
|||||||
lm1 |
|
0 |
lrσ 1 + lm1 |
|
0 |
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
l |
|
0 |
l |
|
+ l |
|
|
|
|
|
|
m1 |
rσ 1 |
m1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
которая благодаря преобразованию координат не зависит от угла поворота ротора.
Электромагнитный момент, развиваемый двигателем, вычисляется по формуле [4]
h1 = ζ1 (ψdr.1iqr.1 − ψqr.1idr.1 ), |
(11) |
где ζ1 – соотношение полной и электромагнитной мощностей для рассматриваемого асинхронного двигателя.
IV. БАЛАНС МОЩНОСТИ В СТАТИЧЕСКОМ РЕЖИМЕ ПРИ РАЗЛИЧНОЙ ДИССИПАТИВНОСТИ
По уравнениям состояния (1), (3) воспроизведены статические режимы работы одного асинхронного двигателя на постоянную нагрузку при условии искусственной разбалансировки вала ротора. Рассматривалось потребление и расход мощности при различной намагниченности магнитореологической жидкости демпфера с разницей относительных значений коэффициента диссипации от 1 до 30. На рис. 1 приведена расчетная диаграмма запуска двигателя при сильной намагниченности демпфера.
Видно превышение электромагнитного момента двигателя над моментом сопротивления в установившемся режиме, что обусловлено возросшим сопротивлением демпфера из-за повышенной диссипативности.
Рис. 1. Расчетная диаграмма пуска асинхронного двигателя с искусственно разбалансированным ротором и сильно намагниченным демпфером
На рис. 2 для этого процесса в установившемся режиме приведены кривые мгновенных абсолютных значений мощностей: pc – потребляемой от источника питания, pel – потерь в активных сопротивлениях статора и ротора, pmex – отдаваемой механической нагрузки, pD – потерь в демпфере. Они рассчитываются с использованием значений непреобразованных токов статора is1.k и ротора ir1.k по формулам
|
3 |
(ωct − (k −1)2π/ 3), |
|
pc |
= Ec max is1.k sin |
|
|
|
k =1 |
|
|
|
3 |
|
|
pel |
= (rs1is21.k + rr1ir21.k ), |
(12) |
|
|
k =1 |
|
|
pmex = h1ωr1 ,
p = Dv2 .
D
Диаграмма на рис. 2 подтверждает, что при повышенной вязкости магнитореологической жидкости потери в демпфере значительны, фактически, они соизмеримы с электрическими потерями. В случае уменьшения вязкости вследствие снижения уровня намагниченности этой жидкости потери в демпфере становятся существенно меньше электрических потерь. Составляющие активной энергии, рассчитанные для периода напряжения питания источника Tc по значениям потерь
tk |
|
Wi = pi dt , где i = 'c ','el ','mex ',' D ' |
(13) |
tk −Tc
приведены в табл. 2. Моделирование показало, что отмеченное увеличение намагниченности демпфера привело к уменьшению вдвое виброперемещений стола в рассмотренных вариантах.
Рис. 2. Расчетная диаграмма мощностей в установившемся режиме работы асинхронного двигателя с разбалансированным ротором при сильном намагничивании демпфера
Таблица 2
Значения потребляемой активной энергии за период при разной степени намагниченности демпфера
Обозначение |
Значениеэнергии, Дж |
|
присильном |
прислабом |
|
|
намагничивании |
намагничивании |
Wc |
2,705 |
1,983 |
Wel |
1,456 |
1,265 |
WD |
0,590 |
0,067 |
Wmex |
0,647 |
0,677 |
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 6 -

V. ВЛИЯНИЕ ДИССИПАТИВНОСТИ НА ПРОЦЕСС СИНХРОНИЗАЦИИ ВАЛОВ
Существенной особенностью функционирования электромеханической системы, склонной к самосинхронизации [1, 2] является наличие нескольких внешних источников энергии, обусловливающих вращательные и поступательные движения отдельных элементов, а также вибрируемой упругой среды, через которую происходит передача энергии. Результаты воспроизведения этих сложных процессов с помощью предлагаемой модели соответствуют результатам экспериментальных исследований. Так, в ряде случаев запуска двигателей на разные частоты вращения, сопровождающихся захватом на нижней частоте и синхронизацией вращения валов, увеличение диссипативности приводит квозрастанию потребления энергии, ее перераспределению и в итоге ксрыву режима синхронизации и выходу обоих двигателейнасвоисинхронныескорости.
На рис. 3 представлена расчетная диаграмма пуска первого асинхронного двигателя с угловой частотой ис-
Рис. 3. Расчетная диаграмма переходного процесса пуска двух асинхронных двигателей с синхронизацией частот вращения валов и срывом этого режима при увеличении диссипативности демпфера
точника питания ωс1 = 100π с–1 и второго – с частотой ωс2 = 120π с–1. На интервале 0–1,2 с при слабом уровне намагничивания демпфера получен режим синхронизации частот вращения на уровне ωс1. В момент 1,2 с включается сильное намагничивание демпфера на интервалах, совпадающих по фазе с нарастанием скорости виброперемещения и происходит разрушение режима синхронизации с выходом на заданные частоты вращения.
ЗАКЛЮЧЕНИЕ
Представлена действующая математическая модель электромеханической системы, обеспечивающая анализ статических и динамических режимов с учетом потребления и перераспределения электрической энергии при изменении показателя диссипативности демпфера с магнитореологической жидкостью. Предложен способ управления магнитным полем демпфера синфазно с действующем на него возмущением.
Благодарности
Исследование выполнено за счет гранта Российского научного фонда (проект № 15-19-10026).
Библиографический список
1.Применение гидравлических виброопор в синхронизующихся механических системах / Б.А. Гордеев, А.Б. Гордеев, Д.А. Ковригин, А.В. Леонтьева // Приволжский научный журнал. 2009.
№ 3. C. 49–53.
2.Экспериментальные исследования сопутствующих эффектов при синхронизации двух двигателей на упругом основании / Б.А. Гордеев, А.В. Леонтьева, А.Н. Осмехин, С.Н. Охулков, В.В. Бугайский // Вестник машиностроения. 2013. № 6. C. 39–42.
3.Кравчик А.Э. Асинхронные двигатели серии 4А: справочник. М.:
Бурса, 2002.
4.Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург: Изд-во УрО РАН, 2000.
5.Гордеев Б.А., Ковригин Д.А., Леонтьева А.В. Задача синхронизации вращения пары двигателей на упругом основании // Вестник машиностроения. 2011. № 10. C. 3–7.
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 7 -
УДК 621.313-57
Анализ вибраций двигателей, смонтированных на одном основании
А.И. Байков, А.Б. Дарьенков, А.С. Плехов, Д.Ю. Титов |
Б.А. Гордеев, С.Н. Охулков |
Нижегородский государственный технический университет |
Институт проблем машиностроения РАН, |
им. Р.Е. Алексеева, Нижний Новгород, Россия |
Нижний Новгород, Россия |
Analyzing vibration of motors mounted on a single foundation
A.I. Baykov, A.B. Dar’enkov, A.S. Plekhov, D.Yu. Titov |
B.A. Gordeev, S.N. Okhulkov |
Nizhny Novgorod State Technical University
n.a. R.E. Alexeev, Nizhny Novgorod, Russian Federation
Излагается концепция построения математической модели электромеханической системы с электродвигателями, закрепленными на вязкоупругом основании. Проведенные исследования модели выявили наличие взаимодействия процессов колебательного типа при преобразовании электромагнитной и механической энергии, в результате протекания которых возникает эффект синхронизации валов электродвигателей, пускаемых на разные частоты вращения.
The article details the concept of creating a mathematical model of an electromechanical system that contains electric motors mounted on a viscoelastic foundation. The research of the model manifested interaction of vibrational processes in electromagnetic and mechanical energy conversion. Such processes result in shaft synchronization of electric motors operated at different rotational frequencies. The mathematical model allows studying synchronization of motors mounted on a common base. It occurs during the transient processes.
Ключевые слова: вибрация, электромеханическая система, асинхронные двигатели, дисбаланс, спектр.
Keywords: vibration, electromechanical system, induction motors, imbalance, spectrum.
ВВЕДЕНИЕ
В системах со многими источниками вибраций всегда возможна синхронизация на одной или нескольких частотах [1]. Вопросы синхронизации и захвата частоты при испытаниях многочастотных механических систем с локальными источниками шума и вибрации приобретают все большую актуальность в современном машиностроении. Синхронизация и захват частоты при переходных режимах работы могут приводить к вредным последствиям, вплоть до разрушения силовых агрегатов. Захват угловой скорости вращения ротора электродвигателя частотами внешних источников вибрации происходит во время разгона ротора из состояния по-
Institute of Machine Building of Russian Academy of Sciences, Nizhny Novgorod, Russian Federation
коя. Переходный процесс может сопровождаться рядом нежелательных явлений. К примеру, угловая скорость вращения ротора может и не достичь своего номинального значения – явление «застревания». Это свидетельствует о вредном действии вибрационного момента на вал ротора.
Существенной особенностью функционирования электромеханической системы, склонной к самосинхронизации, является наличие нескольких внешних источников энергии, обусловливающих вращательные и поступательные движения отдельных элементов. Перераспределение энергии, обусловленное колебательными процессами, имеет характер взаимодействия электромеханических преобразователей энергии, внешних источников вибраций и элементов активного потребления энергии колебаний с превращением ее в тепло. Такие сложные процессы, наблюдаемые в реальных системах, могут найти объяснение и количественную оценку на основе математического моделирования.
I.МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
Внастоящей статье рассматривается характерная экспериментальная электромеханическая система, состоящая из двух асинхронных двигателей, смонтированных на общем основании, которое установлено на гидроопоры (ГО) (рис. 1). Масса стальной плиты-ос- нования m. Для воспроизведения источников вибраций
на каждом из двигателей жестко закреплены диски с грузиками-эксцентриситетами массой (m1, m2), которые навешиваются с радиусами эксцентриков (r1, r2)
исоздают дисбалансы, являющимися причинами возникновения вибраций. К подобным схемам сводятся многие объекты машиностроения, электротранспорта
иобщепромышленных механизмов. Анализ вибраций
вэтой системе имеет целью выявление условий воз-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 8 -

никновения опасных эффектов синхронизации валов механически связанных двигателей.
Полагается, что асинхронные двигатели имеют по фазам симметричные параметры. Это позволяет при математическом описании электромагнитных процессов взаимодействия статора и ротора использовать координатные преобразования [2]. Преобразованные токи, напряжения и потокосцепления статора вычисляются через непреобразованные фазные величины по формулам
I = Adqs Is , Udqs |
= AdqsUs , Ψdqs |
= AdqsΨs , U dqs = AdqsU s |
(1) |
|||||||||||
dqs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с использованием матрицы поворота статора Adqs |
|
|
|
|
||||||||||
|
|
|
|
cos(θk ) |
cos(θk |
− |
) |
cos(θk + |
) |
|
|
|
||
Adqs |
= |
2 |
|
|
|
(2) |
||||||||
3 |
− sin (θk ) |
− sin (θk |
− |
) |
− sin (θk |
+ |
) |
, |
||||||
|
|
|
1/ |
2 |
1/ |
2 |
|
1/ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где = 2π/3, θk = ωkt, ωk – угловая частота вращения системы координат. Аналогичное преобразование имеет место и для цепи ротора.
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
||
|
|
|
Основные базисные величины |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Название |
|
|
Обозна- |
Величина |
|
Физическая |
|
||||||
|
|
|
|
|
чение |
|
|
|
|
величина |
|
|||
|
Напряжение |
|
|
|
uВ |
310 В |
|
Амплитудафазного |
||||||
|
|
|
|
напряжениястаторадвигателя |
||||||||||
|
Ток |
|
|
|
iB |
0,51 А |
Амплитудафазноготока |
|||||||
|
|
|
|
|
статорадвигателя |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
Частота |
|
|
|
fB |
50 Гц |
Частотапитающейсети |
|||||||
|
Угловаячастота |
|
|
|
ωB |
314,1593 |
|
Угловаячастота |
|
|||||
|
|
|
|
1/с |
|
питающейсети |
|
|||||||
|
|
|
|
|
|
|
|
|||||||
|
Уголповоротавекто- |
|
θB |
1 рад |
Уголповоротавектора |
|||||||||
|
ранапряжениясети |
|
|
напряжениясети |
|
|||||||||
|
|
|
|
|
|
|
|
|||||||
|
Масса |
|
|
|
mB |
0,2 кг |
Массароторадвигателя |
|||||||
|
Линейное |
|
|
|
yB |
0,0025 м |
Радиусроторадвигателя |
|||||||
|
перемещение |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 |
||
|
Дополнительные технические данные базового |
|
||||||||||||
|
|
|
|
|
асинхронного двигателя |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Типдвигателя |
|
lm |
|
rs |
ls |
|
r’r |
l’r |
Mп/Mн |
Mmin/Mн |
|||
|
4АА56В2У3 |
2,4 |
|
0,16 |
0,053 |
|
0,19 |
0,12 |
|
2 |
|
1,5 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Продолжение табл. 3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Mmax/Mн |
|
|
|
sк, % |
|
|
|
Iп/Iн |
|
|
Jд, кг·м2 |
||
|
2,2 |
|
|
51 |
|
|
|
4 |
|
|
0,00047 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для регулирования скорости асинхронных двигателей их статоры запитаны от электронных преобразователей частоты. Применение выходных фильтров снижает уровень высших гармоник в формируемом напряжении до достаточно низкого уровня, что позволяет представлять систему фазных напряжений в виде вектора синусоидальных функций
Рис. 1. Расчетная схема экспериментальной электромеханической системы из двух асинхронных двигателей, закрепленных на упругом основании
В рассматриваемом случае динамических режимов при частотном управлении двигателями оказывается удобным представление взаимодействия электромагнитных контуров машин на основе уравнений состояния преобразованных потокосцеплений статора Ψs и ротора Ψr (модель Ψs – Ψr). Для облегчения идентификации параметров разнородных объектов электромеханической системы применяется математическое описание с использованием относительных единиц. При этом номинальные параметры установленных асинхронных двигателей 4АА56В2У3 (табл. 1) [3] определяют значения основных базисных величин (табл. 2). По ним находятся производные базисные значения остальных величин согласно известным физическим соотношениям. В табл. 3 приведены дополнительные параметры двигателей, необходимые для идентификации математической модели.
Таблица 1
Номинальные технические данные асинхронных двигателей
Типдвигателя |
Мощность, кВт |
КПД, % |
cosφн |
sн, % |
n0, 1/мин |
4АА56В2У3 |
0,25 |
68 |
0,77 |
7,5 |
3000 |
|
|
|
|
|
|
sin (θsi |
+ φai ) |
|
Usi = Usi.max sin (θsi |
+ φbi ) , |
(3) |
sin (θsi |
+ φci ) |
|
где i = 1,2 – индексы номеров двигателей; Usi.max, fsi – амплитуды и частоты основных гармоник трехфазного
напряжений, формируемых по закону частотного управления Us/fs = const; а начальные фазные углы φai, φbi, φci сдвинуты друг относительно друга на 2π/3.
Фазные углы поворота векторов напряжений вычисляются через угловые частоты ωsi
θsi = ωsit = 2πfsit . |
(4) |
Для исследования влияния высших гармонических составляющих в выходных напряжениях преобразователей частоты (5, 7, 11, 13… гармоники) можно представить соотношения (3) как полигармонические функции. Для представления искажений напряжений питания двигателей можно применить модели преобразователей частоты из [4].
Уравнения электромагнитного взаимодействия статоровироторовасинхронныхдвигателейвмоделиΨs – Ψr
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 9 -
|
Ψdqs1 |
|
Udqs1 − αsσ1Ψdqs1 + ωk BΨdqs1 + αsσ1kr1Ψdqr1 |
|
|
|
||||||||||||||||||||||
|
Ψ |
dqr1 |
|
α |
k |
Ψ |
dqs1 |
− α |
rσ1 |
Ψ |
dqr1 |
+ (ω |
− ω |
)BΨ |
dqr1 |
|
|
|
||||||||||
d |
|
|
sσ1 r1 |
|
|
|
|
|
|
|
k |
|
r1 |
|
|
|
|
|
||||||||||
|
|
|
|
= |
|
|
|
|
|
Ψdqs2 + ωk BΨdqs2 + αsσ2kr2Ψdqr2 |
|
|
(5) |
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
dt Ψdqs2 |
|
Udqs2 − αsσ2 |
|
|
|
|||||||||||||||||||||||
|
Ψdqr2 |
|
α |
k |
|
Ψ |
dqs |
2 |
− α |
rσ2 |
Ψ |
dqr2 |
+ (ω |
|
− ω |
|
) BΨ |
dqr |
2 |
|
|
|||||||
|
|
|
|
|
sσ2 r2 |
|
|
|
|
|
|
k |
r2 |
|
|
|
|
|||||||||||
|
m0 |
|
− m1r1 sin φ1 |
− m2 r2 |
sin φ2 |
|
|
|
−m1r1 sin φ1 |
|
j1 |
|
|
|
|
M p12 = |
|
0 |
|
. |
|||
|
−m r sin φ |
2 |
0 |
j |
2 |
|
|
|
2 2 |
|
|
|
|
||
II. МОДЕЛИРОВАНИЕ
где Ψqds, Ψqdr – векторы преобразованных потокосцеплений статоров (под индексом s) и ротора (под индексом r) первого и второго двигателей формируются по составляющим координатных осей d и q
Ψdqs1 |
ψds1 |
|
, Ψdqr1 |
ψdr1 |
|
, |
||
= |
ψqs1 |
|
= |
ψqr1 |
|
|||
|
|
|
|
|
|
|
||
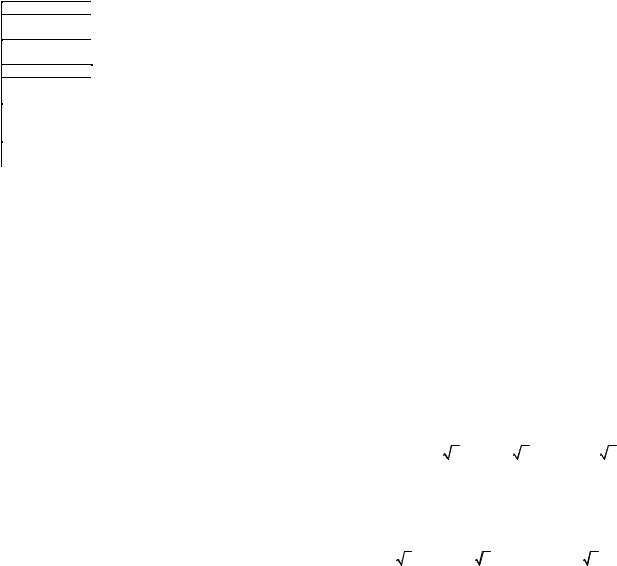
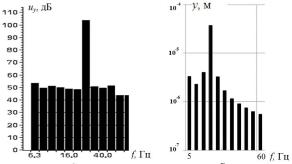
Для проверки адекватности уравнений (5) и (6), представляющих математическую модель рассматриваемой системы, были использованы данные измерения прибором «Октава» спектра гармоник виброперемещений стола в статическом режиме работы одного двигателя с частотой напряжения питания 22 Гц и имеющего дисбаланс, оцениваемый моментом инер-
ции 1,074·10–4 кг·м2 (рис. 2, а).
Ψdqs2 |
ψds2 |
|
, Ψdqr 2 |
ψdr 2 |
|
, |
||
= |
ψqs2 |
|
= |
ψqr 2 |
|
|||
|
|
|
|
|
|
|
||
используются вещественная матрица |
B |
0 |
|
−1 |
и ко- |
||||||||||||||
= |
|
|
|
|
|||||||||||||||
эффициенты |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
α |
isσ |
= |
ris |
, |
α |
irσ |
= |
rir |
, |
l = l |
+ k |
|
l |
, |
|
|
|||
|
|
lise |
|
|
lire |
|
|
ise |
isσ |
|
ir |
|
irσ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
l |
−1 |
|
|
|
|
l |
−1 |
|||
lre = lirσ + kislisσ , |
kis |
= 1+ |
|
isσ |
, kir |
= 1 |
+ |
irσ |
|
, |
|||||||||
|
|
lim |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
lim |
|
|
|
|
|
|
||||
которые вычисляются по параметрам lisσ, lirσ, ris, rir, lim схем замещения асинхронных двигателей [3] и приве-
дены в табл. 3.
Нормализованное матричное уравнение механического взаимодействия асинхронных двигателей, заданной нагрузки и стола согласно [5] имеет вид
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
v |
|
|
|
|
v |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ωr1 |
|
= |
Vp12 |
|
|
|
(6) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
ωr1 |
|
, |
|
||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
||||||||
|
|
|
ωr 2 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
θ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
r1 |
|
|
|
ω |
r 2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θr 2 |
|
|
|
|
|
|
|
|
|
|
|
|||
где k0 = |
ka y B |
, μ0 |
= |
2πμa y B |
|
коэффициенты жесткости |
||||||||||||
|
|
|||||||||||||||||
|
fB |
|
|
|
fB |
|
|
|
|
|
|
|
|
|
|
|
||
и динамической |
вязкости, |
учитывающие упругость |
||||||||||||||||
и диссипативность конструкции |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
a |
|
|
|
0 |
|
|
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
h1 − q1 |
|
|
|
|
|||||
|
Vp12 = M p12 |
0 |
|
|
0 |
|
, |
|||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h2 − q2 |
|
|||||
a = −μ0v − k0 y + m1r1ω2r1 cos θr1 + m2 r2ω2r 2 cosθr 2 ,
аб
Рис. 2. Сопоставление экспериментального (а) и расчетного (б) спектров гармоник виброперемещений стола при одном работающем двигателе с дисбалансом
Расчетный спектр гармоник виброперемещений (рис. 2, б), полученный при установленном уровне чувствительности прибора 0,1 мкм и принятыми значениями коэффициентов k0а = 10–3 Н/м, μ0а = 100 мПа·с в области абсолютных величин согласуется в рабочей области частот с экспериментальным.
Витоговой таблице рассмотренных вариантов режимов (табл. 4) приведены значения полной мощности
иее составляющих, согласующиеся с паспортными данными двигателя.
Вкачестве исходного характерного режима, с которым можно будет сравнивать последующие результаты, воспроизведен переходный процесс выхода на установившиеся частоты вращения роторов обоих двигателей
при разных частотах напряжения питания статоров –
50 и 60 Гц.
На рис. 3, а представлены временные диаграммы частот вращения двигателей ωi, моментов электромаг-
нитных hi = hmi (iqsiidri – idsiiqri) и сопротивления qi, а на рис. 3, б – временные диаграммы непреобразованного
тока i1.1, напряжения u1.1 и мгновенной мощности р1.1 первой фазы статора на периоде напряжения источника питания мало нагруженного первого двигателя с большим отставанием по фазе тока от напряжения.
Опасный режим синхронизации частот вращения валов двигателей, закрепленных на упругом основании, возникает из-за возникновения вибраций, вызванных наличием дисбалансоввращающихся частей механичес-
____________________________________________________________________________________________________________________________
IX Международная (XX Всероссийская) конференция по автоматизированному электроприводу АЭП-2016
- 10 -