

6.3. Порядок проведения работы
При выполнении работы используются модель ведущего моста (лабораторная установка), конструкция заднего моста автомобиля ВАЗ-2101 и плакаты элементов задней трансмиссии.
6.3.1.Изучить назначение и устройство элементов трансмиссии.
6.3.2.Изучить устройство модели ведущего моста и механизма дифференциала, конструкцию заднего моста автомобиля ВАЗ-2101.
6.3.3.Составить кинематическую схему механизма модели согласно ГОСТ 2.770-68 «Обозначения условные графические в схемах. Элементы кинематики». На схеме обозначить все звенья и отчётливо показать характер посадки звеньев на валах.
6.3.4.Подсчитать числа зубьев всех колёс и записать их в отчёт.
6.3.5.Вычислить
передаточные отношения
![]() обращенного
механизма.
обращенного
механизма.
6.3.6.Для
дифференциальной передачи вычислить
передаточные отношения от карданного
вала к левому и правому колёсам
![]() при условии движения автомобиля по
прямому участку дороги и при одинаковом
сопротивлении движению ведущих колёс.
при условии движения автомобиля по
прямому участку дороги и при одинаковом
сопротивлении движению ведущих колёс.
6.3.7.Для
дифференциальной передачи вычислить
передаточные отношения от карданного
вала к одному из колёс, если второе
колесо неподвижно (например, определить
![]() при n1
= 0, т.е. при заторможенном колесе Z1).
при n1
= 0, т.е. при заторможенном колесе Z1).
6.3.8.Полученные расчётом передаточные отношения проверить опытным путём. Для этого, поворачивая на один или несколько оборотов карданный вал, определяют углы поворота и направление вращения колёс или одного колеса при другом заторможенном.
Описание лабораторной установки
Установка состоит из подставки, на которой закрепляется задняя часть рамы автомобиля. Установка используется при выполнении лабораторной работы.
К раме через рессоры крепится корпус заднего моста. Вращение на колёса передаётся от рукоятки, имитирующей карданный вал автомобиля, через угловую муфту, главную передачу, состоящую из конических зубчатых колёс, коробку дифференциала, жёстко прикреплённую к коническому колесу сателлита, центральные зубчатые колёса, жёстко связанные с полуосями. Затормаживание колёс осуществляется рукоятками путём их нажатия. Значения исследований заносим в табл. 6.1.
Таблица 6.1
Значения исследуемого дифференциала
Вывод формулы и определение передаточных отношений |
Экспериментальное значение передаточных отношений |
1. Передаточное отношение ступеней обращенного механизма
если nн=0,
то
|
Застопорим водило, вращаем одно колесо, наблюдаем, как вращается второе колесо, и определяем n1 и n3.
Находим
|
2. Передаточное отношение от карданного вала к левому и правому колёсам при движении автомобиля по прямому участку дороги
Точно так же
n1+n3=2nн, тогда n1=n3=nн
|
Вращаем шестерню Z5, делаем n5 оборотов, находим число оборотов колёс n1 и n3 ‑ левого и правого, при этом следим, чтобы сателлиты не имели вращения вокруг собственной оси. Находим
|
3. Передаточное отношение от кар- данного вала к одному из ведущих колёс при застопоренном другом:
если n1
= 0, то
из формулы n1+n3=2nн получим
n3=2nн,
тогда
|
Застопорим одно
колесо, n1
= 0, делаем n5
оборотов
шестерёнки Z5,
определяем n3
и находим
|
6.4. Содержание отчета
Лабораторная работа №6
1. Название работы.
2. Цель работы.
3. Кинематическая схема модели ведущего моста
4. Число зубьев зубчатых колёс Z1= , Z2= , Z3= ,Z4= , Z5= .
5. Определение передаточных отношений по формулам и опытным путём.
6. Выводы.
Лабораторная работа № 7
Изучение общего устройства систем управления строительных машин
и составление их схем
7.1. Цель работы
Целью работы является изучение систем управления механизмами строительных машин и составление их схем.
7.2. Общие сведения
Системы управления механизмами строительных машин предназначены для периодического включения и выключения с целью изменения, например, положения рабочего органа относительно базовой машины при выполнении технических операций.
Классификация систем управления строительных машин
По назначению системы управления можно разделить на следующие:
система управления двигателем;
система управления муфтами и тормозами;
система рулевого управления;
система управления установкой рабочего органа.
Причём все эти системы могут быть выполнены в двух вариантах:
непосредственного управления;
с усилителем.
Классификация систем управления приведена в табл. 7.1 – 7.4.
Таблица 7.1
Общая классификация систем управления
Классификационный признак |
Классификационная характеристика |
|||
Способ управления |
Ручное управление |
Автоматическое управление |
||
Тип системы управления |
Гидравли-ческая |
Редукторная |
Канатно-блочная |
Комбини-рованная |
Количество исполнительных механизмов |
ОДИН |
НЕСКОЛЬКО |
||
Гидравлическая система управления
Объёмные гидропередачи наиболее широко применяются в системах управления рабочими органами СМ, причём планами перспективного развития указанных машин предусматривается их дальнейшая гидрофикация.
Таблица 7.2
Классификация гидравлических систем управления
Классификационный признак |
Классификационная характеристика |
||
Принцип действия |
Насосная |
Безнасосная |
|
Схема действия |
Ручная |
Автоматическая |
Полуавтоматическая |
Классификационный признак |
Классификационная характеристика |
||
Тип исполнительного механизма |
Гидродвигатель возвратно-поступательного действия (гидроцилиндр) |
Гидродвигатель вращательного действия (гидромотор) |
|
Способ регулирования |
Дроссельное |
Объёмное (машинное) |
|
Наибольшее распространение в СМ получили насосные гидросистемы с ручным управлением для изменения положения рабочего органа (ковша скрепера, отвала бульдозера, автогрейдера) или его частей (заслонки, задней стенки ковша и т.д.) (рис. 7.1). Эти системы, как правило, имеют привод насоса от вала отбора мощности базовой машины, унифицированные с базовой машиной основные узлы гидропередачи (бак, насос, распределитель) и исполнительные механизмы в виде гидроцилиндров (скреперы, бульдозеры) и реже гидромоторов (поворот отвала автогрейдера на 360°) с дроссельным регулированием. Действие этих систем кратковременное, периодическое, а передаваемая мощность определяется необходимыми затратами на перестановку рабочего органа и составляет в зависимости от типа СМ и размеров рабочего органа ‑ 10…50 % мощности двигателя.
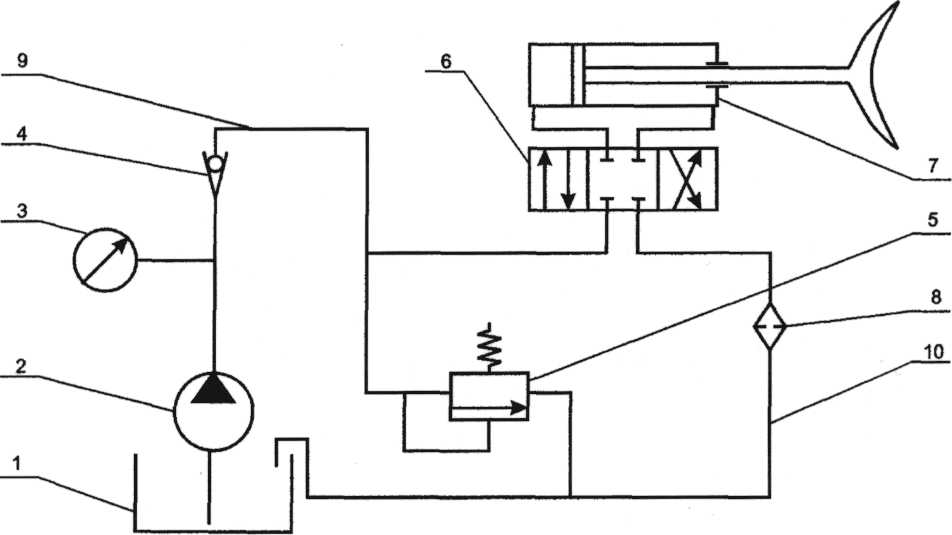
Рис. 7.1. Схема гидравлической системы управления:
1 – бак; 2 – насос; 3 – манометр; 4 – обратный клапан; 5 – клапан предохранительный;
6 – гидрораспределитель; 7 – гидроцилиндр; 8 – фильтр; 9 – напорная магистраль;
10 – сливная магистраль
Редукторная система управления
Редукторные системы управления рабочим органом распространены на автогрейдерах, грейдерах, грейдер-элеваторах и в сочетании с канатно-блочной системой на скреперах.
Таблица 7.3
Классификация редукторных систем управления
Классификационный признак |
Классификационная характеристика |
||
Тип привода |
От основного двигателя |
От индивидуального электромотора |
От ручного штурвала |
Тип редуктора |
Червячный |
Зубчатый |
Комбинированный |
Редукторные системы управления могут иметь привод от основного двигателя машины (рис. 7.2, а) (автогрейдеры, грейдер-элеваторы), от индивидуальных электродвигателей (рис. 7.2, б) (скреперы, грейдер-элеваторы), от ручного штурвала (грейдеры).

Рис. 7.2. Схема редукторных систем управления:
а) с приводом от вала отбора мощности; б) с приводом от отдельных двигателей;
1 – двигатель (ДВС); 2 – муфта; 3 – раздаточная реверсивная коробка;
4 – карданная передача; 5 – исполнительный редуктор; 6 – генератор;
7 – червячный редуктор; 8 – электродвигатель
Наибольшее распространение получили передачи с червячными редукторами в сочетании с другими видами передачи. Это объясняется их малыми габаритными размерами и свойством самоторможения, что позволяет обеспечивать рабочему органу определённое установочное положение без дополнительных фиксирующих устройств.
Канатно-блочная система управления
В настоящее время канатно-блочная система управления применяется довольно редко, преимущественно на скреперах, бульдозерах, экскаваторах и некоторых других машинах для земляных работ северного исполнения. Классификация канатно-блочных систем управления приведена в табл. 7.4.
Таблица 7.4
Классификация канатно-блочных систем управления
Классификационный признак |
Классификационная характеристика |
||
Тип редуцируюшего звена |
Полиспаст |
Дифференциальный барабан |
Зубчатый редуктор |
Расположение лебёдки |
Переднее продольное |
|
Заднее поперечное |
Число барабанов лебёдки |
Одно-барабанная |
|
Многобарабанная |
Система управления лебёдкой |
Ручная |
|
Пневматическая |
Канатно-блочная система управления состоит из лебёдки, регулирующего звена и канатов с блоками (рис. 7.3). Регулирующим звеном может быть полиспаст, дифференциальный барабан или зубчатый редуктор. Наибольшее распространение имеет система с полиспастом, она проста по конструкции и в эксплуатации.
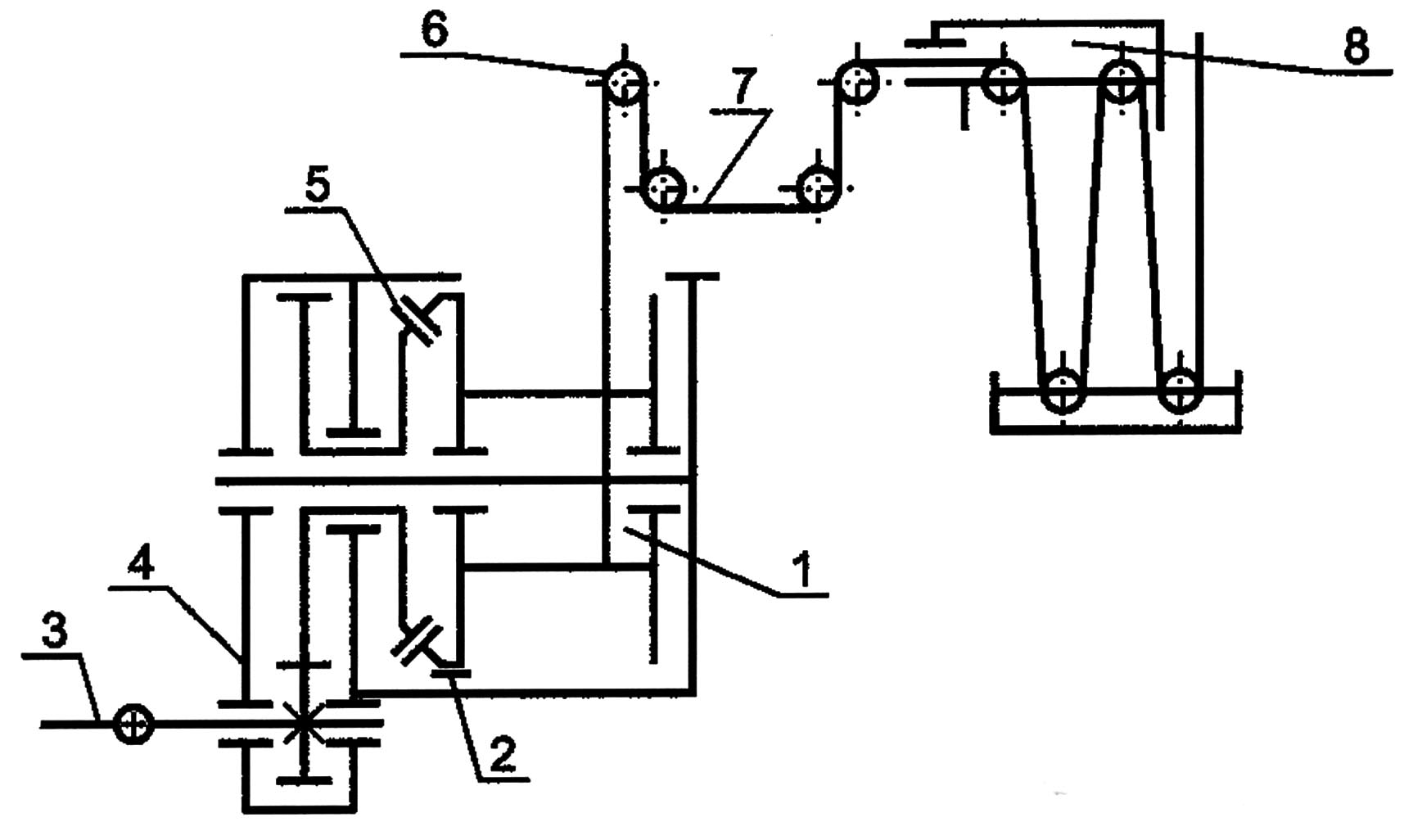
Рис. 7.3. Схема канатно-блочной системы управления:
1 – барабан; 2 – тормоз; 3 – вал отбора мощности; 4 – редуктор;
5 – фрикционная муфта; 6 – блок; 7 – канат; 8 – полиспаст
Применяемые в канатно-блочных системах управления лебёдки имеют заднее поперечное расположение, что позволяет просто осуществить отбор мощности, а также уменьшить число перегибов канатов и направляющих блоков. Для облегчения работы машиниста в лебёдках применяется пневмоуправление фрикционами и тормозами.