

2.2. Матрицы жёсткости конечных элементов
2.2.1. Общие положения
Рассмотрим построение матриц жёсткости КЭ, не касаясь пока вопроса о том, как они используются для решения задач МКЭ. Покажем это на примерах (рисунок 27,а,б,в) стержня общего вида с тремя степенями свободы (связями) на концах, треугольного и прямоугольного КЭ плоской (плоское напряжённое состояние или плоская деформация) системы с двумя степенями свободы в каждой вершине.
а) |
|
||
б) |
|
в) |
|


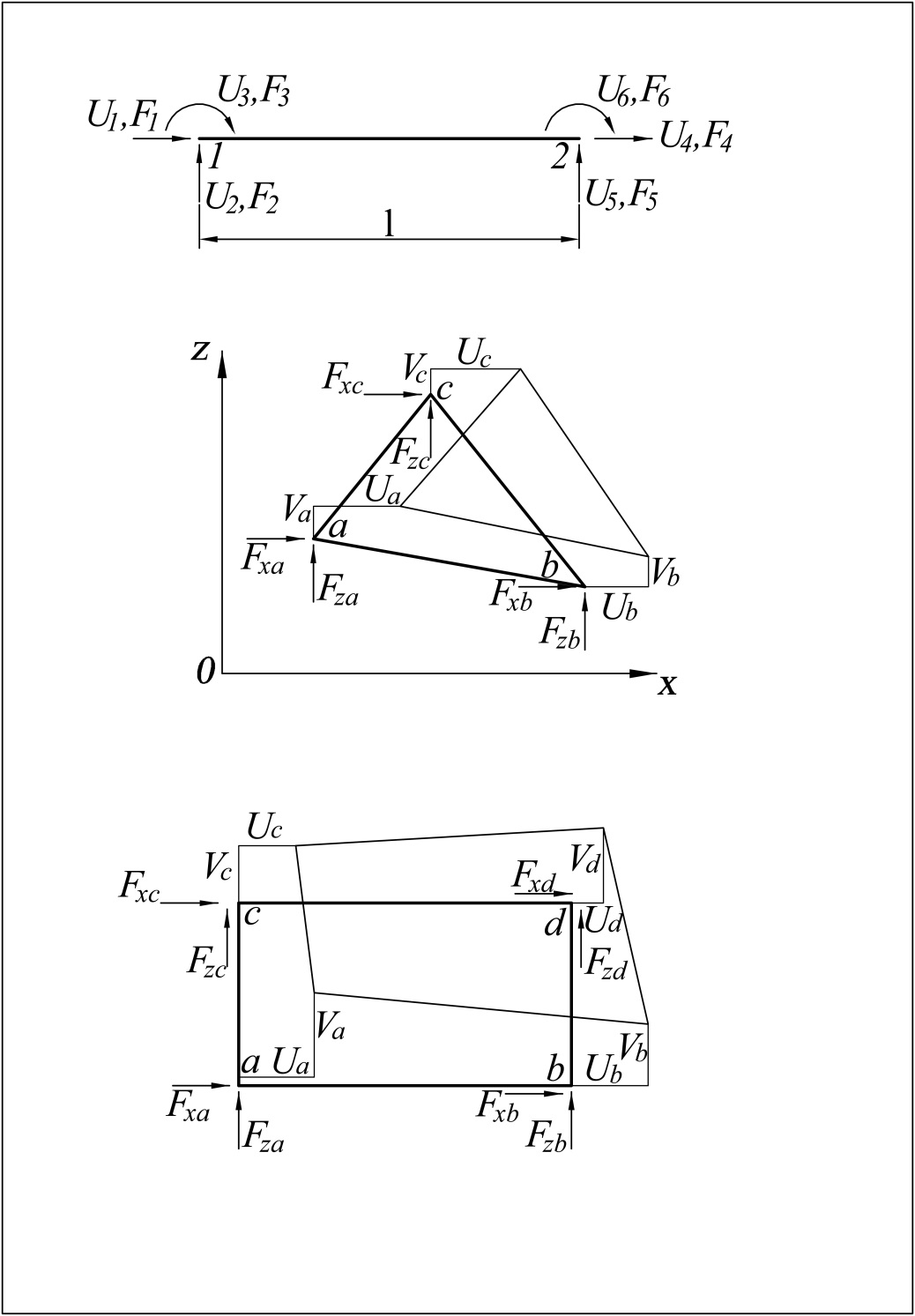
Рис. 27. Плоские конечные элементы (а – стержень общего вида, б – треугольник,
в – прямоугольник), перемещения и узловые силы на их концах и вершинах
Предполагается, что действующие силы приложены только в узлах (1, 2 на рисунке 27,а; a, b, с, d на рисунках 27,б,в) и приведены к направлениям перемещений. Матрица жёсткости КЭ содержит коэффициенты уравнений, связывающих векторы сил и перемещений узлов по направлениям координатных осей.
2.2.2. Матрица жёсткости стержневого кэ
В общем виде связь между перемещениями U1…U6 и узловыми силами F1…F6 (см. рисунок 26,а) с постоянной жёсткостью растяжении-сжатии ЕА и изгибе EI выражается матричным соотношением
{F}=[K]{U}, (2.1)
где
 (2.2)
(2.2)
− векторы-столбцы сил и перемещений,
 (2.3)
(2.3)
− матрица жёсткости КЭ. Каждый коэффициент Kij выражает реакцию (узловую силу) в закреплении по направлению i-й степени свободы (считая это закрепление неподвижным) на единичное перемещение U j=1.
На рисунке 28 показаны возможные перемещения Uj=1 (j=1…6) и вызываемые ими силы Kij в закреплениях на концах стержня. Так, например, при U1=1 (рисунок 28,а) K11=EA/l, K21=0, K31=0, K41=−EA/l, K51=0, K61=0. При U3=1 (рисунок 28,в) K13=0, K23=−6EI/l2, K33=4EI/l, K43=0, K53=6EI/l2, K63=2EI/l.
а) |
б) |
||
|
|
||
в) |
г) |
||
|
|
||
д) |
е) |
||
|
|
||



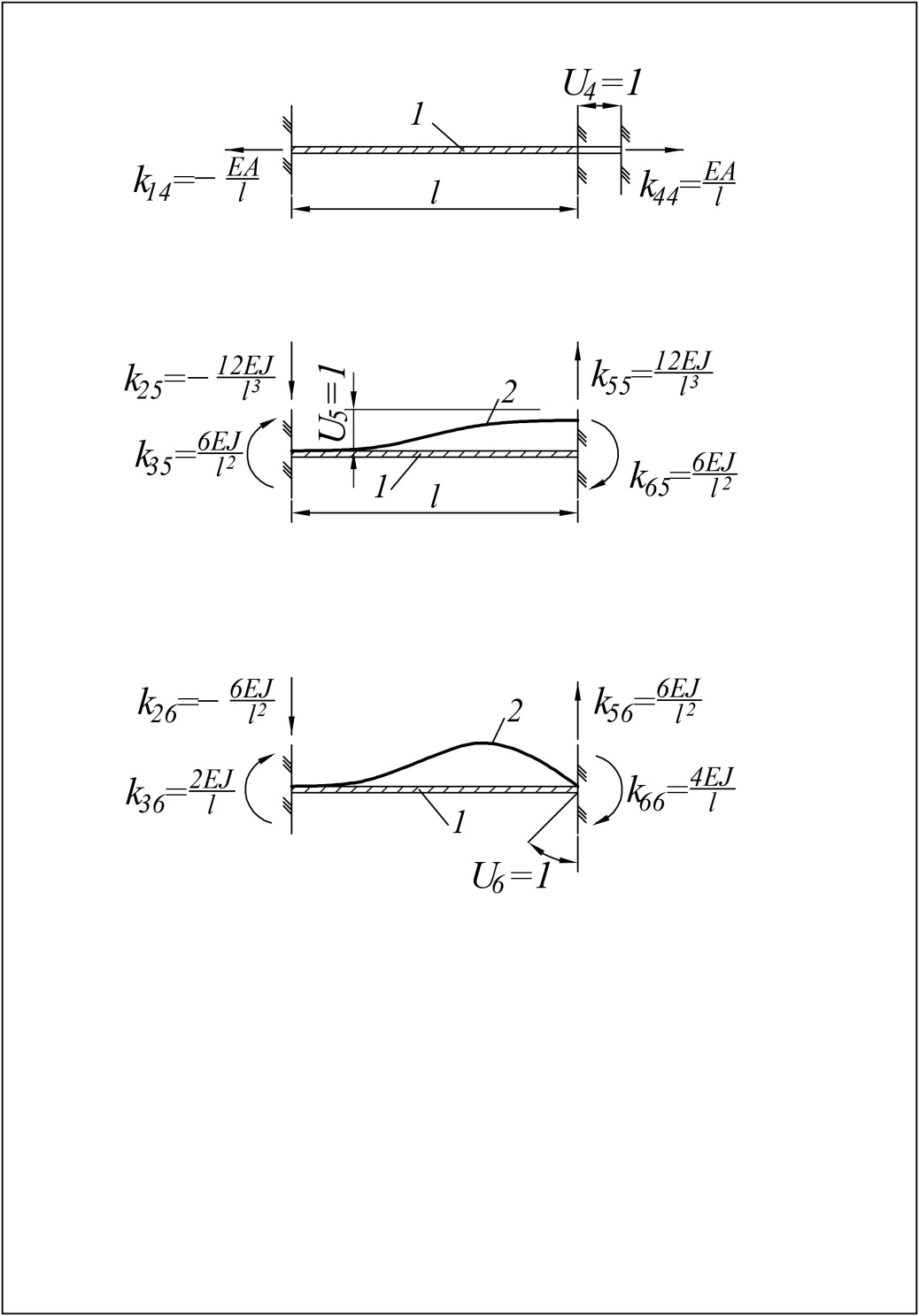

Рис. 28. К построению матрицы жесткости стержня общего вида с шестью закреплениями на концах; а…е – усилия в закреплениях при перемещениях U1… U6; 1 – первоначальное положение стержня; 2 – деформированная ось; 3 – эпюра моментов
Полная запись системы уравнений (2.1), включающей матрицу жёсткости КЭ, имеет вид:
 (2.4)
(2.4)
Аналогичным путём осуществляется построение матриц жёсткости стержневых элементов с другими условиями закрепления концов.
2.2.3. Функции перемещений континуальных конечных элементов
Перейдём к рассмотрению матриц жёсткости плоских континуальных КЭ на рис. 27, б, в, в которых коэффициенты Kij по-прежнему обозначают реакции в закреплениях при единичных перемещениях узлов. Для того, чтобы выразить коэффициенты Kij через геометрические и физические характеристики конечных элементов, вводится допущение о форме уравнений (аппроксимирующих функций) для компонентов перемещений.
Выбор аппроксимирующих функций обусловливают следующие требования, которые станут понятными из последующего изложения:
1) количество коэффициентов в степенных полиномах, описывающих компоненты перемещений, должно быть равно числу степеней свободы (определяемых перемещений узлов) КЭ;
2) неразрывность перемещений не только в узлах, но и на границах КЭ; для этого показатели степеней членов полиномов должны быть на единицу меньше числа узлов, скрепляющих контактирующие КЭ.
Здесь используется математическое правило о том, что через п точек можно провести одну кривую, изображающую полином (п–1) порядка, а через две точки – одну прямую.
Покажем построение функций перемещений на примерах простейших КЭ (трёхузлового треугольника и четырёхузлового прямоугольника) континуальных систем.
Треугольный КЭ. Для треугольного КЭ с шестью степенями свободы (см. рис. 27, б) вид функции перемещений представляет собой следующие записи:
u=α1+α2x+α3z, v=α4+α5x+α6z, (2.5)
где u=u(x,z), v=v(x,z) – перемещения в произвольной точке с координатами x и z; α1…α6 – неизвестные пока коэффициенты, способ определения которых излагается ниже.
Введём обозначения (см. рис. 27, б): Ua, Ub, Uc, Va, Vb, Vc – перемещения узлов треугольного КЭ по направлениям координатных осей X, Z; xa, xb, xc, za, zb, zc – координаты узлов a, b, c. Уравнения (2.5) становятся определёнными, если коэффициенты αk (k=1…6) выражены через перемещения и координаты узлов a, b, c, которые используются в качестве граничных условий.
Поскольку записи (2.5) распространяются на вершины треугольника, можно записать:
 .
(2.6)
.
(2.6)
В матричной форме уравнения (2.6) имеют вид:
 .
(2.6*)
.
(2.6*)
Помещая начало координат в узел а и принимая xа=0, zа=0, находим решение системы уравнения (2.6):
 (2.7)
(2.7)
где S=½[(xa–xb)(za–zc)−(xa–xc)(za–zb)]=½(xbzc−xczb) – площадь треугольника.
В треугольных КЭ сплошность контакта на границах обеспечена в связи с линейным распределением перемещений. Поскольку смежные КЭ скреплены в двух узлах, то и смежные грани, проходящие через эти узлы, после деформирования остаются на одной (общей) прямой.
Прямоугольный КЭ. Для четырёхузлового прямоугольного КЭ с восьмью степенями свободы (см. рис. 27, в) функции перемещений записываются в следующем виде:
u=α1+α2x+α3z+α4xz, v=α5+α6x+α7z+α8xz, (2.8)
где обозначения u=u(x,z), v=v(x,z), x, z, а также αk, сохраняют те же значения, что в уравнениях (2.5).
Повторим изложенный выше способ определения коэффициентов αk для прямоугольного КЭ на рис. 26, в, принимая координатные функции в виде уравнений (2.8).
Отметим, что и в этом случае соблюдается равенство числа неизвестных коэффициентов αk (k=1…8) и степеней свободы узлов. Перемещения на границах распределены линейно, т. е. требование их совместности (непрерывности) выполняется.
Матричная форма уравнений для перемещений узлов имеет следующий вид:
 ,
,
 .(2.8*)
.(2.8*)
Системы уравнений (2.8) так же, как (2.6), разрешимы относительно αk. Для прямоугольного КЭ с началом координат в узле а решение имеет следующий вид:
 (2.9)
(2.9)
где l и m – стороны прямоугольника на рис. 27,в.
* *
*
В табл. 8 представлены формы и функции перемещений наиболее известных плоских и пространственных КЭ, используемых в расчётах конструкций и оснований. Минимальное число узлов (возможные перемещения которых являются степенями свободы) соответствует числу вершин геометрических фигур. Такие КЭ занимают первые пять строк таблицы. Количество неизвестных коэффициентов αk равно удвоенному (в плоских и осесимметричном КЭ) и утроенному (в пространственных КЭ) числу вершин. Функции перемещений являются полиномами первых степеней координат.
Последние две строки занимают примеры КЭ с удвоенным (по сравнению с минимальным) числом узлов. Функции перемещений в таких КЭ построены на основе многочленов второй степени каждой из переменных. Возможно дальнейшее повышение степени многочленов и увеличение числа узлов (степеней свободы) КЭ. Усложнение КЭ (увеличение числа степеней свободы в одном узле) позволяет повысить точность решения, т. е. эквивалентно увеличению частоты членения расчётной области.
Таблица 8
Характеристика некоторых континуальных КЭ
-
Наименование КЭ
Форма КЭ, система координат, векторы степеней свободы в узлах
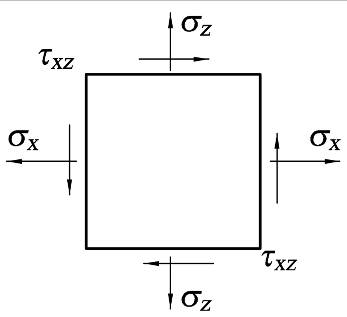
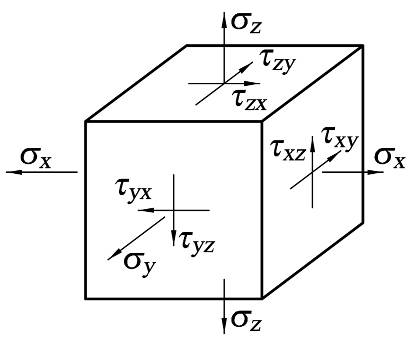
Компоненты напряжений в точках
Функции перемещений
Трехузловой треугольный КЭ плоской системы

u=α1+α2x+α3z
v=α4+α5x+α6z
Ч
61
етырехузловой прямоугольный КЭ плоской системы
u=α1+α2x+α3z+α4xz
v=α5+α6x+α7z+α8xz
Осесимметричный пространственный КЭ треугольного сечения
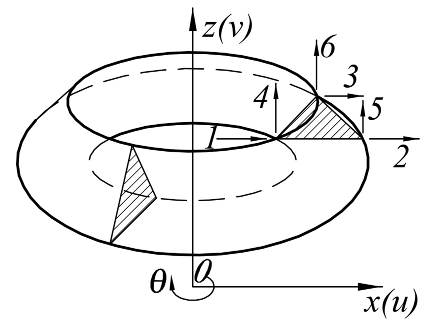
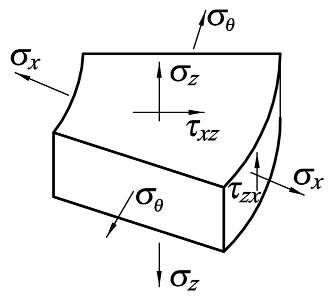
u=α1+α2x+α3z
v=α4+α5x+α6z

Продолжение табл. 8
-
Наименование КЭ
Форма КЭ, система координат, векторы степеней свободы в узлах
Компоненты напряжений в точках
Функции перемещений
Тетраэдр, пространственное напряженное состояния
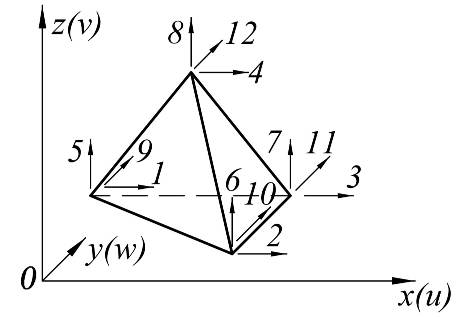
u=α1+α2x+α3y+α4z
v=α5+α6x+α7y+α8z
w=α9+α10x+α11y+α12z
П
62
араллелепипед, пространственное напряженное состояние
u=α1+α2x+α3y+α4z+
+α5xy+α6yz+α7xz+α8xyz
v=α9+α10x+…
w=α17+α18x+…

Окончание табл. 8
-
Наименование КЭ
Форма КЭ, система координат, векторы степеней свободы в узлах
Компоненты напряжений в точках
Функции перемещений
Шестиузловой треугольный КЭ
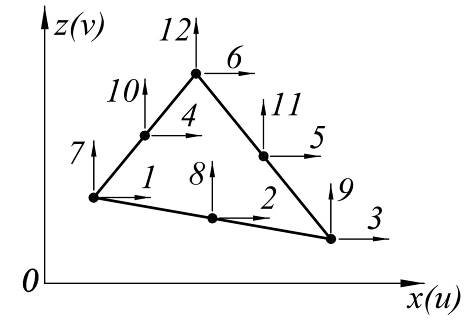

u=α1+α2x+α3z+α4xz+
+α5x2+α6z2
v=α7+α8x+α9z+α10xz+
+α11x2+α12z2
В
63
осьмиузловой прямоугольный КЭ
u=α1+α2x+α3z+α4xz+
+α5x2+α6z2+α7x2z+α8xz2
v=α9+α10x+α11z+α12xz+
+α13x2+α14z2+α15x2z+α16xz2
