

1.5. Центр тяжести твердого тела Центр параллельных сил
Пусть
на тело действует система параллельных
сил
.
Такая система имеет равнодействующую
![]() (если главный вектор отличен от нуля),
линия действия которой проходит всегда
через одну и ту же точку тела
(если главный вектор отличен от нуля),
линия действия которой проходит всегда
через одну и ту же точку тела
![]() ,
независимо от ориентации сил. Эта точка
называется центром
параллельных сил,
ее положение в пространстве определяется
радиус-вектором
,
независимо от ориентации сил. Эта точка
называется центром
параллельных сил,
ее положение в пространстве определяется
радиус-вектором
![]() :
:
 ,
,
где
![]() – радиус-вектор точки приложения силы
– радиус-вектор точки приложения силы
![]() .
.
Координаты
![]() центра параллельных сил определяется
по формулам:
центра параллельных сил определяется
по формулам:
 ,
,
 ,
,
 .
.
Центр тяжести твердого тела – это центр параллельных сил, представляющих силы тяжести материальных частиц, из которых состоит тело. Если тело находится на поверхности Земли и его размеры малы по сравнению с радиусом Земли, можно считать, что линии действия сил тяжести параллельны, а их величины зависят только от объема материальных частиц, плотности материала и ускорения свободного падения.
Формулы для нахождения центра тяжести твердого тела:
 ,
,
 ,
,
 ,
,
 ,
,
где
![]() – объем тела,
– объем тела,
![]() – удельный вес,
– удельный вес,
![]() – вес тела.
– вес тела.
Способы нахождения центра тяжести
Симметричные тела. Если тело имеет плоскость (ось, центр) симметрии, то его центр тяжести находится в этой плоскости (на оси, в центре).
М
Рис. 13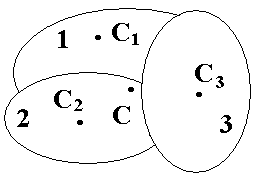
![]() и положение центра тяжести
и положение центра тяжести
![]() (рис. 13). Радиус-вектор центра тяжести
тела
(рис. 13). Радиус-вектор центра тяжести
тела
![]() и его координаты находят по формулам:
и его координаты находят по формулам:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
(28)
,
(28)
Метод отрицательных масс. Пусть надо найти центр тяжести нового тела, составленного из частей 1 и 2 (рис. 13). Его можно получить, вырезав из основного тела часть 3. Решение можно получить либо из (28), либо по формулам:
![]() ,
,
![]() ,
,
![]() ,
,
![]() , (29)
, (29)
где
![]() – вес основного тела.
– вес основного тела.
1.6. Распределенные силы
В статике рассматривают силы, приложенные к твердому телу в какой-либо его точке, и поэтому такие силы называют сосредоточенными. В действительности обычно силы бывают приложены к какой-либо части объема тела или его поверхности, а иногда к некоторой части линии. Так как все аксиомы и теоремы статики формулируются для сосредоточенных сил, приложенных к твердому телу, то необходимо рассмотреть способы перехода от распределенных сил к сосредоточенным в простейших, наиболее часто возникающих случаях.
Р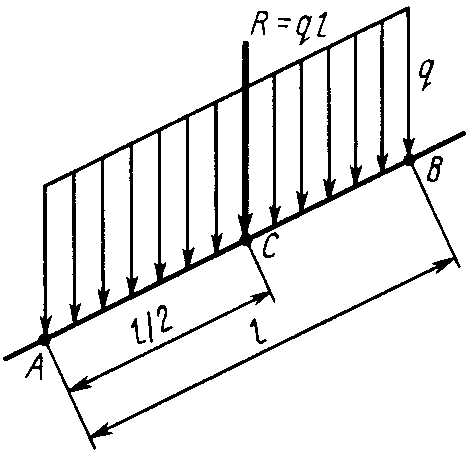 аспределенные
силы прежде всего характеризуются
интенсивностью
распределенной силы, т.е. силой,
приходящейся на единицу объема,
поверхности или длины линии.
аспределенные
силы прежде всего характеризуются
интенсивностью
распределенной силы, т.е. силой,
приходящейся на единицу объема,
поверхности или длины линии.
П
Рис. 14![]() прямой линии длиной
прямой линии длиной
![]() распределены параллельные силы,
интенсивность которых
распределены параллельные силы,
интенсивность которых
![]() постоянна (рис. 14).
постоянна (рис. 14).
Равнодействующая
сила равна
![]() ,
параллельна
распределенным силам и приложена
вследствие симметрии распределения
сил в середине отрезка
.
,
параллельна
распределенным силам и приложена
вследствие симметрии распределения
сил в середине отрезка
.
П
Рис. 15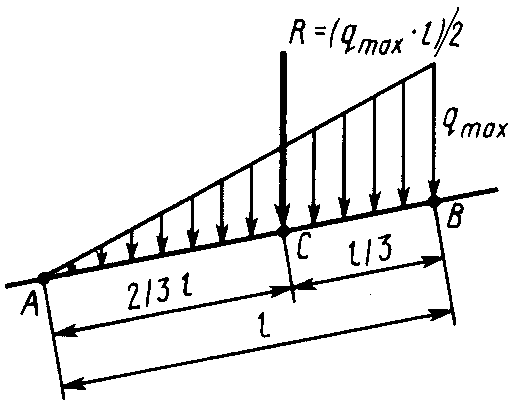
![]() ,
по модулю равной
,
по модулю равной
![]() ,
где
,
где
![]() – наибольшая интенсивность силы. Точка
приложения
равнодействующей силы смещается в
сторону, где интенсивность силы больше,
и совпадает с центром тяжести площади
треугольника, который находится в точке
пересечения медиан, расположенной на
расстоянии
– наибольшая интенсивность силы. Точка
приложения
равнодействующей силы смещается в
сторону, где интенсивность силы больше,
и совпадает с центром тяжести площади
треугольника, который находится в точке
пересечения медиан, расположенной на
расстоянии
![]() от основания треугольника и
от основания треугольника и
![]() от его вершины
от его вершины
![]() ,
т.е.
,
т.е.
![]() .
.