

Учебное пособие 800628
.pdfсовременных компьютеров.
Сравнения алгоритмов 1, 2, 4 проводились с алгоритмом 3, который ищет абсолютный минимум целевой функции (2). Эксперименты проводились с локомотивами в количестве до 30 штук. Ниже представлены результаты анализа работы трех алгоритмов. Для сравнения были оценена погрешность значения целевой функции (2), посчитанного согласно статье [1] для каждого слота (на каждом слоте только один тип локомотивов). На рис.3 желтыми интервалами показаны пределы абсолютных погрешностей алгоритмов.
Рис. 3. (1) — Алгоритм 1; (2) — Алгоритм 2; (3) — Алгоритм 4; (4) — Погрешность значения целевой функции, полученного на основе [1]
Проведены численные эксперименты для получения оценки средней погрешности поиска минимуму целевой функции (2).
Примеры генерировались автоматически случайным образом при помощи программы. Количество локомотивов варьировалось в пределах от 15 до 30 штук, причем локомотивов каждого типа было не меньше одного. Значения веса &$. " лежало в интервале от 1 до 40, а значения продолжительности обслуживания %$, " — от 1 до 100.
Видно, что алгоритм 1 имеет наименьшую погрешность. Для алгоритма 1 дополнительно был проведен сравнительный анализ с оптимизатором IBM IlogCplex [5] с локомотивами в количестве до 50 штук. Результаты сравнения времени работы и относительной погрешности представлены ниже на рис.4 и рис.5.
Рис. 4. Сравнение времен работы алгоритма и оптимизатора
Из рис.4 и рис.5 видно, что погрешность вычисления минимума целевой функции (2) слабо
51

зависит от количества локомотивов, причем значение погрешности оказывается менее 1%. Время работы оптимизатора сильно зависит от количества локомотивов по сравнению с временем работы алгоритма 1.
Результаты и выводы
Построены четыре алгоритма составления расписания обслуживания локомотивов в депо, состоящего из трех слотов, для трех типов локомотивов. Два из представленных алгоритма, основанных на [1], [3], [4], ищут оптимальное или квазиоптимальное расписание за приемлемое время. При помощи численных экспериментов были посчитаны погрешности значений целевой функции (2). Сравнения проводились с методом ограниченного перебора, дающим минимум целевой функции (2). В результате проведения вычислительных экспериментов на данной выборке можно утверждать, что алгоритм 1 дает минимальную погрешность при поиске минимума целевой функции.
При дальнейшем исследовании алгоритма 1 и его сравнении с оптимизатором IBM IlogCplex оценено время их работы и относительная погрешность. Оптимизатор IlogCplex ищет минимум целевой функции (2) точнее, однако время его работы нанесколькопорядковвыше,чем у алгоритма 1 и сопоставимо с временем работы алгоритма 3 (метод ограниченного перебора). Для большого количества локомотивов оптимальнее всего использовать алгоритм 1, так как погрешность его работы невелика, а время его работы мало.
Рис. 5. Погрешность вычисления минимума целевой функции алгоритмом 1 относительно оптимизатора IBM IlogCplex
Библиографический список
1.W.E. Smith. “Various optimizers for single-stage production“, Naval Res. Logist. Quart. 3 (1956) pp. 59–66.
2.J. Labetoulle, E.L. Lawler, J.K. Lenstra, A.H.G. RinnooyKan. “Preemptive scheduling of uniform machines subject to release dates‘, Progress in Combinatorial Optimization, Academic Press, New York, 1984, pp. 245–261.
3.N. Megow, A.S. Schulz. “On-line scheduling to minimize average completion time revisited“, Operations Research Letters, 32 (2004) pp. 485–490.
4.Лазарев А.А., Гафаров Е.Р. “Теория расписаний“, МГУ им. М.В. Ломоносова, 2011. https://www.ibm.com/products/ilog-cplex-optimization-studio
УДК 004.89.699.162.
52

ИЗУЧЕНИЕ ВОЗМОЖНОСТИ КОМПЕНСАЦИИ ВОЗМУЩЕНИЙ, ДЕЙСТВУЮЩИХ НА ПЕЧЬ НАГРЕВА МЕТАЛЛА ПЕРЕД ПРОКАТОМ, С ПОМОЩЬЮ НАСТРОЙКИ ПИ-РЕГУЛЯТОРА
Ю.И. Еременко, А.И. Глущенко, А.В. Фомин Старооскольский технологический институт им А.А. Угарова (филиал) ФГАОУ ВПО
"Национальный исследовательский технологический университет "МИСиС", Старый Оскол
В статье рассматриваются действующие на нагревательную печь возмущающие воздействия. Предложена условная классификация и формат возмущений. Изучено влияние различных коэффициентов регулятора на отработку возмущений нового формата и одновременной подачи возмущений.
EFFECTIVENESS STUDY OF PI-CONTROLLER PARAMETERS ADJUSTMENT TO REJECT DISTURBANCES ACTING ON CONTINUOUS HEATING FURNACE
Y.I. Eremenko, A.I. Glushchenko, A.V. Fomin.
Automated and information control systems department Stary Oskol Technological Institute n.a. A.A. Ugarov (branch) National University of Science and Technology "MISIS" Stary Oskol,
Russia
The article deals with disturbing effects acting on the heating furnace. A conditional classification and a perturbation format are proposed. The effect of various regulator coefficients on the development of disturbance of a new format and simultaneous application of disturbance.
1. Введение, постановка задачи
Современный этап развития автоматизированных систем управления и технических средств автоматизации, выраженный в повышении вычислительной мощности контроллеров и гибкости реализованных в них языков программирования, дает возможность программной реализации более сложных по сравнению с применяемыми в настоящее время алгоритмов управления, в частности оптимальных[1] и адаптивных методов управления. Однако опыт промышленного применения данных алгоритмов не позволяет говорить об их широком распространении, что вызвано подавляющим применением классических ПИД и ПИ алгоритмов и консервативным настроем обслуживающих структур промышленных предприятий, не желающих идти на риск в виде перехода на новые алгоритмы управления, сложность идентификации[2] в условиях производства.
Исследования показывают, что регулятор, оптимально настроенный на переходные процессы, в большинстве случаев неэффективно отрабатывает возникающие в установившемся режиме возмущения [3]. Для поддержания стабильного режима работы необходимы иные коэффициенты, существенно отличающиеся от оптимальных для переходных процессов [4-8].
Задача настройки параметров ПИ-регулятора нагревательной печи для задачи компенсации возмущающих воздействий ранее была рассмотрена в работе[9]. В ней возмущающие воздействия, действующие на печь, были условно разделены на два вида:
1)возмущение типа «А» – подаваемое в канал управления ОУ;
2)возмущение типа «Б» – подаваемое на выходе ОУ.
©Еременко Ю.И., Глущенко А.И., Фомин А.В., 2018
53
Общий вид возмущения любого типа представлял собой ступенчатое воздействие различной амплитуды. Для компенсации таких возмущений был успешно доработан и применен нейросетевой настройщик параметров ПИ-регулятора [9].
Однако, в работе возмущения подавались последовательно, то есть не рассматривалась ситуация одновременного действия возмущения типа «А» и типа «Б». Также возмущения имели ступенчатый вид и не рассматривалось поведение ОУ при снятии действия возмущения.
Вданной работе предлагается:
1)пересмотреть формат возмущающих воздействий, действующих на ОУ с учетом более глубокого анализа теплотехнологических особенностей печи нагрева;
2)провести моделирование с одновременной подачей возмущающих вида «А» и «Б»;
3)изучить влияние коэффициентов П и И каналов регулятора на качество компенсации возмущений нового формата учитывая ситуацию снятия (прекращения) действия
возмущающего воздействия.
2. Моделирование
Для проведения моделирования первоочередной целью являлось получение модели одной из зон нагревательной печи АО «ОЭМК». Была выбрана зона №2, как наиболее подверженная действию возмущений, так как именно в неё производится загрузка холодного металла.
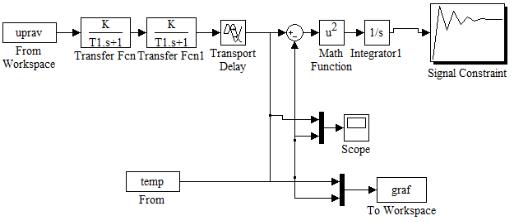
Ввиду непрерывности производства идентификация с использованием тестового сигнала невозможна, так как она может нарушить действующий технологический режим. Учитывая данный факт, идентификация была проведена с использованием статистических данных работы печи. Для получения математической модели использовался метод наименьших квадратов [10], для реализации которого были использованы блоки системы Matlab (рис.1):
блок uprav, содержащий значения управляющего воздействия с печи
структурная модель объекта управления, в виде двух апериодических звеньев I порядка
звена запаздывания
математические функции возведения в квадрат и интегратор
блок data, содержащий значения температуры с реальной печи отжига.
Врезультате получена следующая структурная схема идентификации показанная на
рис.1.
Рис.1 Структурная схема идентификации модели зоны печи
В результате идентификации получена модель, где два звена апериодического порядка для удобства пересчитаны в аналогичное им звено II порядка и звено запаздывания – выражение (1).
54
W(s) |
33.8 |
|
*e 10s |
(1) |
||
1800s2 |
60s 1 |
|||||
|
|
|
||||
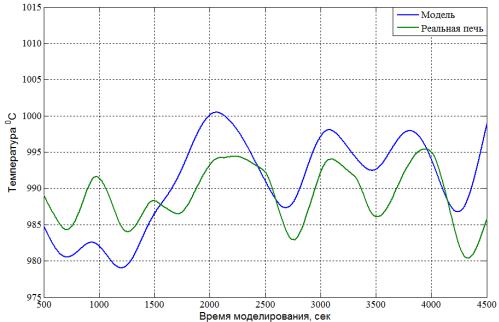
В процессе идентификации получены следующие графики (рис.2). Идентифицировать более точную модель на нелинейном, динамическом, подверженному постоянному действию различных возмущений объекте, достаточно сложно. При этом, целью идентификации является получение модели для анализа влияния различных каналов регулятора на возмущающие воздействия, благодаря чему качество идентификации для решения данной задачи можно считать достаточным.
Рис.2. Результаты идентификации зона №2 печи нагрева.
При классификации действующих возмущений предлагается не отказываться от условного деления на тип «А» и тип «Б», а лишь пересмотреть их формат/вид:
1) Возмущение типа «А»: для нагревательной печи основным физическим аналогом является посад холодного металла. Посаженный холодный металл начинает поглощать тепло в печи, снижая температуру в зоне. Данное возмущение предлагается рассматривать как снижение коэффициента усиления ОУ, при этом, с течением времени, металл относительно прогреется, что уменьшит эффект от возмущения. На рис.3(а). показан предлагаемый общий вид изменения значения К(см. (1)) ОУ.
2)Возмущение типа «Б»: для нагревательной печи основным физическим аналогом является открытие шторы печи для загрузки металла. Открытие шторы приводит к выходу тепла из зоны печи, что приводит к снижению температуры в зоне. Рабочий такт загрузки длиться около 2 минут и включает в себяоткрытие шторы, работу толкательного механизма, шага печи, закрытие шторы. Данное возмущение имеет синусоидальный вид, но без отрицательной области. Амплитуда и длительность возмущения взяты из анализа реальных графиков печи. Данное возмущение предлагается рассматривать как синусоидальное возмущение по температуре после
ОУ.
Для изучения влияния настройки параметров различных каналов регулятора на компенсацию возмущений, представленных в новом виде, была разработана структурная схема моделирования, показанная на рис.4.
55
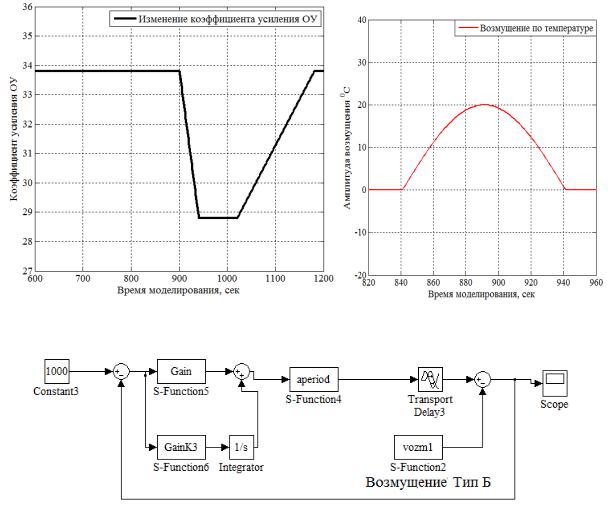
Рис.3. Общий вид изменения коэффициента усиления ОУ при возмущении типа «А» «посад металла в зону» (слева) и общий вид возмущения типа «Б»(справа)
Рис.4. Общий вид схемы моделирования
Объект управления (рис. 4) реализован в виде S-функции «aperiod». Необходимость в такой реализации, вызвана неспособностью классического блока «transfer_function» менять свои параметры в процессе работы. Коэффициенты ПИ-регулятора так же реализованы в виде S-функций «Gain» и «GainK3» для возможности изменять коэффициенты в процессе моделирования. В S-функции «vozm1» реализован блок возмущений, выходом функции является синусоидальное возмущение, подаваемое после ОУ, а также данная S-функция изменяет коэффициент усиления ОУ в функции «aperiod» соответственно рис.3. Первоначальная настройка регулятора проводилась эмпирически для выхода на уставку без колебаний.
Далее эксперимент проводился в три этапа:
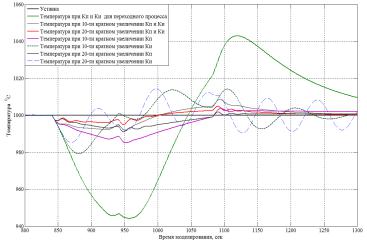
1) на первом этапе отрабатывалось возмущение типа «Б» с помощью настройки только Кп, только Ки и совместной настройки обоих коэффициентов. Результат показан на рис. 6. Результат аналогичен предыдущим исследованиям[9] – несмотря на изменение характера возмущения со ступенчатого на синусоидальный, для успешной компенсации необходимо увеличивать Кп. Настройка Ки нецелесообразна, так как приводит систему в колебательный режим.
56
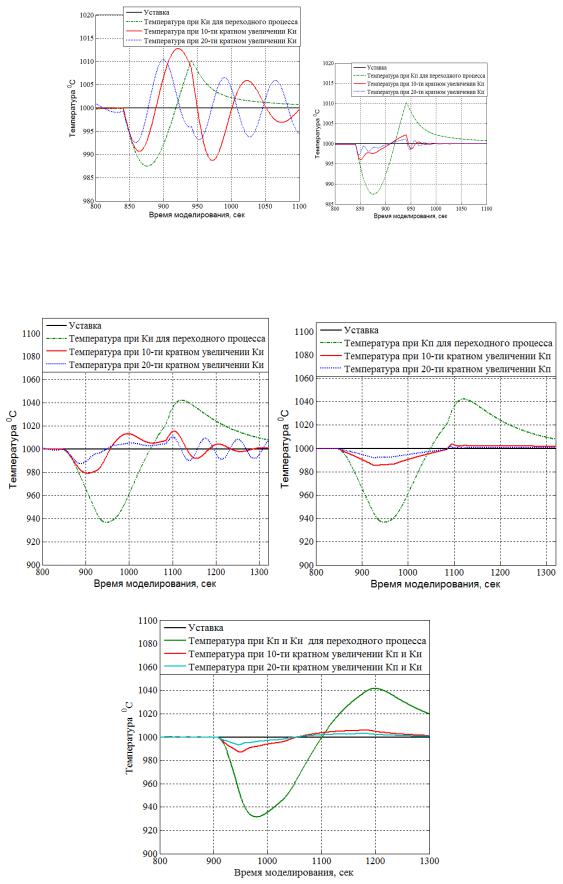
Рис.5. Компенсация возмущения настройкой Ки (слева) и Кп(справа)
2) На втором этапе отрабатывалось возмущение типа «А» с помощью настройки только Кп, только Ки и одновременно двух параметров. Результат показан на рис. 7.
Рис.6. Компенсация возмущения настройкой Ки (слева) и Кп(справа)
Рис.7. Компенсация возмущения одновременной настройкой обоих каналов
57
Результат аналогичен предыдущим исследованиям – несмотря на изменение характера возмущения со ступенчатого в канал управления на снижение коэффициента усиления ОУ, для успешной компенсации необходимо увеличивать оба канала регулятора. Настройка Кп позволяет снизить максимальную ошибку, настройка Ки позволяет компенсировать статическую ошибку.
3) На третьем этапе компенсировалась одновременная подача обоих возмущений с помощью настройки только Кп, только Ки и одновременной настройкой обоих параметров. Результат показан на рис. 9.
Рис. 8. Результаты компенсации одновременной подачи обоих возмущений
Как видно из графика, наилучший результат достигается при одновременной настройке обоих каналов. Кп позволяет эффективно компенсировать возмущение типа «Б» и положительно сказывается на компенсации типа «А». Настройка Ки позволяет компенсировать возмущение типа «Б» и незначительно влияет на компенсацию типа «А».
3. Обсуждение результатов исследования
Результат исследования представляет собой нахождение зависимости качества компенсации возмущения от настройки параметров ПИ-регулятора:
1)Проведена идентификация модели одной из зон печи нагрева на установившемся режиме. В рамках прошлых работ[9] использовалась модель, полученная на переходных процессах.
2)Предложен новый вид действующих на нагревательную печь физических возмущений: в отличии от прошлых работ [9] возмущение типа «Б» предлагается рассматривать как синусоидальное, а возмущение типа «А» как снижение К ОУ. Данное решение более точно описывает влияние реальных возмущений на нагревательную печь. Так же рассмотрена ситуация одновременной подачи обоих типов возмущающих воздействий.
3)Сравнительное моделирование позволило получить рекомендации по настройке регулятора под каждый тип возмущения- в отличии от классической рекомендации [1] по увеличению только П-составляющей регулятора для возмущений всех видов, для возмущения типа «А» и одновременной подаче обоих видов возмущений производить одновременную настройку как П так и И-
составляющей регулятора.
Стоит отдельно отметить, что в данном исследовании изменение коэффициентов проводилось достаточно условно с помощью их 10-ти и 20-ти кратного изменения с целью определения качественного, а не количественного эффекта их изменения. При этом, как видно из части графиков, необходимости в 20-ти кратком изменении нет, слишком большие значения коэффициентов регулятора приводят к возникновению колебательного режима.
58
Поэтому дальнейшей целью для более точной настройки на режим компенсации возмущений является адаптация полученных результатов для интеграции их в базу правил нейросетевого настройщика[9], что позволит учесть нелинейности объекта управления и решить задачу количественного изменения параметров регулятора.
Выводы:
1)проведена идентификация модели зоны №2 нагревательной печи;
2)предложен новый формат возмущений, действующих на зону печи с более качественным учетом её теплотехнологических особенностей;
3)проведено исследование влияния двух коэффициентов регулятора на компенсацию каждого из возмущений: для компенсации возмущения типа «Б» необходимо изменение только Кп, для компенсации возмущения типа «А» – одновременное изменение обоих параметров;
4)проведено исследование влияния двух коэффициентов регулятора при одновременной подаче обоих возмущений. Для эффективной компенсации действующих возмущений также необходима одновременная настройка обоих каналов регулятора.
Исследование проведено при финансовой поддержке прикладных научных исследований Министерством образования и науки Российской Федерации, договор №14.575.21.0133 (RFMEFI57517X0133).
Библиографический список
1.Краснова С. А., Мысик Н. С. Каскадный синтез наблюдателя состояния с нелинейными корректирующими воздействиями //Автоматика и телемеханика. – 2014. – №. 2. – С. 106-128.
2.Салыга В. И., Карабутов Н. Н. Идентификация и управление процессами в чёрной металлургии //М.: Металлургия. – 1986.
3.Åström K. J. et al. Automatic tuning and adaptation for PID controllers-a survey //Control Engineering Practice. – 1993. – Т. 1. – №. 4. – С. 699-714.
4.Александров А. Г., Хомутов Д. А. Повышение точности систем с пид-регуляторами при внешнем возмущении //Проблемы управления. – 2010. – №. 1. – С. 64-70.
5.Воронов К. В., Никифоров В. О. Динамический регулятор выходной переменной с компенсацией постоянных возмущений //Автоматика и телемеханика. – 2003. – №. 2.
– С. 11-21.
6.Лубенцова Е. В., Володин А. А., Лубенцов В. Ф. Нейро-нечеткая система управления температурным режимом ферментационного процесса //Инфокоммуникационные технологии. – 2014. – Т. 12. – №. 3. – С. 55-62.
7.Vilanova R., Visioli A. PID Control in the Third Millennium. Lessons Learned and New Approaches. – London: Springer, 2012. – 595 p.
8.Vrančić D., Strmčnik S., Kocijan J. Improving disturbance rejection of PI controllers by means of the magnitude optimum method //ISA transactions. – 2004. – Т. 43. – №. 1. – С. 73-84.
9.Еременко Ю. И., Глущенко А. И., Фомин А. В. Применение нейросетевого настройщика параметров ПИ-регулятора нагревательной печи для отработки возмущающих воздействий различных типов //Системы управления и информационные технологии. – 2016. – Т. 64. – №. 2. – С. 86-91.
10.Миронов В. И., Миронов Ю. В. Метод наименьших квадратов в задачах идентификации параметров моделей нелинейных динамических систем //Труды СПИИРАН. – 2009. – №. 9. – С. 148-158.
59

УДК 614
РАЗРАБОТКА МОДЕЛИ РАДИАЦИОННОЙ ДЕСТРУКЦИИ ЭЛАСТОМЕРОВ
А.В. Карманов Воронежский государственный технический университет
Исследованы технологические свойства вулканизатов бутилкаучука, после воздействия γ-излучения в зависимости от поглощенной дозы. Получено математическое описание процесса радиационной деструкции эластомеров и предложен метод оценки необходимой дозы облучения, которая обеспечивает требуемые технологические свойства эластомеров.
MODEL OF RADIATION DESTRUCTION OF ELASTOMERS
A.V. Karmanov
Voronezh State Technical University
The technological properties of butyl rubbers obtained by irradiation on a γ-rays at various absorbed doses are studied. A mathematical description of the radiation destruction of elastomers is obtained. A method for estimating the necessary radiation dose ensuring the required technological properties of elastomers is proposed.
При воздействии излучений энергии на эластомеры протекают процессы, приводящие к изменению их химического состава и свойств. При этом могут иметь место сшивание за счет образования химических связей между макромолекулами или деструкция, обусловленная разрывом связей в главных цепях, приводящим к образованию макромолекул меньшей длины [1]. Бутилкаучук относится преимущественно к деструктирующимся эластомерам. При деструкции разрыв связей в главной цепи может произойти в любом месте макромолекулы. Радиационно-химический выход деструкции прямо пропорционален дозе облучения и молекулярному весу продуктов деструкции. Разработка математической модели радиационной деструкции эластомеров позволит подобрать условия облучения для получения эластомерных материалов с заданными технологическими свойствами [2].
Для построения математической модели радиационной деструкции использовали результаты исследования технологических свойств вулканизатов бутилкаучука после воздействия на них γ-излучения на источнике Co60 дозами 20-100 кГр. Образцы отличались составом, а именно, типом вулканизующей группы и наполнителей: смоляной вулканизат шифра BR-D и серные вулканизаты шифров BR-PI и BR-PII. Технологические свойства полученных регенератов оценивали по показателю вязкости, который определяли на вискозиметре Муни при температуре 100 оС.
Для построения математической модели радиационной деструкции использовали подход, описанный авторами [3]. При этом деструкцию представляли реакциями:
P k1 R1 R2
P R P0 (1)
где P – текущая массовая концентрация полимера; R1 и R2 – концентрация полимерных радикалов, Р0 – начальная массовая концентрация полимера.
Процесс образования радикалов описывается уравнением:
© Карманов А.В., 2018
60