

Учебное пособие 800628
.pdfпоказывают, что интерактивность интерфейса и внедрение в него элементов компьютерной игры не оказывают значительного влияния на вовлеченность студентов в процесс обучения [4]. Поэтому при разработке виртуальной лаборатории разумно ориентироваться на компромиссное решение, которое одновременно предлагает современный и удобный интерфейс и не перегружено мультимедийными элементами.
Перед нами стояла цель внедрения научных результатов и алгоритмов в учебнообразовательный процесс в виде цикла лабораторных работ, которые можно выполнять удаленно, в режиме онлайн. Требовалось заранее подготовить площадку ко всем проводимым и потенциально возможным численным экспериментам. В качестве объектов лабораторных работ были выбраны электромеханические системы, в частности, двигатель постоянного тока.
Наиболее естественным видом управления для двигателя постоянного тока является разрывное управление. Скользящий режим подразумевает бесконечную частоту переключений, однако при численном моделировании добиться бесконечной частоты невозможно, что приводит к необходимости выработки других подходов к построению численной модели двигателя электротехнических систем, в нашем случае двигателя постоянного тока.
В нашей работе на основе блочного подхода разработана процедура перехода от обратной связи, назначенной для непрерывного времени, к дискретному времени. Таким образом обрабатывается ситуация, когда управление можно назначать только в определенные моменты времени, и оно остается постоянным на всем временном промежутке. Данная процедура была применена при разработке методического комплекса удаленной лаборатории, который будет описан в Разделе 3.
2. Построение дискретной модели
Одним из важных элементов системы удаленного обучения является блок численного моделирования исследуемых технических объектов. Заложенная у пользователя возможность выбрать задачу управления, вид обратной связи и соответствующие коэффициенты позволяет не только продемонстрировать эффективность описываемых методов, но и, после анализа выходных данных моделирования, дать оценку качеству усвоения материала и, опционально, допустить пользователя до выполнения лабораторных работ с реальными объектами.
В данной работе в качестве рассматриваемого электротехнического объекта был выбран двигатель постоянного тока. Данный тип устройств, с одной стороны, иллюстрирует основные особенности электрических исполнительных устройств (разделяемость переменных состояния по темпам движений, релейный характер истинного управления), а, с другой стороны, отличается относительной простотой синтеза обратной связи.
Рассмотрим подход к построению разностной схемы, аппроксимирующей замкнутую в непрерывном времени систему. Общий вид системы дифференциальных уравнений, описывающих объект управления, можно записать как
& |
n |
,u R |
m |
. |
(1) |
x f (x,u), x R |
|
|
Пусть для системы (1) уже выбран закон обратной связи
u (x) |
(2) |
Тогда уравнения замкнутой системы (1)-(2) можно переписать в виде
x& f (x, (x)) F(x). (3)
Как упоминалось ранее, рассматриваемые электротехнические объекты обладают той особенностью, что управляющее воздействие чаще всего имеет разрывной характер, и изменяться может только в определенные моменты времени. Разумеется, причины у этой
251

особенности могут быть различной природы, от времени переходных процессов в ключевых системах (т.н. рассасывании транзистора) до частоты работы аналого-цифровых преобразователей. Тем не менее, в наиболее общем случае достаточно будет следующего ограничения. Пусть для системы (1) и выбранной обратной связи (2) существует такая
постоянная времени T , в течение которой для реального объекта изменение величины входного сигнала невозможно. Т.е. если в момент времени t0 контроллер установил входной
сигнал на уровне u U (t0 ) , то справедливо и выражение u(t) U (t0 ) t [t0 ,t0 T ) . Первым и самым очевидным подходом к моделированию такой ситуации является т.н.
явная разностная схема Эйлера первого порядка или, проще говоря, допредельная запись производной по времени для состояния объекта x. Система (3) тогда запишется в виде
x(t T) x(t) f (x(t), (x(t))),t {t0,t0 T,t0 2T,...,t0 nT,...}, n N.
T
Погрешность такой аппроксимации пропорциональна шагу по времени в первой степени. Одной из очевидных слабых сторон такого подхода является накопление ошибки моделирования на больших промежутках времени, которая, тем не менее, в задачах теории управления часто незаметна, т.к. рассматриваемые замкнутые системы, как правило, устойчивы и сходятся к началу координат.
Одним из подходов к повышению точности численного моделирования может быть формирование функции H (T, x) , которая будет определять входной дискретный сигнал,
приближающий расчетные значения к непрерывному xs (t) со степенью аппроксимации
выше первой. Например, если существует возможность выписать аналитически решение замкнутой системы (3), то в качестве дискретного управления может быть выбрано усредненное значение входного сигнала:
|
1 T |
||
u = |
|
h( s (x))ds & H (T, x) . |
|
T |
|||
|
0 |
||
Тем не менее, точное решение для замкнутой системы удается получить довольно редко, что ставит задачу построения приближенных методов. В работе [5] предложен метод
построения функции H (T, x) на основе рядов Тейлора по переменной T . В данной работе
был предложен несколько более простой подход, который, тем не менее, позволяет обеспечить любой требуемый порядок аппроксимации для системы (1)-(3).
Запишем ряд Тейлора для вектора состояния системы:
x(t |
T) x(t |
) Tf (x(t |
),u(t )) |
T2 |
f&(x(t |
|
),u(t )) |
T3 |
&f&(x(t ),u(t )) O(T4) |
(4) |
|
|
0 |
|
|||||||||
0 |
0 |
0 |
0 |
2 |
|
0 |
6 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Второго порядка аппроксимации, как 640 килобайт, должно быть достаточно для любой задачи, так что остановимся на нем. Подставим функцию (2) в (4), обозначая нулевым индексом начальные значения соответствующих величин:
|
|
|
T 2 |
|
f |
|
f |
|
|
|
|||
x(t0 |
T) x(t0 ) Tf (x0 |
,u0) |
|
|
du |
|
|
dx |
|
||||
|
|
x |
|
|
|
|
|
|
(5) |
||||
2 |
|
|
|
||||||||||
|
|
|
|
|
u dx |
|
t t0 |
dt |
|
||||
|
|
|
|
|
|
|
|
|
|||||
Представим новое управление, которое будет действовать в течение всего промежутка
времени T в виде U (x0 ) u0 . Тогда запишем выражение для вектора состояния: |
|
|||
x(t0 |
|
,u0) |
f |
|
T) x(t0) T f (x0 |
|
(6) |
||
|
|
|
u |
|
|
252 |
|
|
|
Приравняв правые части уравнений (5) и (6), получим
|
T |
|
f |
|
f |
du dx |
f |
|
|
|
||
|
|
x |
|
|
|
|
|
|
|
. |
||
|
|
|
|
|
|
|
||||||
|
2 |
|
|
u dx dt |
u |
|
t t0 |
|
||||
|
|
|
|
|
|
|||||||
Такая аддитивная добавка к схеме Эйлера позволяет аппроксимировать модель с точностью, определяемой порядком разложения функции в уравнениях (5),(6).
3. Структура онлайн-платформы
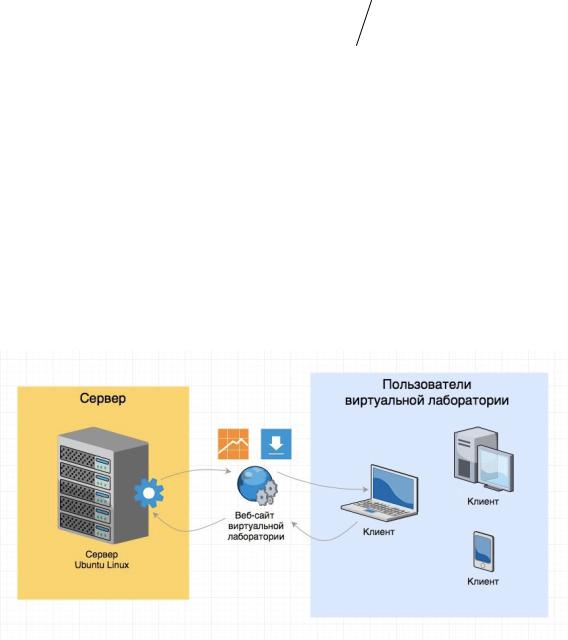
Внедрение приведенных результатов предлагается в виде цикла лабораторных работ, выполнение которых происходит удаленно в онлайн-режиме. Для серверной части платформы используется компьютер под управлением Ubuntu Linux, на котором выполняются все вычисления. На клиентской стороне пользователями выступают студенты, аспиранты и все заинтересованные лица. Они могут пользоваться платформой с любых устройств: компьютеров, ноутбуков, мобильных телефонов.
В качестве посредника между клиентом и сервером используется написанный нами веб-сайт, который перенаправляет параметры, заданные пользователем, на сервер. Сервер производит расчеты и выдает текстовые результаты, после чего сайт отображает пользователю полученные результаты и предлагает скачать их в виде текстового файла.
Рис. 1. Архитектура платформы
Пользователь может выбрать один из заранее предложенных видов законов управления, таких как ПИД-регулятор (или, как частный случай, ПИ-регулятор), разрывное управление на скользящих режимах или вихревой алгоритм, а также задать параметры обратной связи. В случае ПИ-регулятора, к примеру, в качестве задаваемых параметров указываются пропорциональный и интегральный коэффициенты, а в случае использования вихревого алгоритма можно задавать такие параметры, как амплитуды разрывов и угловые коэффициенты линейных областей.
Сайт передает коэффициенты на сервер, где программа на языке C производит расчеты и выдает сайту обратно значения (в случае ПИ-регулятора – значения угловой скорости и силы тока). Результат работы алгоритма отображается в виде графика, а результаты вычислений можно скачать в текстовом виде для дальнейшего анализа.
253
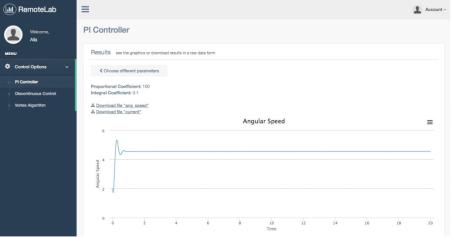
Рис. 2. Интерфейс сайта. Результаты работы алгоритма
Заключение
В данной работе была рассмотрена задача построения и разработки виртуального стенда двигателя постоянного тока. Основным результатом является созданная онлайнплатформа, которая может быть в дальнейшем использована в курсах «Теория управления», «Управление электродвигателем» как для удаленных лабораторных работ, так и для допуска к реальным.
Особенностью данной работы является процедура построения дискретной модели, которая учитывает особенности объекта в двигателях постоянного тока.
В дальнейшем результаты работы могут быть масштабируемы и воспроизведены, поскольку еще одной особенностью подхода является учет не конкретного объекта, а электротехнической системы в целом.
Библиографический список
1.Brahimi, T., Sarirete, A. Learning outside the classroom through MOOCs // Computers in Human Behavior. Volume 51, October 2015, Pages 604-609.
2.Carnevali, G., Butazzo, G. A virtual laboratory environment for real-time experiments // IFAC Intelligent Components and Instruments for Control Applications, Aveiro, Portugal, 2003.
3.Dormido, S., Vargas, H., Sánchez, J., Dormido, R., Duro N., Dormido-Canto, S., Morilla, F. Developing and Implementing Virtual and Remote Labs for Control Education: The UNED pilot experience // Proceedings of the 17th World Congress The International Federation of Automatic Control, Seoul, Korea, July 6-11, 2008.
4.Dyrberg, N.R., Treusch, A.H., Wiegand, C. Virtual laboratories in science education: students’ motivation and experiences in two tertiary biology courses // Journal of Biological Education. Volume 51, Issue 4, 2 October 2017, Pages 358-374.
5.Khryashchev, S. On accuracy of control of dynamical systems with various types of piecewise constant feedbacks // 2018 14th International Conference "Stability and Oscillations of Nonlinear Control Systems" (Pyatnitskiy's Conference) (STAB), Moscow, 2018, Pages 1-4
254
СОДЕРЖАНИЕ
УПРАВЛЕНИЕ ТЕХНИЧЕСКИМИ СИСТЕМАМИ И ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Агранович Ю. Я.
К ОПРЕДЕЛЕНИЮ ПРОПУСКНОЙ СПОСОБНОСТИ ПО ШЕННОНУ…………………. 3
Анпилов А. О., Ерёменко Ю. И.
ИНТЕНСИФИКАЦИЯ ПРОЦЕССА ВАКУУМНОЙ ФИЛЬТРАЦИИ ЖЕЛЕЗОРУДНОГО КОНЦЕНТРАТА НА ОСНОВЕ СИСТЕМЫ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ……………………………………………………………………. 8
Гаракоев А. М., Мойланен Е. В.
УПРАВЛЕНИЕ ПРОЦЕССОМ АЭРОГЕОФИЗИЧЕСКОЙ СЪЕМКИ С ПОМОЩЬЮ СИСТЕМЫ ЭКВАТОР…………………………………………………………………….…….13
Глущенко А. И., Петров В. А., Ласточкин К. А
АДАПТИВНОЕ НЕЙРОСЕТЕВОЕ УПРАВЛЕНИЕ БАЛАНСИРУЮЩИМ РОБОТОМ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ…………………………………………………..…….18
Глущенко А. И., Петров В. А., Молодых А. В.
О ПРИМЕНЕНИИ НЕЙРОСЕТЕВОГО НАСТРОЙЩИКА ДЛЯ КОМПЕНСАЦИИ ДРЕЙФА МЕХАНИЧЕСКОЙ ЧАСТИ СИНХРОННОГО ДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ………………………………………………….………….26
Гончаров А. А.
ПОВЫШЕНИЕ СКОРОСТИ ЛОГИЧЕСКОГО ВЫВОДА ПРОДУКЦИОННЫХ ЭКСПЕРТНЫХ СИСТЕМ С ПОМОЩЬЮ АСПЕКТНО-ОРИЕНТИРОВАННОГО ПОДХОДА……………………………………….……………………………………………… 32
Грачев А. В.
СРАВНИТЕЛЬНЫЙ АНАЛИЗ РЕЗУЛЬТАТОВ МОДЕЛИРОВАНИЯ СОСТОЯНИЯ УЗЛА И ЕГО ПРОГОНОЗ В ЗАДАЧАХ УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ
СЕТЕВОЙ СТРУКТУРОЙ………………………………………………………………...…….39
Гребнев В. И., Зенович А. В.
АЛГОРИТМ ДИАГНОСТИКИ ОНКОЛОГИЧЕСКИХ ЗАБОЛЕВАНИЙ МОЛОЧНЫХ ЖЕЛЕЗ С ПРИМЕНЕНИЕМ АППАРАТА НЕЧЕТКИХ МНОЖЕСТВ…………..………….43
Гришин Е. М., Лазарев А. А.
АЛГОРИТМЫ СОСТАВЛЕНИЯ РАСПИСАНИЯ ОБСЛУЖИВАНИЯ ТО-2 ЛОКОМОТИВОВ В ДЕПО………………………………………………………………….…. 47
Еременко Ю. И., Глущенко А. И., Фомин А. В.
ИЗУЧЕНИЕ ВОЗМОЖНОСТИ КОМПЕНСАЦИИ ВОЗМУЩЕНИЙ, ДЕЙСТВУЮЩИХ НА ПЕЧЬ НАГРЕВА МЕТАЛЛА ПЕРЕД ПРОКАТОМ, С ПОМОЩЬЮ НАСТРОЙКИ ПИ-РЕГУЛЯТОРА………………………………………………………………………..…….. 53
Карманов А. В.
РАЗРАБОТКА МОДЕЛИ РАДИАЦИОННОЙ ДЕСТРУКЦИИ ЭЛАСТОМЕРОВ………… 60
Кривогина Д. Н., Харитонов В. А.
УПРАВЛЕНИЕ ПОЗИЦИОНИРОВАНИЕМ СИСТЕМЫ ПРОИЗВОДСТВА АССОРТИМЕНТА СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ……………………………….……. 64
Коврижных О. А., Цуканов М. А.
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ПРОИЗВОДСТВЕННОЙ ПРОГРАММЫ МЕТАЛЛУРГИЧЕСКОГО ПРОИЗВОДСТВА НА ОСНОВЕ ФРАКТАЛА КАНТОРА …...71
255
Милосердов О. А., Губко М. В., Ямпольский Ю. П., Рыжих В. Е.
ПРЕДСКАЗАНИЕ ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК СТЕКЛООБРАЗНЫХ ПОЛИМЕРОВ ПО ЗАВИСИМОСТИ ПЛОЩАДИ МАКРОМОЛЕКУЛЫ ОТ РАДИУСА ОБКАТКИ……………………………………………………………………………………….. 76
Неизвестный О. Г.
ДИНАМИЧЕСКАЯ МОДЕЛЬ И УПРАВЛЕНИЕ РЕАКТОРОМ ДЕГИДРИРОВАНИЯ….. 81
Некрасов И. В., Правдивец Н. А.
УСОВЕРШЕНСТВОВАННАЯ ЗАДАЧА ОПЕРАТИВНОГО ПЕРЕПЛАНИРОВАНИЯ ЗАГРУЗКИ ЦЕХА С УЧЁТОМ ТЕКУЩЕЙ ВЫРАБОТКИ ПО НАЗНАЧЕННЫМ ЗАКАЗАМ…………………………………………………………………..…………………… 85
Рассадин Ю. М.
УПРАВЛЕНИЕ МОБИЛЬНЫМ РОБОТОМ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ…....91
Роговая Л. А.
ФОРМАЛИЗАЦИЯ ЗАДАЧИ ОПТИМИЗАЦИИ ПРОЦЕССА ОЦЕНКИ СООТВЕТСТВИЯ ПРОДУКТА………………………………………………………………. 98
Синюкова Т. В., Синюков А. В.
НЕАДАПТИВНЫЕ НАБЛЮДАТЕЛИ В СИСТЕМАХ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ…………………………………………………………….………… 103
Синюкова Т. В., Синюков А. В., Синюкова А. А.
ПРИМЕНЕНИЕ АДАПТИВНЫХ НАБЛЮДАТЕЛЕЙ В СИСЕМЕ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ…………………………..……..110
Цуканов М. А.
ПРИНЦИП РЕАЛИЗАЦИИ МНОГОАЛЬТЕРНАТИВНОГО АГЕНТА КАК ИНСТРУМЕНТ ПРИНЯТИЯ УПРАВЛЯЮЩИХ РЕШЕНИЙ……………………………… 116
Широкий А. А., Зекий А. О., Крылова А. С.
МОДИФИКАЦИЯ ЛЕЧЕНИЯ НЕСЪЕМНЫМИ ПРОТЕЗАМИ НА ИМПЛАНТАТАХ НА ОСНОВЕ МОДЕЛИ УПРАВЛЕНИЯ ПРОЦЕССОМ ОСТЕОИНТЕГРАЦИИ………...…… 121
ФУНДАМЕНТАЛЬНЫЕ МАТЕМАТИЧЕСКИЕ ОСНОВЫ ТЕОРИИ УПРАЛЕНИЯ
Подвальный С. Л., Васильев Е. М.
ЭВОЛЮЦИОННАЯ КОНЦЕПЦИЯ МНОГОАЛЬТЕРНАТИВНОСТИ И КИБЕРНЕТИЧЕСКИЕ ПРИНЦИПЫ УПРАВЛЕНИЯ………………………….…………. 129
Берсенев Н. В.
ЗАДАЧА ВЫБОРА ОПТИМАЛЬНОГО СПЕКТРА ПО ЗАДАННОЙ ТОЧНОСТИ СХОДИМОСТИ ВЫХОДА СИСТЕМЫ……………………………………………………….132
Гилязова А. А., Федянин Д. Н.
ДИНАМИКА ГРАФОВ СОЦИАЛЬНЫХ СЕТЕЙ, ПОСТРОЕННЫХ ПО АЛГОРИТМУ С ОТСЕВОМ АКТИВНЫХ УЗЛОВ……………………………………... 135
Кобелев В. С., Моисеев С. И.
ИССЛЕДОВАНИЕ ЛИНЕЙНОСТИ ОЦЕНОК ЛАТЕНТНЫХ ПЕРЕМЕННЫХ, ВЫЧИСЛЕННЫХ ПО МОДЕЛИ РАША………………………………..……………………. 139
Котов П. А.
ОБ УСТОЙЧИВОСТИ САМОЛЕТА С АВТОМАТИЧЕСКОЙ СИСТЕМОЙ РУЧНОГО УПРАВЛЕНИЯ ПРЕДСТАВИМОГО УРАВНЕНИЕМ РАЗРЕШЕННЫМ
ОТНОСИТЕЛЬНО ПРОИЗВОДНЫХ С ШИРОКИМИ НАЧАЛЬНЫМИ |
|
УСЛОВИЯМИ............................................................................................................................... |
144 |
Кочетков С. А. |
|
УПРАВЛЕНИЕ СИНХРОННЫМ ДВИГАТЕЛЕМ В УСЛОВИЯХ |
|
НЕОПРЕДЕЛЕННОСТИ И ПРИ НЕПОЛНЫХ ИЗМЕРЕНИЯХ.......................... |
………………… 151 |
256 |
|
Краснов Д. В.
СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИМ ОБЪЕКТОМ С НАБЛЮДАТЕЛЕМ СОСТОЯНИЯ ПОНИЖЕННОГО ПОРЯДКА………………………… 158
Леонидов А. В., Сергеев В. А.
ЭФФЕКТЫ ПАМЯТИ В ЗАДАЧЕ О БИНАРНОМ ВЫБОРЕ НА ГРАФАХ…………………166
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В УПРАВЛЕНИИ
Баркалов С. А., Гайдаш К. А. Ерешко Ф. И , Меденников В. И.
ФОРМИРОВАНИЕ ЕДИНОГО ИНФОРМАЦИОННОГО ИНТЕРНЕТ-ПРОСТРАНСТВА ВЗАИМОДЕЙСТВИЯ ОТРАСЛЕЙ……………………….173
Киселева Т. В., Маслова Е. В.
ИЗВЕСТНЫЕ МЕТОДЫ КЛАССИФИКАЦИИ ИНФОРМАЦИОННЫХ РИСКОВ КАК ОБОБЩЕНИЕ ОПЫТА В ЭТОЙ ОБЛАСТИ………………………………………………… 180
Андриевский О. А.
РАЗРАБОТКА ИНФОРМАЦИОННОГО ОБМЕНА ПО СТАНДАРТУ ETHERNET ПРОТОКОЛА UDP……………………………………………………………………………. 184
Арапов Д. В.
ДИНАМИЧЕСКАЯ МОДЕЛЬ СИНТЕЗА ВИНИЛАЦЕТАТА НА ОСНОВЕ ЭТИЛЕНА… 188
Багно О. П., Белоусов В. Е., Нижегородов К. А.
АЛГОРИТМ ПОСТРОЕНИЯ ИЕРАРХИЧЕСКОЙ СИСТЕМЫ ОБОБЩЕННЫХ СЕТЕВЫХ МОДЕЛЕЙ………………………………………………………………..……….. 193
Дубинко К. Е., Столяров А. Ю.
РАЗРАБОТКА ИНФОРМАЦИОННОЙ СИСТЕМЫ ДЛЯ КОНТРОЛЯ ПАЦИЕНТОВ С ХРОНИЧЕСКОЙ СЕРДЕЧНОЙ НЕДОСТАТОЧНОСТЬЮ……………... 200
Егоров Е. Ю.
ИНТЕГРИРОВАННАЯ СИСТЕМА БЕЗОПАСНОСТИ КАК ПРЕДМЕТ СИСТЕМНОГО АНАЛИЗА……………………………………………………………………………………….. 207
Еременко Ю. И, Олюнина Ю. С.
ОБ ОЦЕНКЕ ЗНАЧИМОСТИ ПАРАМЕТРОВ КЛАВИАТУРНОГО ПОЧЕРКА ПОЛЬЗОВАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ГЛАВНЫХ КОМПОНЕНТ………. 211
Зверева Д. Д.
ОБ ОДНОМ ПОДХОДЕ К ОЦЕНКЕ ПРОПУСКНОЙ СПОСОБНОСТИ ИНФОКОММУНИКАЦИОННОЙ СЕТИ…………………………..………………………….216
Кулешова И. П., Морозов В. П , Баутина Е. В., Баркалов С. А.
ИСПОЛЬЗОВАНИЕ ЭКСПЕРТНЫХ СИСТЕМ В ИНВЕСТИЦИОННОЙ ДЕЯТЕЛЬНОСТИ ЭКОНОМИЧЕСКОЙ ОРГАНИЗАЦИИ…………………………………. 220
Кокоулин А. Н., Дзыгарь А. В.
ОБ ОЦЕНКЕ ЗНАЧИМОСТИ ПАРАМЕТРОВ КЛАВИАТУРНОГО ПОЧЕРКА ПОЛЬЗОВАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ГЛАВНЫХ КОМПОНЕНТ….…… 225
Кокоулин А. Н., Тур А. И., Князев А. И., Южаков А. А.
ВОПРОСЫ РАЗРАБОТКИ ОТКРЫТОЙ ПЛАТФОРМЫ ДЛЯ СОЗДАНИЯ ИНТЕЛЛЕКТУАЛЬНЫХ АВТОМАТИЗИРОВАННЫХ СИСТЕМ БЕЗОПАСНОСТИ И КОНТРОЛЯ ДОСТУПА НА ОХРАНЯЕМЫХ ОБЪЕКТАХ, ИНТЕГРИРУЕМЫХ В БИЗНЕС-ПРОЦЕССЫ ОРГАНИЗАЦИЙ………………………………………………………229
Петров И. В., Михальский А. И.
ПРИМЕНЕНИЕ МЕТОДА ОЦЕНКИ ВЗАИМНОЙ ИНФОРМАЦИИ ДЛЯ ПРЕДСКАЗАНИЯ УСТОЙЧИВОСТИ ПЕНТАПЕПТИДОВ ПО ДАННЫМ МОЛЕКУЛЯРНО-ДИНАМИЧЕСКИХ РАСЧЕТОВ…………………………………………. 236
257

Сафронов В. В.
БЕСШОВНАЯ ИНТЕГРАЦИЯ КРУПНЫХ ПРОГРАММНЫХ КОМПЛЕКСОВ В ИНТЕГРИРОВАННЫХ СИСТЕМАХ УПРАВЛЕНИЯ……………………………………….241
Хуснуллин Н. Ф.
СИСТЕМА УПРАВЛЕНИЯ ПОСТРОЕНИЕМ РАСПИСАНИЙ ПОДГОТОВКИ КОСМОНАВТОВ……………………………………………………………………………….. 246
Шинкарюк А. Г, Рассадин Ю. М.
ВИРТУАЛЬНЫЙ СТЕНД ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПРИ РАЗЛИЧНЫХ ТИПАХ ОБРАТНОЙ СВЯЗИ…………………………………………………………………...250
Научное издание
УПРАВЛЕНИЕ БОЛЬШИМИ СИСТЕМАМИ
Сборник трудов XV Всероссийской школы-конференции молодых ученых
(г. Воронеж, 10-13 сентября 2018 г.)
В2-х томах
Том 2 Материалы отпечатаны в авторской редакции
Подписано в печать 01.11.2018. Формат 60×84 1/8. Бумага писчая.
Усл. печ. л. 32,3. Тираж 100 экз. Заказ № 294.
ФГБОУ ВО «Воронежский государственный технический университет» 394026 Воронеж, Московский проспект, 14
Отдел оперативной полиграфии ВГТУ 394006 Воронеж, ул. 20-летия Октября, 84
258