

Учебное пособие 800628
.pdfxi j 0 , j 1,n 2 xin 1 in ,
xin in 1 , xin 1 xin i1
при этом min i1.
Доказательство. Исключим все наборы кроме i1, in-1 и in. Фиксируем время работы xi1
набора i1. Имеем
xin 1 in xi1 , xin in 1 xi1 ,
xin 1 xin i1.
Пусть in 1 |
in |
|
i1 |
. Возьмем xin 1 |
in xi1 |
, xin |
in 1 |
xi1 |
, |
||||||||||||||||||||||||||
xin |
xin 1 x1 in 1 in |
xi1 . |
|
|
|
|
|
|
|||||||||||||||||||||||||||
Продолжительность всех работ тем меньше, чем больше xi1. |
|
||||||||||||||||||||||||||||||||||
Имеем xin 1 |
xin |
in |
in 1 |
2xi i1 . |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
i |
n |
i |
n 1 |
i |
|
|
|
|
|
|
|
|
|
|
||||||||||||
Получаем |
x |
|
|
|
|
|
|
|
|
|
|
1 |
, |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
i1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
n |
i |
n |
1 |
i |
|
|
|
|
|
|
|
|||||||||
x |
|
|
in |
x |
i1 |
|
|
|
|
|
|
|
|
|
1 |
|
, |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
in 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
i |
n |
i |
|
|
|
|
|
|
|
|||||||||
x |
|
|
|
|
|
x |
|
|
|
|
n 1 |
|
|
|
|
1 |
, |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
in |
|
in1 |
|
i1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
i |
n |
1 |
i |
n |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
min |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Пусть in 1 |
|
in |
|
i1 |
. В этом случае |
xi1 |
0 , а xin 1 |
xin |
i1 |
. Любые значения |
|||||||||||||||||||||||||
xin 1 , xin , удовлетворяющие условиям
xin 1 in , xin in 1 , xin 1 xin i ,
101
определяют оптимальные решения задачи с величиной min i1.
Заметим теперь, что при полученном решении все задачи от i2 до in-2 также будут выполнены.
Теорема доказана.
В работе формализована задача оптимизации процесса оценки соответствия продукта, на примере синтетических каучуков, которая заключалась в построении расписаний работ, обеспечивающих минимальное время выполнения всех работ с учетом ограничений на число специалистов различного типа, выполняющих эти работы. Рассмотрен частный случай задачи, когда максимальные наборы содержат все команды специалистов за исключением одной.
Библиографический список
1.Баркалов С.А., Бурков В.Н. Минимизация упущенной выгоды в задачах управления проектами : препринт. – М.: Ин-т проблем управления РАН, 2001. – 56 с.
2.Баркалов С.А., Сенюшкин А.В., Янин А.Г. Построение календарного плана при рекомендательных зависимостях между работами // Известия КГАСУ. – 2011. - № 3(17).
–С. 252-256.
3.Brucker P., Drexl A., Mohring R. et al. Resource-constrained Project Scheduling: Notation, Classification, Models, and Methods // European Journal of Operational Research. 1999. Vol. 112. P. 3-41.
4.Kolish R., Padman R. An Integrated Survey of Deterministic Project Scheduling // OMEGA - The International Journal of Management Science. 2001. Vol. 29. P. 249-272.
5. Lazarev A. A., Kvaratskhelia A. G.Properties of optimal schedules for the minimization total weighted completion time in preemptive equal-length job with release dates scheduling problem on a single machine // Automation and Remote Control. 2010. 71, No. 10. P. 2085-2092.
6.Сервах В.В. Эффективно разрешимый случай задачи календарного планирования с возобновимыми ресурсами / Дискретный анализ и исследование операций. – 2000. – Сер. 2. – Т. 7. - № 1. – С. 75-82.
7.Gafarov E. R., Lazarev A. A., Werner F. Single machine scheduling problems with financial resource constraints: some complexity results and properties // Mathematical Social Sciences. 2011. 62, No. 1.
8.Сервах В.В., Щербинина Т.А. О сложности одной задачи календарного планирования со складируемыми ресурсами // Вестник Новосибирского государственного университета. Серия Математика, механика, информатика. – 2008. – Т. 8. - № 3. – С.105-112.
9.Бурков В.Н., Бондарик В.Н., Нгуен Х.Т., Селезнев А.А. Задача разработки календарных планов по критерию упущенной выгоды // Системы управления и информационные технологии. – 2013. – Т. 53. - № 3. – С. 32-35.
10.Россихина Л.В. Постановка задачи формирования календарного плана с взаимозависимыми мероприятиями и алгоритм ее решения // Вестник Воронеж. ин-та МВД России. – 2014. - № 3. – С. 81-89.
11.Бурков В.Н. Распределение ресурсов как задача оптимального быстродействия
//Автоматика и телемеханика. 1966. № 7. С. 119-129.
102

УДК 681.511.4
НЕАДАПТИВНЫЕ НАБЛЮДАТЕЛИ В СИСТЕМАХ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Т.В. Синюкова, А.В. Синюков ФГБОУ ВО «Липецкий государственный технический университет»
Анализ и дальнейшее совершенствование существующих систем управления электроприводами позволяет добиться значительных результатов по многим показателям. Использование неадаптивных наблюдателей в системах управления электроприводами ведет к уменьшению габаритов устройства в целом и повышению его надежности.
NONADAPTIVE OBSERVERS IN ELECTRIC POWER CONTROL SYSTEMS
T.V. Sinyukova, A.V. Sinyukov
FGBOU VO "Lipetsk State Technical University"
Analysis and further improvement of existing electric drive control systems allows achieving significant results in many indicators. The use of non-adaptive observers in the control systems of electric drives leads to a reduction in the overall dimensions of the device and its reliability.
Основными требованиями, предъявляемыми как к существующим системам управления электроприводами, так и к вновь разрабатываемым или подвергающимся усовершенствованию, являются, наряду с экологичностью и энергоэффективностью [1, 2], экономичность и надежность. Достижение данных критериев становится возможным при использовании автоматизированного электропривода, нашедшего применение в механизмах различного промышленного и бытового назначения.
Среди общепромышленных механизмов значительную часть составляют механизмы передвижения, работающие в условиях, где наблюдаются: тряски, вибрации, запыленность, возможно наличие высокой температуры и влажности - что негативно отражается на устройствах контроля и передачи информации о состоянии объекта. Режимом работы такого типа механизмов является повторно-кратковременный цикл, состоящей из частых пусков, реверсов и торможений.
На сегодняшний день, актуальным, по многим показателям, является использование, для систем управления механизмами передвижения, частотного привода, имеющего в своем составе асинхронный электродвигатель с короткозамкнутым ротором [3, 4, 5].
К улучшению характеристик частотно-регулируемых приводов привело использование систем с прямым управлением моментом и бездатчиковых систем управления, в которых присутствуют только датчики тока и напряжения, установленные внутри преобразователя частоты. Данные системы востребованы в виду того, что ведут к снижению стоимости электропривода в целом и позволяют решить проблемы, связанные с присутствием датчиков в системах управления, такие, как, необходимость дополнительных коммуникационных линий, погрешность измерения, низкая надежность. В данном случае, для создания бездатчиковых систем управления возникает необходимость в специальных алгоритмах – наблюдателях состояния, представляющих собой некую структуру, дающую возможность производить оценку по известным параметрам неизвестные [6, 7, 8].
© Синюкова Т.В., Синюков А.В., 2018
103
Использование наблюдателей состояния в системах управления имеет ряд проблем, таких как прямая зависимость качества работы наблюдателя от точности задания параметров модели двигателя, точности измерения напряжения, а имеющаяся у наблюдателей некая динамика, ведет к ограничению быстродействия системы. Решение данных проблем является актуальной темой для исследования.
Из проведенного анализа существующих наблюдателей было выявлено, что не актуальными для использования в системах управления механизмами передвижения являются измеряющие наблюдатели, так как присутствующие при их функционировании изменения гармонического спектра статорных токов и напряжений приводят к потерям и в преобразователе, и в электродвигателе, и, как следствие, к уменьшению кпд всего электропривода. Наблюдатель на основе фильтра Калмана сложен с позиций математического описания и требует определенной узконаправленной подготовки, так же данный тип наблюдателя предназначен для линейных систем, а рассматриваемый объект имеет асинхронный двигатель, представляющий собой нелинейный динамический механизм.
В проведенных исследованиях для механизмов передвижения была рассмотрена возможность использования неадаптивных наблюдателей. Полученные результаты оценивались по максимальной точности оценки переменных состояния, минимальной чувствительности к изменениям параметров двигателя, возможности физической интерпретации, отсутствию громоздких математических вычислений, доступности в понимании подхода
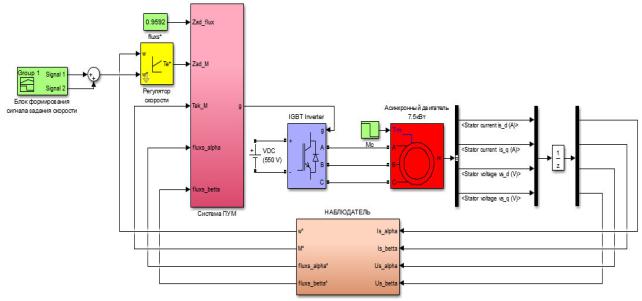
. Имитационное моделирование систем с данными типами наблюдателей было произведено в среде компьютерного моделирования Matlab (рисунок 1), за основу взята классическая система с прямым управлением моментом электропривода, в которой для увеличения надежности и уменьшения габаритов системы управления датчики были заменены наблюдателями состояния [9].
Рисунок 1 – Система прямого управления моментом с наблюдателем
В неадаптивных наблюдателях оценка неизвестных величин базируется на математическом описании асинхронного двигателя в неподвижной системе координат, из которого можно несколькими способами получить значение скорости.
При первом способе построения неадаптивного наблюдателя значение скорости было получено из уравнений напряжения ротора [10]. Данный способ отличается простотой и доступностью для понимания, но существует некоторая сложность в определении значений
104
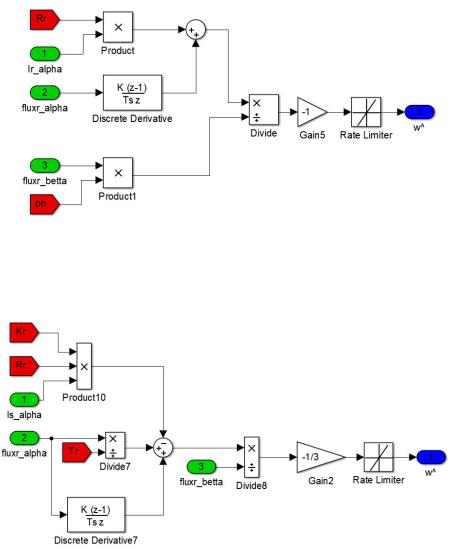
потокосцепления и тока ротора, реализация данного наблюдателя в Simulink представлена на рисунке 2.
Во втором способе построения неадаптивного наблюдателя также за основу были взяты уравнения напряжения ротора, но управляющим сигналом уже является не ток ротора, а ток статора, реализация данного наблюдателя в Simulink представлена на рисунке 3.
Третий вариант построения неадаптивного наблюдателя основывается на определении, на основе измеренных значений напряжения и тока статора, частоты напряжения питания и частоты роторной ЭДС, реализация данного наблюдателя в Simulink представлена на рисунке 4.
На рисунках 5-10 представлены совмещенные результаты, полученные при моделировании системы с наблюдателем и системы с датчиком. При моделировании были использованы разные типы неадаптивных наблюдателей.
Рисунок 2 – Первый способ реализации неадаптивного наблюдателя
Рисунок 3 – Второй способ реализации неадаптивного наблюдателя
105
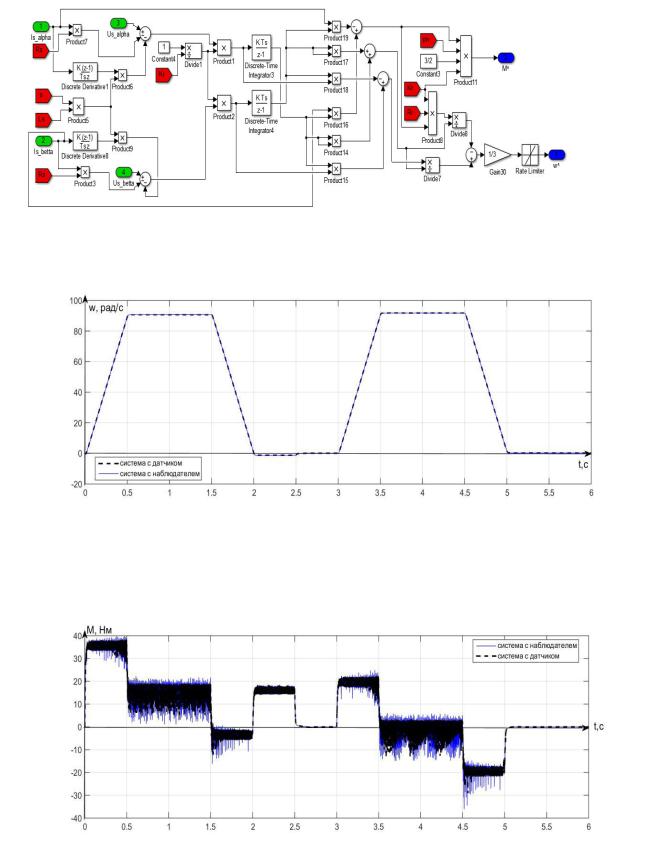
Рисунок 4 - Третий способ реализации неадаптивного наблюдателя
Рисунок 5 – График угловой частоты вращения, при реализации неадаптивного наблюдателя первым способом
Рисунок 5 – График электромагнитного момента, при реализации неадаптивного наблюдателя первым способом
106
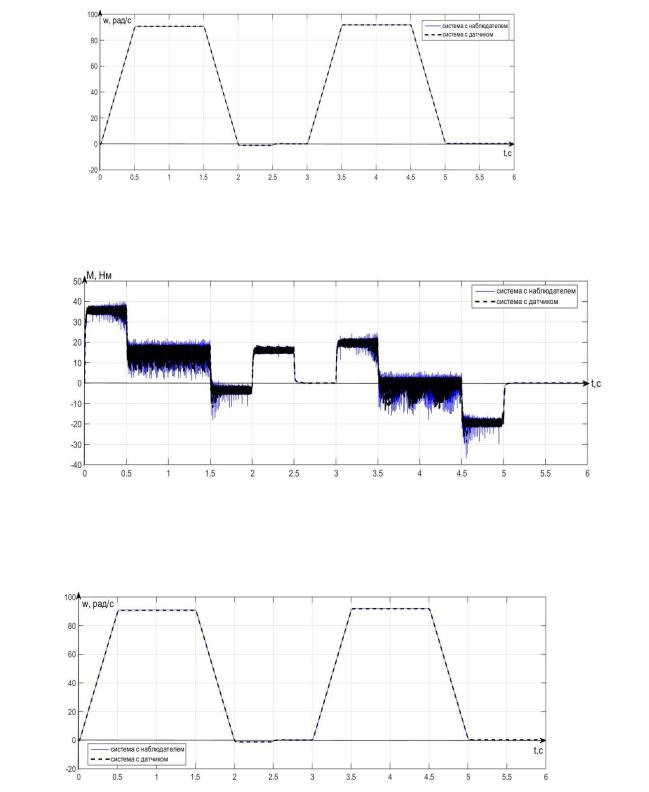
Рисунок 5 – График угловой частоты вращения, при реализации неадаптивного наблюдателя вторым способом
Рисунок 5 – График электромагнитного момента, при реализации неадаптивного наблюдателя вторым способом
Рисунок 5 – График угловой частоты вращения, при реализации неадаптивного наблюдателя третьим способом
107
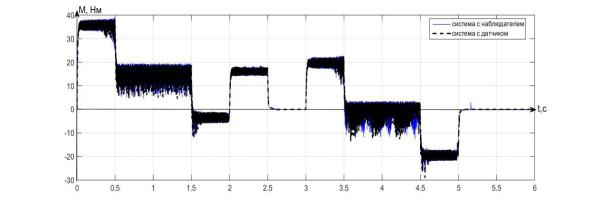
Рисунок 5 – График электромагнитного момента, при реализации неадаптивного наблюдателя третьим способом
Полученные при исследовании графики позволяют сделать выводы:
–результаты моделирования являются доказательством работоспособности реализованных неадаптивных наблюдателей состояния, наблюдаемые величины определяются с хорошей точностью;
–реализованные наблюдатели просты и доступны для понимания;
–в первом способе при расчете скорости задействованы потокосцепление и ток ротора, которые довольно сложно определить;
- во втором способе используется ток статора, значение которого доступно со стандартного датчика тока, но определение величины потокосцепления ротора также является проблемным моментом, так как необходим соответствующий датчик, что является существенным недостатком для разрабатываемой бездатчиковой системы;
–третий способ реализации неадаптивного наблюдателя имеет значительное преимущество, так как для расчета необходимы только датчики тока и напряжения статора.
Библиографический список
1.Синюкова, Т.В. Энергосбережение в системах управления электроприводами производственных механизмов [Текст] / Т.В. Синюкова, П.Н. Левин, А.В. Синюков // Актуальные проблемы энергосбережения и эффективности в технических системах: тезисы докладов 3-ей Международной конференции с элементами научной школы 25–27 апреля 2016 г.
–Тамбов, 2016. С. 138.
2.Синюкова, Т.В. Энергосберегающие системы управления металлургическими электроприводами [Текст] / Т.В. Синюкова, Р.В. Прокудин, А.В. Синюков // Актуальные проблемы энергосбережения и эффективности в технических системах: тезисы докладов 3-ей Международной конференции с элементами научной школы 25–27 апреля 2016 г. – Тамбов, 2016. С. 139.
3.Синюкова, Т.В. Анализ и математическое моделирование системы управления приводом механизма передвижения [Текст] / Т.В. Синюкова, А.В. Синюков // Электроэнергетика и электротехника: сборник научно-технических трудов международной конференции. – Воронеж: НОУ ВПО «Международный институт компьютерных технологий», 2017. С. 117-120.
4.Мещеряков, В.Н. Моделирование электропривода с дополнительной коррекцией напряжения статора для асинхронного двигателя с короткозамкнутым ротором [Текст] / В.Н. Мещеряков, Т.В. Синюкова, А.И. Бойков // Вестник национального технического
университета «ХПИ» Тематический выпуск: Проблемы автоматизированного
108
электропривода. Теория и практика. – Харьков, 2013. – №36 (1009). С. 519.
5.Мещеряков, В.Н. Моделирование асинхронного двигателя с преобразователем
частоты в программе MATLAB [Текст] / В.Н. Мещеряков, П.Н. Левин, Т.В. Синюкова // Современные сложные системы управления Х НТСS` 2012: материалы Международной научно-технической конференции. – Старый Оскол: ТНТ, 2012. С. 53-54.
6.Синюкова, Т.В. Метод ускорения поискового алгоритма для прямого управления моментом [Текст] / Т.В. Синюкова, П.Н. Левин // Приборы и системы. Управление, контроль, диагностика. – 2013. – №12. С. 60-63.
7.Синюков, А.В. Моделирование системы прямого управления моментом асинхронного двигателя [Текст] / А.В. Синюков, Т.В. Синюкова // Сборник тезисов докладов научной конференции студентов и аспирантов Липецкого государственного технического университета [Текст]: В 2-х ч. Ч.2. – Липецк: Изд-во Позитив-Л, 2016. С. 60-62
8.Мещеряков, В.Н. Бездатчиковое определение частоты вращения роторной эдс [Текст] / В.Н. Мещеряков, Т.В. Синюкова // Научно-технический журнал Вестник ЛГТУ. – Липецк: ЛГТУ, 2014. С. 117-120.
9.Соколовский, Г.Г. Электроприводы переменного тока с частотным регулированием [Текст]: учеб. пособие для студ. высш. учеб. заведений / Г.Г. Соколовский. – М.: Издательский центр «Академия», 2006. – 272с.
10.Калачев, Ю.Н. Наблюдатели состояния в векторном электроприводе (записки дилетанта) [Текст] / Ю.Н. Калачев. – М., 2015. – 60 с.
109

УДК 681.551
ПРИМЕНЕНИЕ АДАПТИВНЫХ НАБЛЮДАТЕЛЕЙ В СИСТЕМЕ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ
Синюкова Т.В., А.В. Синюков, А.А. Синюкова ФГБОУ ВО «Липецкий государственный технический университет»
К механизмам передвижения, являющихся составной частью сложных и ответственных технологических объектов на промышленных предприятиях, предъявляются высокие требования. Усовершенствование и повышение надежности данных систем возможно за счет использования адаптивных наблюдателей.
APPLICATION OF ADAPTIVE OBSERVERS IN THE ELECTRIC MOVEMENT MANAGEMENT SYSTEM OF THE MOVEMENT MECHANISM
T.V. Sinyukova, A.V., Sinyukov, A.A. Sinyukova
FGBOU VO "Lipetsk State Technical University"
Тo the mechanisms of movement, which are an integral part of complex and responsible technological objects of industrial enterprises, high demands are made. Improving and increasing the reliability of these systems is possible through the use of adaptive observers.
Создание высококачественных, обладающих высокой точностью, систем управления электроприводами охватывает решение ряда задач, направленных на разработку надежных и экономически выгодных силовых преобразователей напряжения, нахождение оптимальных законов управления при установленных диапазонах точности регулирования. На текущий момент, исследования по использованию интеллектуальных систем управления носят массовый характер. Большой интерес представляют бездатчиковые системы, использование которых позволяет уменьшить стоимость электрического привода и решить ряд проблем, возникающих при использовании датчиков в устройстве. Положительной составляющей отсутствия датчика в системе управления является повышение надежности устройства. Достойной альтернативой датчиков на механизмах передвижения могут стать адаптивные наблюдатели – адаптивная система с эталонной (задающей) и адаптивной моделями. Данные модели были получены на основании математического описания асинхронного двигателя с короткозамкнутым ротором в неподвижной декартовой системе координат. Наиболее доступным и часто используемым способом подачи данных моделей является принятие за эталонную (задающую) модель модели статора, а за адаптивную модель модели ротора. Регулирующий адаптер производит сравнение потоков моделей и осуществляет вырабатку с помощью адаптирующего регулятора сигнала оценки скорости, на основании закона адаптации, базирующегося на матричном описании реальных электромагнитных процессов в роторе двигателя, уравнении отклонения наблюдателя, оценке устойчивости наблюдателя с помощью функции Ляпунова, дополненного пропорционально-интегральным регулятором, осуществляющим сведение разности фаз между векторами истинного и оцененного потокосцеплений ротора (рисунок 1). В результате оценки потока ротора на практике из-за присутствия в модели статора двух интеграторов, не имеющих обратной связи, возникнет нулевой корень в базовом уравнении, что ведет к проблематичности интегрирования появляющихся ошибок измерения тока и напряжения, и, как следствие, к постоянно накапливающейся ошибке оценки потока. Модель статора становится нейтрально
© Синюкова Т.В., Синюков А.В., Синюкова А.А, 2018
110