

Учебное пособие 800628
.pdfE(t) 0.5 (e2 |
(t) e2 |
(t) e2 |
(t)) |
(2) |
|
|
|
|
|
На реальном объекте управления ошибку (2), из-за погрешности измерения и физических особенностей ОУ, невозможно свести к нулевому значению, поэтому должен быть выбран допустимый уровень Ne ошибки обучения (в опытах в данной работе он был равен 8 единиц из-за амплитуды «шума» датчиков). Таким образом, основное правило, используемое для запуска оперативного обучения, формулируется следующим образом: «производить обучение нейросетевого регулятора тогда, когда суммарная ошибка больше, чем Ne ед.». Скорости обучения выходного и скрытого слоя были экспериментально приняты равными: ηLW = 10-7; ηIW = 10-7. В процессе обучения они не корректировались.
В процессе функционирования балансирующего робота можно выделить два основных режима работы: 1) режим стабилизации, в котором от САУ требуется обеспечить стабильность ОУ при нулевых заданиях по всем координатам состояния; 2) режим выполнения пользовательского задания по координатам θ’ и/или φ’. К каждому из режимов работы предъявляются собственные требования относительно качества переходных процессов и, соответственно, для каждого из режимов существуют свои «наилучшие» весовые коэффициенты нейросетевого регулятора. Разработанный алгоритм выбора знаков коррекции весов нейронов выходного слоя, представленный на Рис. 3, позволяет подстраивать текущие веса таким образом, чтобы уменьшать ошибку (2) и обеспечивать наилучшее качества управления объектом с учетом текущего режима работы ОУ.
Алгоритм, представленный на Рис.3, основан на экспериментально полученных сведениях о LQR регуляторе и априорно известных сведениях об ОУ. Апостериорно стало известно, что при стремлении веса (соответствующего коэффициента LQR регулятора) для рассогласования по координате θint к нулю качество управления объектом в режиме отработки пользовательского задания улучшается, а в режиме стабилизации – ухудшается. Априорно известно, что знаки корректировок весов (коэффициентов LQR регулятора) должны совпадать у весов для рассогласований по координатам θ, θint, θ’.
Начало. |
|
E(t) > 0 |
|
Да |
|
Ref θ’= 0 |
Нет |
|
|
Да |
|
∆ωθint< 0; ∆ωθ < 0; |
∆ωθint > 0; ∆ωθ > 0; |
∆ωθ’ < 0 |
∆ωθ’ > 0 |
|
Обратное |
распространение |
|
|
ошибки |
|
Конец |
Рис. 3. Алгоритм выбора знака корректировок весов скрытого слоя.
21
Здесь, E(t) – функция ошибки обучения, Ref θ’ – задание по скорость поворота колёс, ∆ωθint – коррекция веса для нейрона выходного слоя отвечающего за рассогласование по интегралу от среднего угла поворота колёс, ∆ωθ – коррекция веса для нейрона выходного слоя отвечающего за рассогласование по среднему углу поворота колес, ∆ωθ’ – коррекция веса для нейрона выходного слоя отвечающего за рассогласование по скорости поворота колёс.
5.Эксперименты на реальном объекте управления.
Врассматриваемом опыте от нейросетевого регулятора требовалось обеспечить лучшее качество управления ОУ по сравнению с LQR регулятором в режиме стабилизации. Длительность проведения эксперимента при тестировании LQR регулятора и нейросетевого регулятора была принята равной 195 секундам. Переходные процессы ОУ под управлением LQR приведены на Рис.4, под управлением нейросетевого регулятора на Рис.5. Оценка качества решения задачи управления балансирующим роботом в данном режиме работы выражается в сравнении координат θint. Эта координата показывает пройденное ОУ расстояние относительно исходного положения. В режиме стабилизации лучшим считается тот регулятор, под управлением которого ОУ сместился на наименьшее расстояние относительно исходного положения.
Из Рис.4 и Рис.5 видно, что при управлении нейросетью объект преодолел меньшее расстояние (20 радиан за 195 секунд), чем при управлении LQR регулятором (1650 радиан за
195секунд). Так же заметно снижение роста оценки координаты ψ, что повышает стабильность ОУ. Визуальное наблюдения в течение эксперимента подтверждают полученные с датчиков данные.
Таким образом, результаты эксперимента подтверждают эффективность предложенного нейросетевого регулятора, системы ограничений на оперативное обучение и алгоритма выбора знака корректировок в режиме стабилизации ОУ.
6.Заключение.
Внастоящей работе разработан подход к синтезу нейросетевого регулятора для управления балансирующим роботом в режиме реального времени. Предложена база ограничений на оперативное обучение такого регулятора, выстроен алгоритм выбора знака корректировок весов. Результаты эксперимента показали, что при нейросетевом управлении объект преодолел меньшее расстояние (20 радиан за 195 секунд), чем при управлении LQR регулятором (1650 радиан за 195 секунд). Таким образом, полученный интеллектуальный метод управления, позволяет повысить качество управления рассматриваемым объектом по сравнению с LQR в режиме стабилизации.
22
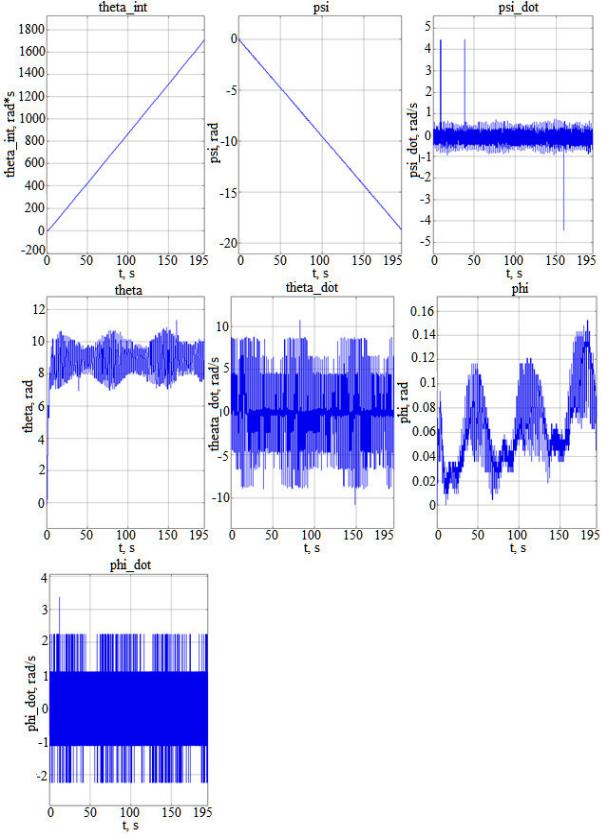
Рис. 4. Переходные процессы ОУ при управлении LQR.
23
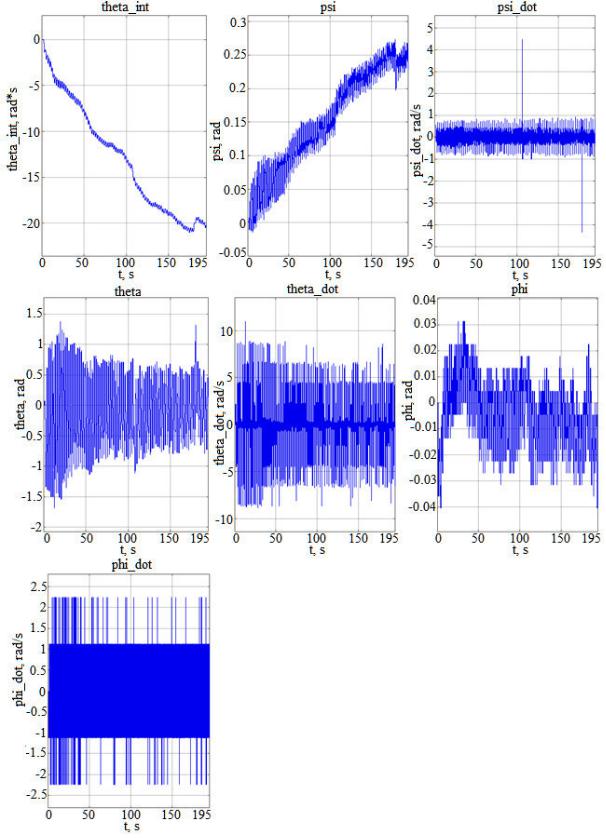
Рис. 5. Переходные процессы ОУ при управлением НС.
24
Библиографический список
5.Semenov M.E., Solovyov A.M., Meleshenko P.A. Elastic inverted pendulum with backlash in suspension: stabilization problem // Nonlinear Dynamics. – 2015. – Vol.82. – P. 677– 688.
6.Semenov M.E., Abbas Z.H., Ishchuk I.N., Kanishcheva O.I., Meleshenko P.A. Statefeedback control principles for inverted pendulum with hysteresis in suspension // Journal of Siberian Federal University. Mathematics & Physics. – 2016. – № 4(9). – P. 498-509.
7.White W, Fales R. Control of double inverted pendulum with hydraulic actuation: a case study. Proc Am Control Conf 1999:495–9.
8.Spong MW. The swing up control problem for the acrobat. IEEE Control Syst Mag 1995;15:72–9
9.Черноусько, Ф.Л. Управление колебаниями / Ф.Л. Черноусько, Л.Д. Акуленко, Б.Н. Соколов. – М.: Наука, 1980. – 383 с.
10.Zhou K., Doyle J.C., Glover K. Robust and optimal control. New Jersey: Prentice hall;
1996.
11.Y.Yamamoto, NXTway-GS Model-Based Design-Control of self-balancing twowheeled robot built with LEGO Mindstorms NXT. Cybernet Systems Co., Ltd, 2008, pp. 14-18.
12.Reed, Russell, and Robert J. MarksII. Neural smithing: supervised learning in feedforward artificial neural networks. Mit Press, 1999
Исследование проведено при финансовой поддержке Российского фонда фундаментальных исследований (грант № 18-47-310003 р_а).
25

УДК 004.8:621.313
О ПРИМЕНЕНИИ НЕЙРОСЕТЕВОГО НАСТРОЙЩИКА ДЛЯ КОМПЕНСАЦИИ ДРЕЙФА МЕХАНИЧЕСКОЙ ЧАСТИ СИНХРОННОГО ДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ
А.И. Глущенко, В.А. Петров, А.В. Молодых СТИ НИТУ МИСИС
В статье рассматривается вопрос применения нейросетевого настройщика для системы векторного управления скоростью вращения ротора СДПМ в условиях нестационарности параметров механической части указанного привода. Проведены эксперименты на математической модели электропривода. Настройщик позволил снизить перерегулирование по скорости относительно системы с обычным П-регулятором на 30%.
ON APPLICATION OF NEURAL TUNER TO COMPENSATE INERTIA MOMENT VALUE DRIFT FOR PERMANENT MAGNETS SYNCHRONOUS MOTOR
Glushchenko A.I., Petrov V.A., Molodykch A.V.
STI NUST “MISIS”
Еhe scope of this research is to apply the neural tuner for a vector control system of a permanent magnets synchronous motor speed under the conditions of its inertia moment value drift. The experiments with the mathematical model of the electric drive are conducted. The tuner allows to reduce the speed overshoot by 30% comparing to the control system with a conventional P- controller.
Введение.
Внастоящее время синхронные двигатели с постоянными магнитами (СДПМ) получают все большее распространение в промышленности ввиду развития векторных алгоритмов управления, позволяющих с высокой точностью поддерживать необходимый момент и скорость электропривода [1]. По этой причине данные электродвигатели используют в «ответственных» механизмах, например, в станках, производящих распил или выточку деталей. Однако, для точного функционирования указанной системы электропривода необходима точная настройка используемых в ней П и ПИ регуляторов [1] при условии, что система управления СДПМ очень чувствительна к изменениям параметров привода [2].
Вэтой связи было проведено достаточно много попыток отказаться от использования упомянутых линейных регуляторов и заменить их на регуляторы другого типа: дробного порядка [3]; адаптивные [4], робастные [5], регуляторы с упреждением [6]. Однако примеров реального использования подобных подходов достаточно мало, поскольку упомянутые изменения в приводе крайне редко могут быть заранее спрогнозированы и не всегда могут быть ограничены [7].
Поэтому несмотря на упомянутые трудности, для управления СДПМ в подавляющем большинстве случаев используются именно П и ПИ регуляторы, что обусловлено простым алгоритмом их внедрения, высокой эффективностью и понятностью настройки. В связи с чем более перспективной представляется разработка адаптивной системы, производящей подстройку их параметров в реальном масштабе времени. Для этих целей разработан ряд
подходов, в частности, основанных на использовании модели электропривода [8, 9].
© Глущенко А.И., Петров В.А., Молодых А.В., 2018
26
Применение этих методов ограничено в условиях производства и сильно зависит от точности измерений и построенных на этих данных моделей привода.
Ряд методов адаптивной настройки регуляторов позволяет обходиться без использования модели, в частности для СДПМ – это градиентный метод [10], для которого по-прежнему открыт вопрос выбора шага адаптации. Также к безмодельным подходам относят интеллектуальные методы, в частности, нейронные сети (НС) [11, 12] и нечеткую логику (НЛ) [13, 14]. НЛ позволяет отразить знания эксперта по настройке параметров регулятора для СДПМ, однако в указанных работах не решена проблема выбора и последующей подстройки значений коэффициентов нормировки входных и выходных параметров нечеткого настройщика. НС обучаются оперативно и обладают способностью к аппроксимации, что делает их применение наиболее перспективным относительно всех рассмотренных выше методов, однако в указанных работах не решена проблема выбора скорости оперативного обучения в зависимости от текущих условий и устойчивости рассматриваемой системы управления. В работе [15] приведен метод построения нейросетевого настройщика параметров регулятора скорости ДПТ, основанный на использовании нейронных сетей и лишенный указанных выше недостатков. В этом исследовании предлагается применить его для СДПМ в условиях изменения момента инерции механики привода, продемонстрировав его эффективность относительно системы без настройки параметров регулятора скорости.
Постановка задачи.
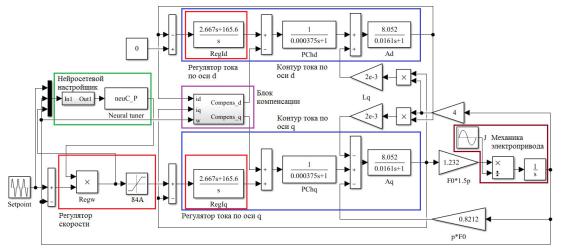
Во-первых, необходимо рассмотреть стандартную схему векторного управления скоростью вращения ротора СДПМ [11], приведенную на рис.1.
|
|
iqs ref |
|
uqs,uds |
|
|
|
|
|
|
СДПМ |
||
|
|
Регулятор |
|
Регулятор |
dq |
|
|
|
|
|
|
|
|
ωref |
|
скорости |
|
|
|
|
ШИМ |
|
|
|
|
||
ω |
|
тока |
abc |
|
|
|
|
|
|||||
|
ids ref=0 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
θ |
|
|
|
|
|
|
|
|
|
|
|
iqs |
ids |
|
i |
qs |
,i |
dq |
i |
,i |
,i |
c |
|
|
|
|
|
|
ds |
|
a |
b |
|
||||
|
|
|
|
|
|
|
|
θ |
abc |
|
|
ω,θ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 1. Структурная схема векторного управления скоростью вращения ротора СДПМ Задачей в данном случае является поддержание требуемой скорости ωref с помощью
П-регулятора скорости, который вырабатывает задание по проекции тока статора на ось q вращающейся системы координат ротора. Задание по второй проекции d обычно равно нулю для СДПМ. В блоке регулятора тока заключено два ПИ-регулятора для двух указанных выше проекций тока. Выходами этих регуляторов являются νqs – напряжение по оси q и νds – напряжение по оси d, которые затем с помощью преобразования Парка переводятся в неподвижную систему координат a-b-c и через ШИМ подаются на двигатель. С него, в свою очередь, снимаются фазные токи статора ia, ib, ic, которые преобразуются в проекции iqs и ids. Также с двигателя снимаются положение ротора θ и скорость его вращения ω.
Далее рассмотрим стандартное описание математической модели СДПМ.
Математическое описание СДПМ
Неявнополюсный СДПМ можно описать следующим образом [16]:
dids |
|
vds Rsids r Lsiqs Ls dt |
(1) |
v |
R i |
L i |
|
|
L |
diqs |
(2) |
f |
|
||||||
qs |
s qs |
r s ds |
r |
s dt |
|
||
где Rs – сопротивление статора, ωr – угловая частота вращения, Ls – индуктивность статора, ψf – магнитный поток.
27
|
|
P |
|
(3) |
|
||||
r |
2 |
|
|
|
P – число полюсов, ω – angular rotor mechanical speed. Момент рассчитывается, согласно (4):
M |
3 |
|
P |
|
i |
(4) |
|
2 |
|||||
2 |
|
f qs |
|
|||
где B – коэффициент вязкого трения; J – момент инерции, Mc – момент нагрузки. Моделирование будет производиться при следующих допущениях:TL = 0 и B = 0.
В данном исследовании предполагается, что СДПМ уже функционирует под управлением П-регулятора скорости, начальная настройка которого позволяет получать переходные процессы по скорости требуемого качества с точки зрения перерегулирования и колебательности. При этом параметр J медленно изменяет свое значение с течением времени. Задачей является подстройки параметра П-регулятора скорости таким образом, чтобы продолжать поддерживать качество переходных процессов, несмотря на указанный дрейф значения J, не имея модели ОУ. Для этого будет применен нейросетевой настройщик.
Нейросетевой настройщик
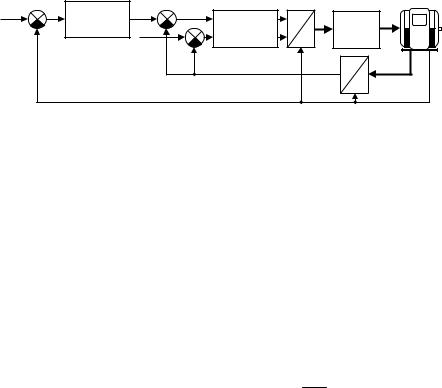
В данной работе для адаптивного управления СДПМ предлагается использование нейросетевого настройщика. Он (рис. 2) представляет собой сочетание искусственной нейронной сети и базы правил, которая определяет с какой скоростью и в какие моменты производить обучение нейронной сети.
ωref |
Регулятор |
iqsd |
|
|
|
|
|
|
|
СДПМ |
Регулятор |
dq |
|
|
|
|
|
|
|||
|
скорости |
|
|
|
ШИМ |
|
|
|
||
ω |
|
тока |
abc |
|
|
|
|
|||
kp |
idsd=0 |
|
|
|
|
|
||||
|
|
|
|
|
|
|||||
|
|
|
θ |
|
|
|
|
|
|
|
|
|
iqs |
ids |
i |
,i |
dq |
i |
,i |
,i |
|
|
|
|
qs |
ds |
|
a |
b |
c |
||
|
База правил |
Нейросетевой |
|
|
|
θ |
abc |
|
|
ω,θ |
|
настройщик |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
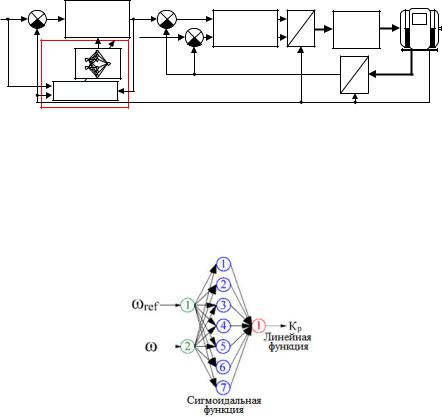
Рис.2. Структурная схема СДПМ с нейросетевым настройщиком регулятора скорости Структура используемой нейронной сети выбрана согласно [17] и приведена на рис. 3.
База правил подробно описана в [15] и реализована в виде программы на языке Matlab Script Language. Условия правил содержат описание ситуаций, когда качество переходного процесса не соответствует ожиданиям, а следствия – эмпирические формулы для расчета скорости обучения нейронной сети, что позволяет всегда поддерживать значение скорости на необходимом уровне, не превышая его. За это отвечает разработанный авторами метод оценки устойчивости системы управления с настройщиком [17].
Рис.3. Структурная схема нейросетевого настройщика
Нейросетевой настройщик вызывается один раз в Δt секунд. Значение данного параметра вычисляется согласно [18] (в данном случае Δt = 0.01 ms).
28
Результаты экспериментов
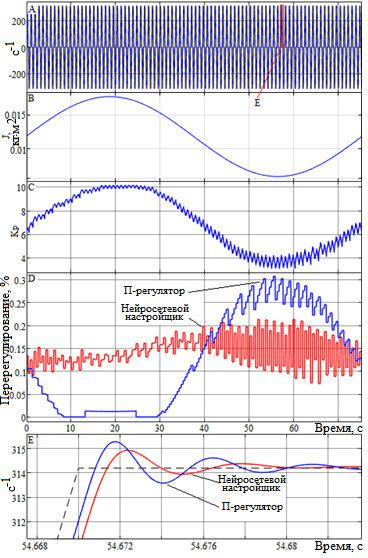
Для проведения экспериментов разработана модель синхронного двигателя с постоянными магнитами Siemens 1FK7103, являющегося типовым агрегатом подобного класса (рис. 4). Эксперимент производился следующим образом: в качестве задания для системы электропривода подавалась последовательность (рис. 6A) 0 – 314 рад/сек (номинальная скорость двигателя) – 0 -314 рад/сек – 0 (ускорение электропривода определялось ограничениями по току статора и составляло 2.8·103 рад/сек2).
При номинальных параметрах перерегулирование в контуре скорости составляет 0.104%.
Входе эксперимента изменения момента инерции принято в виде синусоиды (рис. 6B)
[19].Нейросетевой настройщик, руководствуясь базой правил, изменял значения П – регулятора скорости (рис. 6C). Характер изменения Кп регулятора в целом соответствует изменению момента инерции, что позволяет говорить об эффективном отслеживании изменения параметров электропривода нейросетевым настройщиком. Это позволило на протяжении всего эксперимента поддерживать значение перерегулирования в контуре скорости около начального значения (0.104) (рис. 6D красный график), по сравнению с системой без адаптации регулятора скорости (рис. 6D синий график).
Рис. 4. Модель СДПМ Нейросетевой настройщик позволил поддерживать перерегулирование в интервале
[0.075 0.216], для системы без адаптации регулятора скорости максимальное перерегулирование составило 0.307, а минимальное – 0, что свидетельствует о снижении быстродействия электропривода при некомпенсируемом увеличении момента инерции. При снижении момента инерции перерегулирование в системе управления без адаптации, напротив, превысило перегулирование в системе с настройщиком (максимальное перерегулирование для системы без настройки на 30% больше относительно системы с настройщиком), что позволило нейросетевому настройщику добиться повышения энергоэффекстивности на 3%.
Заключение
В заключении можно сказать, что применение адаптивных систем управления электроприводом СДПМ необходимо для точного регулирования скорости в условиях нестационарности его параметров. Выбранный в качестве механизма адаптации нейросетевой настройщик показал свою эффективность, о чем свидетельствуют результаты эксперимента. Нейросетевой настройщик при повышении момента инерции позволяет поддерживать динамику электропривода, а при снижении – сохранять требуемое перерегулирование. Нейросетевой настройщик в ходе эксперимента позволил снизить
29
перерегулирование относительно системы без настройки на 30%, а также повысить энергоэффективность на 3%.
Исследование проведено при финансовой поддержке Министерства образования и науки РФ, договор №14.575.21.0133 (RFMEFI57517X0133).
Рис. 6. Результаты эксперимента по применению нейросетевого настройщика.
Библиографический список
1.Tursini, M., Parasiliti, F., & Zhang, D. (2002). Real-time gain tuning of PI controllers for high-performance PMSM drives. IEEE Transactions on Industry Applications, 38(4), 1018– 1026.
2.Pillay, P., & Krishnan, R. (1987). Control characteristics and speed controller design for a high performance permanent magnet synchronous motor drive. In Proceedings of IEEE PESC (pp. 598–606)
3.Zhang, B. T., & Pi, Y. (2012). Robust fractional order proportion-plus-differential controller based on fuzzy inference for permanent magnet synchronous motor. IET Control Theory Applications, 6(6), 829–837.
30