

Учебное пособие 800628
.pdfПри более глубоком анализе данных, полученных при моделировании, было установлено, что наиболее хорошо оценить суммарное удельное сопротивлении осадка и фильтроткани можно исходя из среднего значения модуля скорости изменения положения задвижки, установленной на трубопроводе разрежения в вакуумной системе фильтра, за время переходного процесса после смены задания (20 мин). Графики изменения средних значений модуля скорости изменения положения задвижки, установленной на трубопроводе разрежения, при смене заданий плотности пульпы питания фильтра (эксперимент 1) и разрежения в зоне набора осадка (эксперимент 2) представлены на рис. 4.
По графикам, представленным на рис. 4, видно, что предложенный ранее параметр уменьшает своё значение при увеличении суммарного удельного сопротивления осадка и фильтроткани, вызванного снижением фильтруемости концентрата в пульпе питания фильтра и (или) ростом загрязнённости фильтроткани на дисках фильтра и наоборот. При этом в эксперименте 1 среднее значения модуля скорости изменения положения задвижки, установленной на трубопроводе разрежения, равно 0,0451 %/мин, а в эксперименте 2 - 0,0223 %/мин.
Рис. 4. График среднего значения модуля скорости изменения положения задвижки, установленной на трубопроводе разрежения, при
смене заданий плотности пульпы питания фильтра (1) и разрежения в зоне набора осадка (2)
В настоящем исследовании в результате анализа экспериментальных данных было установлено, что по среднему значению модуля скорости изменения положения задвижки, установленной на трубопроводе разрежения, за время переходного процесса после смены задания плотности пульпы питания фильтра или разрежения в зоне набора осадка можно косвено оценить суммарное удельное сопротивление осадка и фильтроткани. Данный параметр может быть использован при решении задачи экстремального регулирования производительности дискового вакуум-фильтра.
Исследование проведено при финансовой поддержке прикладных научных исследований Министерством образования и науки Российской Федерации, договор № 14.575.21.0133 (RFMEFI57517X0133).
11
Библиографический список
1.Халапян С.Ю., Анпилов А.О. Применение нейросетевых технологий для организации косвенных измерений в системе управления процессом обезвоживания железорудного концентрата // Горный информационно-аналитический бюллетень (научнотехнический журнал). 2017. № 12. С. 195-200.
2.Сафонов Д.Н. Управление процессом разделения технологических пульп медноникелевого производства в современных фильтр-прессах: дис. ... канд. тех. наук: 05.13.06. СПб., 2012. 120 с.
3.Еременко Ю.И., Халапян С.Ю., Анпилов А.О. Автоматизация процесса обезвоживания с использованием косвенных измерений на основе нейросетевой модели дискового вакуум-фильтра // Современные сложные системы управления: материалы Двенадцатой международной научно-практической конференции. Липецк. 2017. С. 220-224.
4.Процессы и оборудование для обезвоживания руд / Ю.С. Гольберт [и др.]. Москва, 1977. 168 с.
5.Еременко Ю.И., Халапян С.Ю., Анпилов А.О. К вопросу повышения эффективности
управления процессом обезвоживания // материалы XV Всероссийской научно-
практической конференции студентов и аспирантов. Старый Оскол. 2018. С. 8-10.
6. Ширяева Е.В. Процессы фильтрования суспензий и обезвоживания осадков на промышленных вакуум-фильтровальных установках непрерывного действия: дис. ... канд. тех. наук: 05.17.08. М., 2011. 130 с.
12

УДК 550.3
УПРАВЛЕНИЕ ПРОЦЕССОМ АЭРОГЕОФИЗИЧЕСКОЙ СЪЕМКИ С ПОМОЩЬЮ СИСТЕМЫ ЭКВАТОР
А.М. Гаракоев, Е.В.Мойланен Институт проблем управления им. В.А. Трапезникова РАН, Россия
Мы описываем возможности комплекса ЭКВАТОР. Бортовое программное обеспечение позволяет пилоту самостоятельно выполнять съемку. Автоматизация процессов управления геофизическим комплексом позволила исключить борт-оператора и штурмана из съемочного процесса. Тем самым удалось увеличить длительность вылета на 25% и производительность на треть.
CONTROLLING THE PROCESS OF AIRBORNE GEOPHYSICAL SURVEY USING THE
EQUATOR SYSTEM.
A. Garakoev, J. Moilanen
V.A. Trapeznikov Institute of Control Sciences of Russian Academy of Sciences
We describe the capabilities of the EQUATOR complex. The on-board software allows the pilot to perform the survey by himself. The automation of geophysical complex control processes allowed to exclude the flight operator and the navigator from the survey process. Thus, it was possible to increase the duration of flight by 25% and productivity by one third.
Введение
Для определения перспектив обнаружения полезных ископаемых в период с октября 2016 г. - по апрель 2017 г. была осуществлена аэрогеофизическая съемка всей территории республики Руанды (26 000 км2). Масштаб съемки составил 1:50 000 (500 метров между профилями, шаг по профилю 4 м). В качестве регистрирующей аппаратуры использовался аэрогеофизический комплекс ЭКВАТОР, включающий технические средства для выполнения аэрогаммаспектрометрических, аэромагнитометрических и аэроэлектроразведочных (по методам МПП и ДИП) измерений. В качестве летательного аппарата-носителя применялся вертолет Eurocopter AS350B3 южноафриканской авиакомпании Skyhorse Aviation. Регулярная камеральная обработка получаемой за съемочный вылет информации выполнялась непосредственно на месте полевых работ сразу по завершению съемочного полета. Таким образом велся оперативный контроль качества полученных данных.
Статья построена следующим образом: сначала приводятся основные характеристики систем ЭКВАТОР и NAVDAT. Далее представлены общая статистика и результаты по работам в Руанде, а также сделаны выводы.
1 Основные характеристики комплекса ЭКВАТОР.
Всостав технических средств аэрокомплекса входят:
аэроэлектроразведочная система ЭКВАТОР;
аэромагнитометрическая система ГТ-МАГ;
аэрогамма-спектрометрическая система GRS410;
средства аэронавигационных измерений;
©Гаракоев А.М., Мойланен Е.В., 2018
13
система регистрации аэрогеофизической информации и управления процессом выполнения полетного задания NAVDAT.
Конструктивно, передающие, измерительные и управляющие элементы аппаратного комплекса размещены на борту летательного аппарата-носителя, на платформе передатчика и в корпусе буксируемой гондолы.
Платформа передатчика буксируется за вертолетом-носителем при помощи тросакабеля, длина которого составляет 70 м. Гондола прикрепляется к трос-кабелю в его средней части на расстоянии 40 м от передающей системы. Трос-кабель присоединяется к штатным буксировочным узлам вертолета-носителя, при этом используются переходные элементы, позволяющие производить расстыковку системы при возникновении нештатных и аварийных ситуаций.
Аэроэлектроразведочная система, входящая в состав комплекса ЭКВАТОР, является одним из представителей класса буксируемых вертолетных индуктивных электромагнитных систем, реализующих метод переходных процессов [1]. Передатчик системы ЭКВАТОР выполнен в виде четырехвитковой петли диаметром 7,5 м. Сигнал возбуждения представляет собой повторяющиеся разнополярные импульсы длительностью 1,9 мс в форме полусинуса. Базовая частота 77 Гц. Амплитуда момента — 100000 А·м2.
Трехкомпонентный приемник располагается в специальной гондоле, прикрепленной к буксировочному тросу примерно в 40 метрах от передатчика. В системе ЭКВАТОР реализованы алгоритмы относительного позиционирования передатчика и приемника [2], позволяющие определить геометрию установки с точностью не хуже 10 см. Привязка полученных данных в географической системе координат осуществлялась при помощи спутниковой навигационной системы, работающей в дифференциальном режиме. Высота полета над поверхностью Земли контролировалась установленным на платформе передатчика радиовысотомером. С помощью системы NAVDAT удалось добиться высоких производственных показателей. Её характеристики приведены ниже.
2 Система NAVDAT.
Программа NAVDAT предназначена для работы на IBM/PC совместимом бортовом компьютере в целях вычислительного обеспечения аэросъемочного процесса.
Составляющими частями съемочного процесса, обслуживаемыми программой "NavDat", можно считать следующие:
•Навигационное обеспечение работ. Основываясь на возможностях современной технологии спутниковой навигации, программа "NavDat" осуществляет регистрацию навигационной информации в реальном времени, выполняет управление проводкой с помощью пилотского индикатора, позволяет решать широкий круг штурманских задач в автоматическом режиме, а также интерактивное управление полетным заданием [3].
•Взаимодействие с аппаратными средствами аэрогеофизического бортового комплекса. Программа, используя интерфейсы бортовой ЭВМ, осуществляет обмен данными и командами со всеми приборами, обеспечивая синхронность регистрации полученной информации.
•Запись данных. Данные записываются в виде файлов жесткого диска бортовой ЭВМ.
•Пользовательский интерфейс (Рис. 1). Программа в полной мере предоставляет пользователю возможности контроля и управления взаимодействием с аппаратными средствами.
Основные возможности программы организованы таким образом, что при организации аэросъемочного процесса удалось исключить необходимость использования штурманасъемщика и борт-оператора, оставляя на борту только одного пилота, возложив на него в основном функции контроля. Разработчики программы старались так организовать ее работу, чтобы никакие ошибки в работе бортоператора не могли привести к фатальной
14

потере или искажению аэрогеофизической информации.
Рис. 2. Кабина пилота вертолета AS350B3. Пользовательский интерфейс показан стрелкой.
Все устройства, подключаемые к программе "NavDat", как и сама система "NavDat", имеют свой флаг работоспособности (Рис. 2). Все эти флаги могут контролироваться при помощи соответствующего приложения ’Статус’. Каждый флаг отображается при помощи индикатора, имеющего серый цвет в том случае, когда устройство работает корректно. В противном случае индикатор красного цвета. Все индикаторы кофигурируются автоматически при запуске "NavDat".
Рис. 3. Панель состояния.
Если индикатор остается красным более минуты, съемка должна быть прекращена до устранения причин.
Значения флагов определены следующим образом
•sys - Загорается красным, если случилась ошибка записи, данные не удается записать или осталось мало свободного места на диске (на 10 часов или менее).
•gtmag - Загорается красным, если нет синхронизации с ГНСС-приемником (отсутствует сигнал PPS), недостаточно видимых спутников, низкая амплитуда сигнала датчика, низкий или чрезвычайно высокий ток потребления датчика или отсутствуют данные как таковые.
•gps - Загорается красным, если нет данных или счисления координат в соответствующем ГНСС-приемнике.
•spec - Загорается красным, если нет сигнала или если случилась ошибка потока данных.
•equator - Загорается красным, если нет сигнала, возбуждение выключено, в случае
зашкала какого-либо АЦП или если случилась ошибка потока данных.
4 Алгоритм управления летательным аппаратом при аэросъемке
Для управления летательным аппаратом на этапе проводки по маршрутам используется специальный индикатор типа «стрелка», который входит в программный комплекс NAVDAT. Данный индикатор информирует пилота об отклонениях летательного аппарата от заданного маршрута проводки.
15
Основным параметром для построения алгоритма управления при проводке выбирается боковое уклонение x, поскольку именно эта величина служит критерием оценки качества выполнения съемки. Величина, подаваемая на указатель пилота, должна обеспечивать возможность минимизации уклонения x. За основу взят алгоритм классического ПИД-регулятора [4]:
j |
|
|
(1 |
|
u j = kp xj + ki xn + kd xj |
xj 1 |
, |
||
) |
||||
n=0 |
|
|
||
|
|
|
где j – номер шага согласно отсчетам спутниковой навигационной системы, kp, ki и kd – коэффициенты усиления для пропорциональной, интегральной и дифференциальной составляющих, uj – величина, которая подается на индикатор пилота.
Для реализации в бортовом программном обеспечении соотношение (1) записывается в рекуррентной форме:
u j = u j 1 + kp xj |
xj 1 + ki xj + kd xj |
2xj 1 |
+ xj 2 |
, |
(2 |
|
) |
||||||
|
|
|
|
|
Данный алгоритм имеет определенный физический смысл. Величина uj представляет собой умноженное на некоторый коэффициент K прогнозируемое боковое уклонение с учетом текущих значений скорости и ускорения, длина прогнозируемой траектории при этом определяется коэффициентами kp и kd. Наличие интегрального члена регулятора, помимо прочего, обеспечивает сглаживание координат прогнозируемого положения. Дело в том, что в формулу (2) входит боковое уклонение x, вычисленное с учетом измеренных спутниковой навигационной системой координат, а также его первая и вторая разности. Погрешность измерения координат приводит к появлению шумовой составляющей величины uj, влияние которой уменьшается при интегрировании.
Общий коэффициент пропорциональности K можно интерпретировать как
Тогда uj является тангенсом угла между направлением на прогнозируемую точку и направлением на точку-аттрактор, находящуюся на линии программной траектории,
отнесенную на расстояние ΔL вперед по ходу движения.
При использовании формы (2) на большом удалении от маршрута индикатор будет «на упоре», что не пригодно для работы, так как пилоту нужно знать направление сближения с маршрутом. Поэтому было решено на индикатор подавать сигнал, пропорциональный не
тангенсу угла, а самому углу. В этом случае при очень большом удалении D ΔL индикатор будет «вести» пилота по направлению, примерно ортогональному маршруту, а при сближении будет плавно выводить на маршрут.
Для ограничения времени влияния интегрального члена регулятора был применен логарифмический фильтр
uj = 1 λ uj 1 + λarctan kp xj |
xj 1 +ki xj +kd xj |
2xj 1 |
+ xj 2 |
, |
(3 |
|
) |
||||||
|
|
|
|
|
где λ 1 – коэффициент логарифмического фильтра. Очевидно, что при малом боковом отклонении это соотношение эквивалентно формуле (2) с точностью до
коэффициента λ .
Такой алгоритм при адекватном подборе коэффициентов обеспечивает эффективное сближение с программной линией. Коэффициенты соотношения (3) вычисляются как функции следующих параметров:
–время реакции пилота;
–съемочная скорость летательного аппарата;
–рабочий крен при маневре;
16
– длина ΔL выноса аттрактора;
– масштаб съемки.
4 Выводы.
Были выполнены масштабные геофизические работы всей территории республики Руанда (26 000 км2). Автоматизация процессов управления геофизическим комплексом ЭКВАТОР (электроразведка, магниторазведка, спектрометрия) и навигации вертолета AS350-B3 позволила исключить борт-оператора и штурмана из съемочного процесса. Тем самым удалось увеличить длительность вылета на 25% и производительность на треть.
Библиографический список
1.Волковицкий А.К., Каршаков Е.В., Мойланен Е.В., Новая вертолетная аэроэлектроразведочная система ЭКВАТОР для метода АМПП. – Приборы и системы разведочной геофизики, 2010, 2(32), 9-11.
2.Karshakov E., Volkovitsky A., Tkhorenko M., Receiver Positioning by Means of EM Field Measurements. – Papers of the 13th SAGA Biennial & 6th International AEM Conference. Mpumalanga, South Africa, 2013, 4 p.
3.Каршаков Е.В., Особенности алгоритмов управления летательным аппаратом при аэросъемке. - Проблемы управления, 2012. 3(128), С. 71-76.
4.O'Dwyer A. PID compensation of time delayed processes 1998–2002: a survey // Proc. of the American Control Conference. – Denver, Colorado, 2003. – P. 1494–1499.
17

УДК 004.8:621.33
АДАПТИВНОЕ НЕЙРОСЕТЕВОЕ УПРАВЛЕНИЕ БАЛАНСИРУЮЩИМ РОБОТОМ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ
А.И. Глущенко, В.А. Петров, Ласточкин К.А. СТИ НИТУ МИСИС
В работе рассматривается задача управления балансирующим роботом в реальном масштабе времени. В качестве регулятора используется искусственная нейронная сеть, обучающаяся оперативно. Для определения моментов, в которые целесообразно производить обучение сети, разработана система правил и алгоритм, определяющий знаки коррекции весов нейронной сети.
ADAPTIVE NEURAL NETWORK CONTROL OF BALANCING ROBOT IN REALTIME MODE
A.I. Glushchenko, V.A.Petrov, K.A. Lastochkin
STI NUST “MISIS”
The paper deals with the task of controlling a balancing robot in real time. As a regulator, an artificial neural network is used, which is trained operatively. To determine the moments in which it is advisable to train the network, a system of rules and an algorithm that determines the signs of the correction of the weights of the neural network are developed.
1.Введение.
Вданной работе решается задача управления балансирующим двухколесным роботом на платформе LEGO EV3 – физической реализации перевернутого маятника на тележке. Различные схемы управления перевернутым маятником разработаны достаточно давно [1-4]. Тем не менее, задача управления таким объектом к настоящему времени не решена в полном объеме. Повышение эффективности управления балансирующим роботом позволило бы применить его при создании транспортных средств для людей с ограниченными возможностями; роботов-погрузчиков для складского хозяйства; планетоходов для космической отрасли [5].
Вданной работе предлагается скомбинировать искусственную нейронную сеть (НС), выполняющую роль регулятора, с базой условий и ограничений на оперативное обучение используемой сети. Подобное сочетание интеллектуальных подходов позволит получить адаптивный регулятор, позволяющий улучшить качество управление объектом.
2.Описание объекта управления.
Вкачестве объекта управления (ОУ) был выбран реальный балансирующий робот, реализованный на платформе LEGO EV3. Его общий вид и кинематическая схема с видом сбоку и сверху – представлены на Рис. 1.
© Глущенко А.И., Петров В.А., Ласточкин К.А., 2018
18
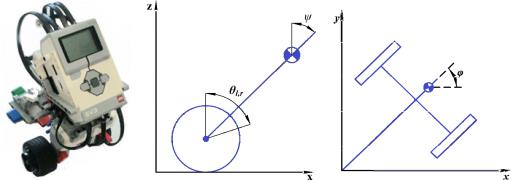
Рис. 1. Общий вид ОУ и его кинематическая схема с видом сбоку и сверху.
Рассматриваемый объект управления описывается семью координатами в пространстве координат состояний – θ (theta) – средний угол (между углами для левого θl и θr правого колес) поворота колёс (θ = 0.5(θl+θr)), θ’ (theta dot) – скорость поворота колёс, θint (theta int) – интеграл от среднего угла поворота колёс, ψ (psi) – угол отклонения от нормали, ψ’ (psi dot) – скорость отклонения от нормали, φ (phi) – угол поворота относительно нормали, φ’ (phi dot) – скорость поворота относительно нормали. Задача управления балансирующим роботом заключается в единовременном управлении всеми семью координатами состояния. При этом управляющими воздействиями для данного ОУ (ввиду наличия всего двух исполнительных механизмов) являются напряжения питания для левого и правого электродвигателей (u = (ul, ur)).
Конструирование нейросетевого регулятора выполнялось в программной среде MatLab Simulink. При проведении экспериментов на реальном объекте подключение микропроцессора LEGO EV3 к MatLab Simulink осуществлялось с помощью Ethernet соединения. Дискретность работы (Ts) EV3 составляет 0.004 с. Такая же дискретность установлена для расчетов при моделировании в Matlab.
3. Синтез нейросетевого регулятора
Первым этапом синтеза нейросетевого регулятора является выбор структуры нейронной сети, а также определение входных и выходных величин.
Как отмечалось ранее, балансирующий робот является многосвязным ОУ и для своей нормальной работы требует одновременного управления всеми семью координатами состояния. В классической теории автоматического управления регулятор для такого рода объектов строится в форме некоторой матрицы коэффициентов для составляющих отрицательной обратной связи системы. Такая матрица коэффициентов называется линейно квадратичным регулятором (LQR) [6]. Данный регулятор принимает на вход вектор рассогласований по координатам системы E = [eθint eθ eψ eθ’ eψ’ eφ eφ’]T, а его выходом является управляющие воздействие. При соответствующей настройке LQR обеспечивает оптимальное управление объектом по всем координатам при условии постоянства параметров ОУ.
Расчет матричного коэффициента усиления LQR-регулятора, элементы которого являются весами выходного слоя, производится на основании модели ОУ в пространстве координат состояний [7], минимизируя квадратичный критерий оптимальности (1).
|
|
J 0.5 (ETQE uT Ru)dt min, |
(1) |
0 |
|
где Q(7,7) и R(2,2) – положительно определенные единичные матрицы.
Структура синтезируемой нейронной сети была построена таким образом, чтобы математические операции на ее выходном слое повторяли бы математические операции LQR
19
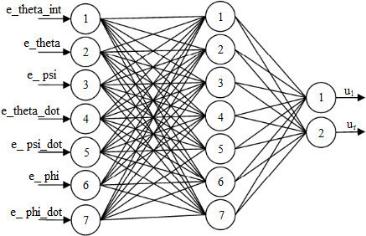
регулятора. На вход нейронной сети приходит вектор рассогласований E из семи элементов, исходя из этого количество входных нейронов принято равным семи. На скрытом слое тоже необходимо семь нейронов – для полной передачи вектора рассогласований E на выходной слой. Количество нейронов на выходном слое соответствует количеству управляющих воздействий в выбранной системе управления и равно двум. На скрытом, и на выходном слое используются линейные функции активации, с целью повторения математических операций LQR регулятора. Структура выбранной нейронной сети представлена на Рис. 2.
Следующим шагом после выбора структуры нейронной сети, определения количества её входов и выходов является обучение нейронной сети. Существуют разные подходы к его реализации [8]. И в первую очередь, это автономное и оперативное обучение. Целью первого из них является обеспечение работоспособности сети в момент ее запуска для управления балансирующим роботом. Наилучшим вариантом в данном случае представляется использование работоспособных параметров, найденных для классического регулятора, например, LQR.
Рис. 2. Структура выбранной нейросети.
В данной работе веса были искусственно заданы таким образом, что элементы весовой матрицы выходного слоя LW(7,2) совпадают с соответствующими коэффициентами усиления матричного коэффициента LQR регулятора, а матрица весов скрытого слоя IW(7,7) является единичной. Ввиду линейных функций активаций скрытого и выходного слоя необходимость в смещениях отсутствует.
Вычисленная матрица весов выходного слоя LW имеет вид:
0.644 |
1.242 |
59.38 |
1.391 |
7.1 |
0.677 |
0.179 |
LW |
|
|
|
|
|
. |
0.644 |
1.242 |
59.38 |
1.391 |
7.1 |
-0.677 |
-0.179 |
Следующим шагом, ввиду нестационарности рассматриваемого объекта управления, является оперативное обучение НС.
4. Оперативное обучение нейронной сети.
Оперативное обучение разработанной нейронной сети производится согласно алгоритму обратного распространения ошибки, как одному из наиболее зарекомендовавших себя подходов [8]. При этом в качестве ошибки, пропорционально которой производится коррекция весовых коэффициентов, была выбрана ошибка, вычисляемая по методу наименьших квадратов (МНК). Ошибка представляет собой ½ от суммы квадратов расстояний от текущих значений координат состояний объекта до требуемых значений (2). Для её вычисления были выбраны ошибки по координатам θ’, ψ’, φ’, так как с датчиков реального объекта (гироскопа и двух энкодеров) напрямую снимаются именно эти координаты.
20