

Учебное пособие 800628
.pdfустойчивой, в данном случае не происходит обеспечение устойчивости относительно регулируемой величины. Устранить данную проблему можно: установив апериодические фильтры на выходы моделей статора; установив апериодический фильтр на выход модели статора и ротора (рисунок 2); заменив интегратор апериодическим звеном (рисунок 3); охватив интегратор отрицательной обратной связью и введя ПИ-регулятор, который обеспечит нечувствительность идентификатора к смещениям нулей сигналов с датчиков тока и напряжения и будет работать с максимальной глубиной подавления помех (рисунок 4); использованием модели на основании ЭДС ротора, являющейся в неподвижной системе координат производной от потокосцепления ротора по времени (рисунок 5).
Рисунок 1 – Модель адаптивного наблюдателя скорости по потокосцеплению ротора
Рисунок 2 – Модель адаптивного наблюдателя с фильтрами на выходе модели статора
иротора
111
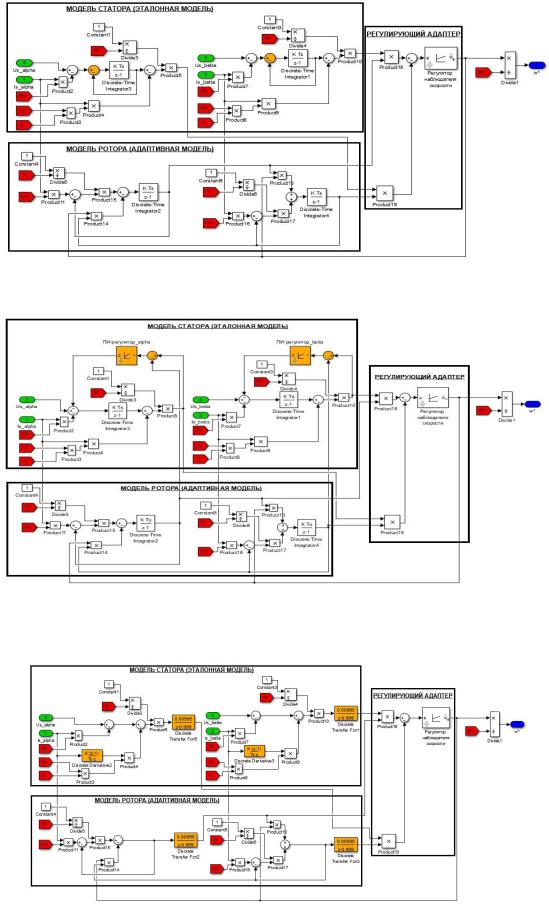
Рисунок 3 – Модель адаптивного наблюдателя с апериодическим звеном
Рисунок 4 – Модель адаптивного наблюдателя с апериодическим звеном и ПИрегулятором
Рисунок 5 – Модель адаптивного наблюдателя по ЭДС
112
В последнее время наблюдается тенденция к использованию на механизмах перемещения системы с прямым управлением моментом, внедрение которой позволяет добиться хороших показателей по многим позициям [1, 2].
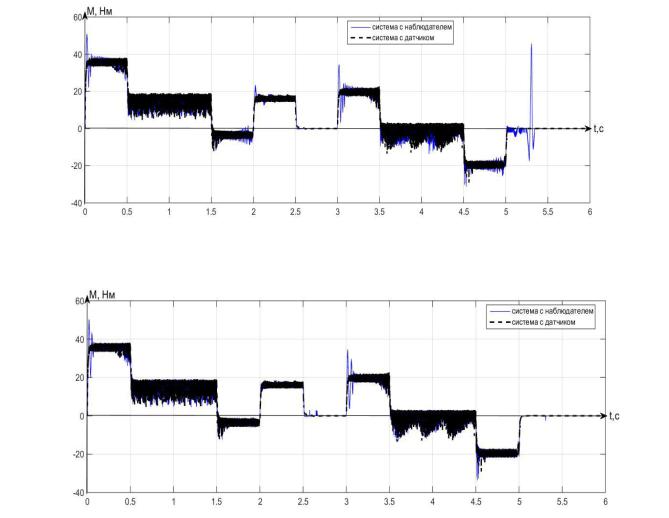
Для исследования в программе MATLAB Simulink была собрана классическая модель системы с прямым управлением моментом [3], дополненная рассмотренными адаптивными наблюдателями. Результаты моделирования переходного процесса электромагнитного момента с разными видами наблюдателей [4], совмещенные с результатами моделированием системы с датчиками представлены на рисунках 6-10.
Анализ графиков показывает, что добавление фильтров на выходы моделей статора и ротора позволило незначительно уменьшить колебания, но не привело к их полному исчезновению. Устойчивая работа алгоритма идентификации будет только в установившихся режимах. При замене интегратора апериодическим звеном при работе на низких частотах проявляются амплитудно-фазовые искажения.
Рисунок 6 – Система с адаптивным наблюдателем по потокосцеплению ротора
Рисунок 7 – Система с адаптивным наблюдателем по потокосцеплению ротора и апериодическими фильтрами на выходах моделей статора и ротора
113
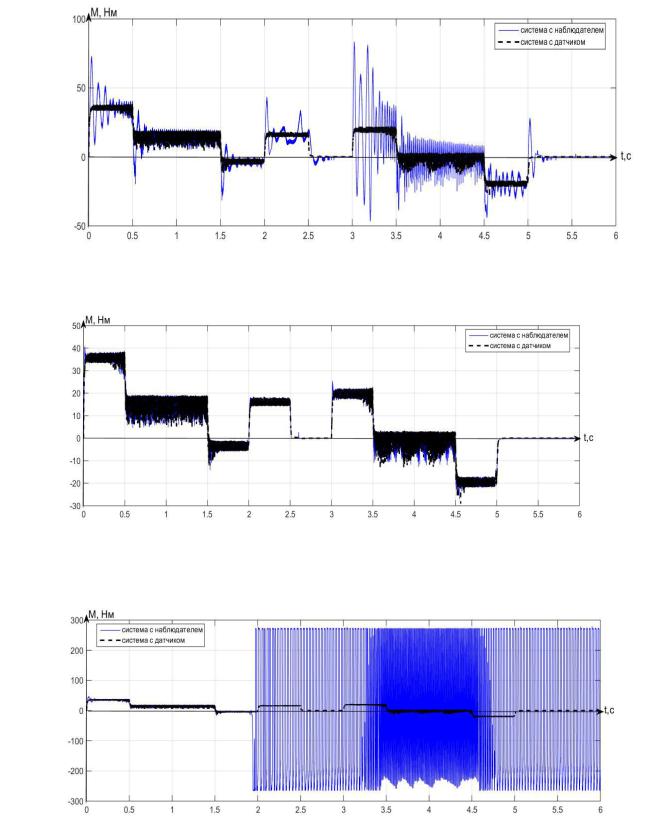
Рисунок 8 – Система с адаптивным наблюдателем по потокосцеплению ротора и апериодическим звеном
Рисунок 9 – Система с адаптивным наблюдателем по потокосцеплению ротора, апериодическим звеном и ПИ-регулятором
Рисунок 10 – Система с адаптивным наблюдателем по ЭДС
При введении в отрицательную обратную связь ПИ-регулятора удалось добиться нечувствительности наблюдателя к сдвигу нулей сигналов с датчиков тока и напряжения и достичь стабильности работы с максимальной глубиной подавления помех. Использование
114
адаптивного наблюдателя по ЭДС из-за нелинейности усиления наблюдателя, при работе на низких скоростях, приводит к недостоверности определения скорости, что говорит о непригодности данного типа наблюдателя для наблюдения за скоростью при малых и нулевых значениях.
Библиографический список
1.Синюкова, Т.В. Метод ускорения поискового алгоритма для прямого управления моментом [Текст] / Т.В. Синюкова, П.Н. Левин // Приборы и системы. Управление, контроль, диагностика. – 2013. – №12. С. 60-63.
2.Синюков, А.В. Моделирование системы прямого управления моментом асинхронного двигателя [Текст] / А.В. Синюков, Т.В. Синюкова // Сборник тезисов докладов научной конференции студентов и аспирантов Липецкого государственного технического университета [Текст]: В 2-х ч. Ч.2. – Липецк: Изд-во Позитив-Л, 2016. С. 60-62
3.Соколовский, Г.Г. Электроприводы переменного тока с частотным регулированием [Текст]: учеб. пособие для студ. высш. учеб. заведений / Г.Г. Соколовский. – М.: Издательский центр «Академия», 2006. – 272с.
4.Калачев, Ю.Н. Наблюдатели состояния в векторном электроприводе (записки дилетанта) [Текст] / Ю.Н. Калачев. – М., 2015. – 60 с.
.
115

УДК 681.518.2:007
ПРИНЦИП РЕАЛИЗАЦИИ МНОГОАЛЬТЕРНАТИВНОГО АГЕНТА КАК ИНСТРУМЕНТ ПРИНЯТИЯ УПРАВЛЯЮЩИХ РЕШЕНИЙ
М.А. Цуканов Старооскольский технологический институт им. А.А. Угарова (филиал) НИТУ
«МИСиС» В статье рассматривается сложность задачи принятия решений. Предлагается
мультиагентный подход для реализации систем поддержки принятия решений. Рассматриваются традиционные свойства агентов, предлагается их дополнение на основе принципа многоальтернативности.
THE MULTI-ALTERNATIVEITY AGENT IMPLEMENTATION PRINCIPLE AS A TOOL OF CONTROL DECISION MAKING
М.А. Tsukanov
Oskol institute of technology branch of the “National University of Science and Technology “MISiS”
Тhe decision making problem complexity is considered in the article. A multi-agent approach is proposed for the implementation of decision support systems. The traditional properties of agents are considered, their addition is suggested on the basis of principle.
Увеличение объема информации, которую необходимо обрабатывать в процессе принятия управленческих решений, возрастание сложности решаемых задач в условиях необходимости учета большого числа взаимосвязанных факторов и высокой динамики процессов, актуализируют применение систем поддержки принятия (СППР). Различные определения данного термина обобщил Э.А. Трахтенгерц [4]; СППР - это система, выполняющая следующие функции:
1)оценка обстановки (ситуаций), выбор критериев и оценка их относительной важности;
2)генерации возможных решений или сценариев действий;
3)оценка сценариев, решений, действий, выбор наилучших из них;
4)обеспечение информационного обмена и согласование групповых решений;
5)моделирование принимаемых решений;
6)динамический анализ возможных последствий принимаемых решений;
7)сбор данных о результатах реализации принятых решений и оценка этих результатов.
Современная мировая практика совершенствования управления в таких системах предлагает использование мультиагентных технологий [1].
Мультиагентные технологии (МАТ) - направление искусственного интеллекта, основанное на взаимодействии нескольких интеллектуальных агентов в распределенных системах [3].
©Цуканов М.А., 2018
116
Применение МАТ - один из путей создания новой методологии управления, способной приблизить нас к адекватному описанию окружающего мира, базирующийся на создании мультиагентных систем (МАС), получивших стремительное развитие в последнее десятилетие на стыке объектно-ориентированного программирования, систем искусственного интеллекта и систем телекоммуникаций. Ключевым элементом этих систем является агент, способный воспринимать ситуацию, принимать решения и коммуницировать с другими агентами. [1].
Основные причины, обусловливающие особую актуальность МАС в настоящее время, во-первых, это сложность современных систем и организаций, которая достигает такого уровня, что централизованное управление в них становится неэффективным из-за наличия огромных потоков информации, когда слишком много времени тратится на ее передачу в центр и принятие им решений. Сами компьютерные системы также становятся все сложнее и включают ряд подсистем различной природы, обладающих различными функциональными характеристиками и взаимодействующих с различными специалистами, удаленными друг от друга. Кроме того, с ростом сложности падает надежность систем, и все труднее сформулировать их адекватную целевую функцию.
Во-вторых, сами решаемые задачи или разрабатываемые системы подчас неоднородны
ираспределены:
•в пространстве;
•в функциональном плане.
Они возникли и развиваются в ходе технической эволюции (а системы, возникшие эволюционным путем, не связаны с централизованным управлением).
В-третьих, понятие открытой системы означает, что у нее имеются развитые возможности и средства адаптации к изменениям среды, в том числе путем модификации своей структуры и параметров [83].
Решение задачи одним агентом на основе инженерии знаний представляет собой точку зрения классического ИИ, согласно которой агент (например, интеллектуальная система), обладая глобальным видением проблемы, имеет все необходимые способности, знания и ресурсы для ее решения.
В идеологии МАС предполагается, что отдельный агент может иметь лишь частичное представление об общей задаче и способен решить лишь некоторую ее подзадачу. Поэтому для решения сколько-нибудь сложной проблемы, как правило, требуется взаимодействие агентов. Этот социальный (коллективный) аспект решения задач – одна из фундаментальных характеристик концептуальной новизны передовых компьютерных технологий и искусственных (виртуальных) организаций, строящихся как МАС.
Специалистами выделен ряд свойств, присущих агентам как категории информационных технологий:
1.Способность реагирования. Определяет возможность агентов своевременно реагировать на действия внешней среды. Агенты действуют без любых внешних или внутренних консультаций [8].
2.Автономность. Часто упоминается как наиболее важное свойство программных агентов, которое сложно определить формально [7].
117
3.Программность. Программный агент является, прежде всего, компьютерной программой. Хотя в агентах можно выделить свойства аппаратные и человеческие, тем не менее, дать им четкое определение очень сложно.
4.Рациональность поведения. Если агента рассматривают как объект с элементами интеллектуальной системы такими, как цель намерения, желания и т.п., то имеют в виду интеллектуального агента [6].
5.Рассудительность. Это свойство используется для того, чтобы описать способность агентов к мышлению. Проявляется в случае, когда агент, используя знания и мышление, старается определить, что ему следует начать делать (или делать ли вообще).
6.Коммуникабельность. Агенты могут игнорировать друг друга, работать вместе или конкурировать между собой. Наиболее часто имеет место кооперация (или координация действий) агентов, если агенты объединяют свои усилия для достижения общей цели.
Координация очень тесно связана с рациональным поведением агентов, поскольку при координации каждому отдельному агенту необходимо знать цели и намерения других агентов.
Для кооперации агентов должны быть соответствующие координационные стратегии, коллективное обучение, иерархическая организация. Межагентные связи (коммуникация) являются очень важными для кооперации. В общем случае, коммуникация - это абстрактный уровень, который основан на алгоритмах, языках и протоколах взаимодействия.
7.Продолжительность функционирования. Определяет то, что агент должен функционировать на протяжении длительного периода времени.
Процесс принятия решений в любой области деятельности, по сути, представляет последовательную оценку вариантов альтернативных вариантов решения и оценку их результата.
Такой принцип присущ биологическим системам, в том числе и человеческому мозгу. Однако, в теории и практике управления на сегодняшний день процесс принятия решений строится на основе детерминированной стратегии. Оценка альтернативных решений производиться человеком на этапе проектирования. Из множества альтернативных алгоритмов решения задач выбирается один, показавший лучший результат на тестовой
выборке или в результате имитационного моделирования.
Такой подход достаточно эффективен на сегодняшний день, но не свободен от недостатков:
нет гарантии того, что тестовая выборка будет адекватной описывать реальную систему на долгосрочном временном промежутке;
имитационная модель с учетом определенных допущений и погрешностей, значение которых может быть критическим в условиях реальной системы.
В своей работе я предлагаю дополнить традиционные свойства агента принципом многоальтернативности предложенного С. Л. Подвальным [3].
Структура многоальтернативного агента приведена рис. 1 и включает в себя модуль механизма переключения управляющий переходом к одному из алгоритмов управления агентом на основе анализа состояния внешней среды, к которой необходима адаптация.
118
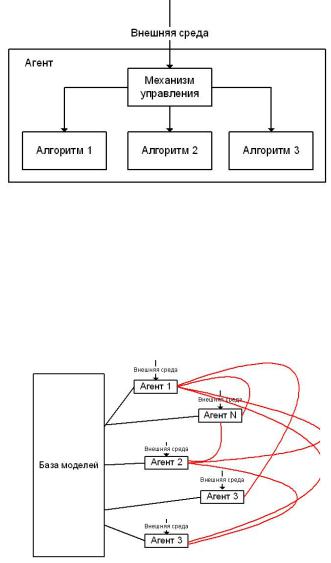
Рис. 1. Структура многоальтернативного агента Рассматривая задачу принятия управленческих решений с использованием СППР на
основе мультиагентных технологий необходимо разрабатывать несколько независимых агентов, каждый из которых будет отвечать за решение своей подзадачи в рамках глобального решения. В таком случае взаимодействие агентов дополненных многоальтернативным принципом будет формировать управляющее решение в виде фреймов-сценариев, которые будут сохраняться в базе моделей поведения (рис. 2).
Рис.2. Взаимодействие многоальтернативных агентов в процессе принятия решения Приведенная модификация агента позволит повысить эффективность при
проектировании систем поддержки принятия решений, основанных на многоагентом принципе. Однако практическая реализация таких агентов потребует увеличенного объема памяти по сравнению с обычными агентами.
Библиографический список
1.Бодянский Е. В., Кучеренко В. Е., Кучеренко Е. И. Гибридные нейро-фаззи модели и мультиагентные технологии в сложных системах // Днепропетровск, - Системные технологии, 2008. – 357 с.
2.Городецкий В.И. Многоагентные системы: основные свойства и модели координации поведения. Информационные технологии и вычислительные системы, № 1, с.22-34, 1998.
3.Подвальный С.Л. Многоальтернативные системы: обзор и классификация // Системы управления и информационные технологии. 2012. Т. 48. № 2. С. 4-13.
119
4.Трахтенгерц Э. А. Компьютерные системы поддержки принятия управленческих решений \\ статьи международной конференции по проблемам управления. Москва - 2003.
5.Чекинов Г.П., Чекинов С.Г. Применение технологии многоагентных систем для интеллектуальной поддержки принятия решения (ИППР). М; - электронный научный журнал «Системотехника» № 1, 2003 г.
6.Dean T, Alien J, Aloiffionos Y. Artificial intelligence - theory and practice. - Benjamin/Cummings, 1995. - 273 p.
7.Jennings N.R, Sycara K, Wooldridge M. A Roadmap of Agent Research and Development // Autonomous Agents and Multi-Agent Systems Journal. -Boston: Kluwer Academic Publishers , 1998. - 1, Is. 1. - P. 7-38.
8.Nwana H.S. Software agents: an overview // Knowledge Engineering Review / Cambridge University Press. - 1996. - 11.- No 3. - P. 1-40.
120