

Учебное пособие 800628
.pdfg |
( j) (t) |
G |
, j |
0,3; |
|
|
i |
ij |
|
|
|
|
|
|
|
|
|
|
& |
|
|
~ |
|
|
|
|
|
|
|
& |
|
~ |
|
|
|
|
|
|
||
Hij |
Hij , |
|
|
Cij |
Cij , |
|
, j 1,n; |
(3) |
||||||||||||||||||||
Hij |
Hij , |
|
Cij |
Cij |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
& |
|
~ |
|
|
( j) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gi |
Gi , |
|
|
, |
Nij |
, |
j 0,1,i 1, n . |
|
||||||||||||||||||
|
|
Gi |
|
Gi |
i |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ставится задача синтеза робастной обратной связи, обеспечивающей в замкнутой системе экспоненциальную стабилизацию ошибок слежения e1 q1 g Rn инвариантно по отношению к имеющимся неопределенностям:
lim e (t) 0. |
(4) |
t 1 |
|
3. Базовый закон разрывного управления
Для решения поставленной задачи предлагается использовать блочный подход. В сделанных предположениях о дифференцируемости матриц механической подсистемы и внешних воздействий, выполним невырожденные замены переменных
e1 q1 g, e2 q2 K1e1 |
& |
, |
e3 H |
1 |
( w2 ) K2e2 , |
(5) |
|||
g |
|
||||||||
K j diag (k ji ) , j |
1, 2, k2i |
k1i |
0, i |
1, n |
; |
(6) |
|||
w2 C(q1, q2 )q2 G(q1) H (K12e1 g&&) ,
и представим систему (1)–(2) в виде СБФ управляемости и наблюдаемости относительно ошибок слежения:
|
e1 |
K1e1 e2 , |
e2 |
(K2 |
K1)e2 e3, |
(7) |
||||
|
& |
|
|
& |
|
|
|
|
|
|
& |
& 1 |
( w2 ) H |
1 |
& |
& |
& |
H |
1 |
(w Bu), |
|
e3 |
H |
|
( |
w2 ) K2e2 |
|
|
||||
где w AHe3 w31 Hw32 ,
|
|
|
& |
& |
|
(C AH)e3 |
|
w31 (AC AHK1 D C CK1 |
HK1)K1e1 AHK2e2 |
|
|||||
|
|
& & |
& |
&& |
& |
|
|
(AC D C)g (AH C H)g |
A AG G, |
|
|
||||
3 |
& 1 |
|
2 2 |
|
& |
& 1 |
&&& |
w32 K1 e1 (H HK2 K1 K2 K2 K1 |
|
|
|||||
AC D C CK2 )e2 (K2 H H )e3 g. |
|||||||
В системе (7) вектор состояния составляют смешанные переменные (5), а элементы смешанного вектора wn 1 col(w1,..., wn ) трактуются как ограниченные параметрические и внешние возмущения. Диапазоны их изменения определяются с учетом (3) в виде
wi (t) Wi t 0,i 1,n.
В отличие от исходной системы (1)–(2) в СБФ (7) возмущения согласованы, т.е. принадлежат пространству управления, их действие можно подавить с помощью разрывного управления
u K3signe3 , K3 |
diag(k3i ), k3i |
0 , i |
1,n |
. |
(8) |
Замкнутая система (7)–(8) принимает вид
161

e&1 K1e1 e2 ,
e&2 (K2 K1)e2 e3,
e&3 H 1(w BK3signe3 ).
Учитывая, что матрица H 1(q1) положительно определенная, при выполнении достаточных условий [1]
e3ie&3i 0 bik3i Wi , i 1, n
за конечное время t 0 возникнет скользящий режим в виртуальном пространстве смешанных переменных (5) на многообразии e3 0 . При t t поведение замкнутой системы (7)–(8) описывается следующей логической цепочкой
e3(t) 0 e2 (t) 0 e1(t) 0 q1(t) g(t) , |
(9) |
что и решает поставленную задачу слежения (4) при условии, что текущие значения e3(t) известны.
4.Синтез наблюдателя смешанных переменных пониженной размерности
Вотличие от исходной системы (1)–(2) система (7) наблюдаема относительно измеряемых ошибок слежения e1(t) [3, 6]. Для информационного обеспечения базового
закона разрывного управления (8) и оценивание e3(t) предлагается построить наблюдатель
состояния как реплику системы (7). При таком подходе задачи управления и наблюдения решаются относительно одних и тех же переменных нового координатного базиса (5), что не требует выполнения обратных замен переменных в реальном времени, а структура регулятора существенно упрощается. Для реализации данного подхода достаточно измерений только ошибок слежения.
Заметим, что в системе (7) матрица H 1(q1) содержит неопределенные параметры, поэтому получить текущие оценки возмущений w(t) без расширения пространства
состояний не представляется возможным. Как следствие, нет возможности сформировать комбинированное управление, компенсирующее действие внешних возмущений.
Для реализации базового закона разрывного управления (8) мы должны получить оценку смешанной переменной e3(t) (5). Один из способов состоит в построении наблюдателя
состояния на основе полной или укороченной за счет третьего блока СБФ (7) и реализации метода разделения движений в пространстве ошибок наблюдения с помощью разрывных корректирующих воздействий [4, 6, 7] или их непрерывных аналогов в виде кусочнолинейных [5] или S-образных нелинейных сигма-функций [9]. При построении наблюдателя пониженного порядка на основе первых двух блоков СБФ (7) переменные e3(t) трактуются
как внешние ограниченные возмущения, оценки которых можно получить с помощью корректирующих воздействий наблюдателя без использования их динамических моделей.
162

Вданном разделе представлен оригинальный метод синтеза наблюдателя с большими коэффициентами пониженного порядка с более простой настройкой параметров, в котором реализуется принцип полной декомпозиции.
Вкачестве основы для построения этого наблюдателя используются первые два блока
СБФ (7), выходными (измеряемыми) переменными являются ошибки слежения e1(t) , а смешанные переменные e3(t) col(e31,...,e3n ) трактуются как внешние, гладкие возмущения. Диапазоны их изменения
|
|
|
|
~ |
|
|
|
|
e3i (t) |
Ei , |
& |
(t) |
t 0, i 1,n |
(10) |
|||
e3i |
Ei |
|||||||
определяются с учетом (3), (5), (8) при выбранных параметрах обратной связи (6).
Основу разработанного подхода составляет принцип построения наблюдателя Луенбергера пониженного порядка для линейных систем [11], который был распространен на линейные и нелинейные системы при действии внешних возмущений [2, 3, 7]. Введем невырожденные замены переменных состояния
s |
e |
Rn , s |
2 |
L |
e |
e |
2 |
Rn , |
(11) |
1 |
1 |
|
2 |
1 |
|
|
|
где элементы диагональной матрицы L2 diag(l2i ),l2i 0 , i 1,n будут определены ниже. С учетом (11) первые два блока СБФ (7) примут вид
|
s1 (L2 K1)s1 s2 , |
(12) |
|
& |
|
s2 L2 (L2 K1)s1 (L2 K2 K1)e2 e3 . |
|
|
& |
|
|
Наша цель состоит в |
получении оценок «внешних возмущений» |
e3(t) . Поэтому в |
отличие от [2, 3, 7] мы не будем отбрасывать первое уравнение, и построим на основе системы (12) наблюдатель размерности 2n без корректирующих воздействий, но с компенсацией измеряемой переменной s1 e1 в виде:
|
|
|
|
|
|
|
z&1 (L2 K1)z1 z2 L1(s1 z1), |
|
(13) |
|
|
|
|
|
|
|
|
z&2 L2 (L2 K1)s1 (L2 K2 K1)z2 , |
|
|
|
где |
|
z |
Rn |
вектор состояния |
наблюдателя. Относительно |
ошибок |
наблюдения |
|||
|
|
|
|
1,2 |
|
|
|
|
|
|
|
i |
s |
i |
z |
i |
Rn |
получим систему с верхнетреугольной матрицей коэффициентов |
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
1 (L1 K1 |
L2 ) 1 2 , 2 (L2 K2 K1) 2 |
e3 . |
(14) |
|
|
|
|
|
|
|
& |
& |
|
|
Задача синтеза наблюдателя (13), а именно, выбор матриц L1, L2 , сводится к задаче стабилизации системы (14) и разделяется на последовательно решаемые элементарные подзадачи, так как с учетом L1 diag(l1i ),l1i 0, i 1,n и (6) в системе (14) на главной
диагонали находятся собственные значения матрицы коэффициентов. Очевидно, что при выполнении (10) и необходимых условий
l1i k1i l2i , l2i k2i k1i t1 0 :t t1
для переменных системы (14) с точностью до затухающих собственных движений имеют место следующие оценки:
|
|
|
|
|
|
2i |
(t) |
|
|
Ei |
|
|
|
2i , t t2 0, |
|
(15) |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
2i |
|
|
|
|
|
l2i k2i k1i |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Ei |
|
1i |
|
|
|
|
||||||
|
1i |
(t) |
|
|
|
|
|
|
|
|
t t1 t2 |
, i 1, n. |
||||||||||
|
l1i |
k1i l2i |
(l1i |
k1i l2i |
)(l2i k2i |
k1i ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Последовательный выбор |
параметров |
|
l(1, 2)i на |
основе неравенств |
(15) обеспечивает |
|||||||||||||||||
стабилизацию системы (14) и, как следствие, решение задачи наблюдения неизмеряемых
163

переменных s2i (t) с наперед заданной точностью:
2i (t) s2i (t) z2i (t) 2i, i 1,n,
которую назначают с учетом e2 s2 L2e1 в случае, когда для синтеза обратной связи требуется получить оценки e2 (t) .
Наша цель состоит в получении оценок «внешних возмущений» e3(t) . С этой целью из второго уравнения системы (14) выразим
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
2i |
|
|
|
e3i 2i |
,i 1, n , |
||||
l |
2i |
k |
2i |
k |
|||||
|
|
|
|
1i |
|
|
|
||
подставим это выражение в первое уравнение и установим связь между «внешним возмущением» e3(t) , измеряемой ошибкой наблюдения 1(t) e1(t) z1(t) и производными переменных системы (14):
e3i |
(l1i |
k1i l2i )(l2i k2i |
k1i ) 1i |
(l2i |
k2i |
k1i |
) 1i |
|
2i , i |
1,n |
. |
(16) |
|
|
|
|
|
|
|
& |
& |
|
|
|
|
Таким образом, переменные
vi (t) (l1i k1i l2i )(l2i k2i k1i ) 1i (t), i 1,n ,
которые можно трактовать как виртуальные корректирующие воздействия наблюдателя (13), служат оценкой «внешнего возмущения» t t1 в следующем смысле:
e3i (t) vi (t) |
i |
|
(l2i |
k2i |
k1i ) 1i |
(t) 2i (t) |
,i |
1,n |
. |
(17) |
|
|
|
|
|
& |
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для определения точности оценивания (17) составим вспомогательную систему для производных ошибок наблюдения:
|
|
|
|
|
|
1 (L1 K1 L2 ) 1 |
2 , |
|||||||||||||||||||||
|
|
|
|
|
|
&& |
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
& |
|
|
|
|
|
||
|
|
|
|
|
|
2 (L2 K2 |
K1) |
2 e3 , |
||||||||||||||||||||
|
|
|
|
|
|
&& |
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
& |
|
|
|
|
|
||
для которых аналогично (15) имеем: |
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
Ei |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
(t) |
|
|
|
|
|
|
|
|
|
, |
|
|
(18) |
||||||||
|
|
|
|
|
|
|
2i |
|
l2i |
k2i |
k1i |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1i (t) |
|
|
|
|
|
|
|
|
Ei |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t t1, i 1,n. |
||||||||||
|
& |
|
|
|
(l1i |
k1i l2i )(l2i k2i k1i ) |
|
|
|
|
|
|
||||||||||||||||
В силу (16), (18) получим: |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
~ |
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, i 1,n. |
|||||
|
|
|
|
k |
l |
|
|
|
|
k |
|
|
|
k |
||||||||||||||
|
|
i |
|
|
i l |
2i |
|
l |
2i |
2i |
|
|
||||||||||||||||
|
|
|
|
|
|
1i |
|
1i |
|
|
|
|
|
|
|
|
1i |
|
||||||||||
Таким образом, выбором параметров |
|
l(1, 2)i , |
|
обеспечивается желаемая точность |
||||||||||||||||||||||||
|
i |
1,n |
|
|||||||||||||||||||||||||
оценивания смешанной переменной e3(t) . Наблюдатель (13) имеет меньший порядок и более
удобную настройку, что наблюдатель Халила [12], но как любой наблюдатель пониженного порядка чувствителен к шумам в измерениях.
Базовый закон разрывного управления (8) в замкнутой системе (1)–(2) с наблюдателем
(13) реализуется в виде |
u(t) K |
3 |
signv(t) . |
В |
силу (17) |
при t |
t |
возникает реальный |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
скользящий режим в пограничном слое поверхностей разрыва e3i |
0 , i |
|
|
(в отличие от |
||||||||||||||||
1,n |
||||||||||||||||||||
(9)). Как следствие, задача слежения также решается с заданной точностью: |
||||||||||||||||||||
|
|
i |
|
|
|
|
i |
|
|
|
|
i |
|
|
|
|
|
|
||
|
e3i (t) |
e2i (t) |
|
e1i (t) |
|
, i 1, n. |
||||||||||||||
|
k2i |
k1i |
k1i |
(k2i k1i ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
164
Характеристики переходных процессов e1i (t) и заданная точность слежения
обеспечиваются выбором коэффициентов (6).
Результаты моделирования для трехзвенного манипулятора подтвердили эффективность разработанных алгоритмов робастного управления при неполных измерениях.
Работа выполнена при частичной поддержке гранта РФФИ 18-01-00846A.
Библиографический список
1.Уткин В.И. Скользящие режимы в задачах оптимизации и управления. – М.: Наука, 1981. – 368 c.
2.Уткин В.А. Метод разделения движений в задачах наблюдения // Автоматика и Телемеханика. – 1990. – № 3. – С. 27–37.
3.Краснова С.А. Каскадный синтез наблюдателя состояния для нелинейных систем при наличии внешних возмущений //Автоматика и телемеханика. – 2003. – №1. – С. 3–26.
4.Ахобадзе А.Г., Краснова С.А. Решение задачи слежения в условиях неопределенности на основе совместной блочно-канонической формы управляемости и наблюдаемости // Управление большими системами. – 2009. – Вып. 24. – С. 34–80.
5.Краснов Д.В., Уткин А.В. Синтез многофункциональной системы слежения в условиях неопределенности // Управление большими системами. – 2017. – Вып. 69. – С. 29– 49.
6.Краснова С.А. Каскадный синтез системы управления манипулятором с учетом динамики электроприводов // Автоматика и телемеханика. – 2001. – №11. –С. 51–72.
7.Краснова С.А., Уткин В.А., Уткин А.В. Блочный синтез управления механическими системами в условиях неопределенности // Мехатроника, Автоматизация, Управление. – 2009. – №6. – C. 41–54.
8.Краснова С.А., Сиротина Т.Г., Уткин В.А. Структурный подход к робастному управлению // Автоматика и телемеханика. – 2011. – № 8. – С. 65–95.
9.Краснова С.А., Антипов А.С. Иерархический синтез сигмоидальных обобщенных моментов манипулятора в условиях неопределенности // Проблемы управления. – 2016. – №4. – С. 10–21.
10.Уткин В.А. Инвариантность и автономность в системах с разделяемыми движениями
//Автоматика и Телемеханика. – 2001. – № 11. – С. 73–94.
11.Luenberger D.B. Observers of multivariable systems // IEEE Transactions on Automatic Control. – 1966. – Vol. AC-11. – P. 190–197.
12.Khalil H.K., Praly L. High-gain observers in nonlinear feedback control // International Journal Robust and Nonlinear Control. – 2014. – Vol. 24. – P. 993–1015.
-
165

УДК 519.1
ЭФФЕКТЫ ПАМЯТИ В ЗАДАЧЕ О БИНАРНОМ ВЫБОРЕ НА ГРАФАХ
А.В. Леонидов, В.А. Сергеев Физический институт имени П. Н. Лебедева РАН,
Московский физико-технический институт, Университет Дмитрия Пожарского
В работе рассматривается влияние введения памяти в изинговскую функцию полезности агента на пяти графах: периодической двумерной решетки, полный, Эрдеша-Реньи, «Тесный мир», Барабаши-Альберт.
MEMORY EFFECTS IN THE PROBLEM OF BINARY CHOICE ON GRAPHS.
A.V. Leonidov , V. A. Sergeev
The Lebedev Physical Institute of the Russian Academy of Sciences, Moscow Institute of Physics and Technology, University of Dmitry Pozharsky
University of Dmitry Pozharsky
Тhe paper examines the effect of introducing memory into the Ising utility function of an agent on five graphs: a periodic two-dimensional lattice, complete graph, Erdos-Renyi, "Small World", Barabasi-Albert.
Введение
Изучению влияния социальных связей на экономическое поведение индивидов посвящено много работ. Так, Дюрлоф [1], исследуя динамику неравенства доходов путем изучения инвестиций в человеческий капитал и выбора места проживания семей, более 20 лет назад установил, что родители влияют на распределение условных вероятностей будущих доходов своих детей, в том числе, через выбор района, в котором они живут. В более ранней работе Кейс и Катс [2] утверждали, что поведение подростков во многом определяется поведением их сверстников из этого же района. (Например, проживание в «неблагополучном» районе, в котором большая часть молодежи нарушает закон, существенно повышает вероятность вовлечения в преступность – однако это же верно и для посещения церкви). Задолго до появления этих работ Хевеман с коллегами [3] исследуя проблему бедности, представили аналогичные выводы о факторах, определяющих успеваемость школьников в старших классах. Также в 1990-е г. Гисер и соавт. [4] представили модель, с помощью которой показали, что большие различия в показателях преступности для разных городов могут объясняться социальными взаимодействиями.
Один из подходов к анализу социальных влияний - использование функций дискретного выбора. Прорыв в области методов, связанных с дискретным выбором, был сделан в двадцатых годах прошлого века физиками Изингом и Ленцем, предложившим простую, но чрезвычайно глубокую модель взаимодействия спинов на квадратной решетке. С тех пор изинговский формализм нашел многочисленные приложения, в том числе, в экономических и общественных науках. В экономике среди других авторов следует упомянуть Дюрлофа и Блюма [5], которые рассматривали равновесие Нэша на решетке, а также Дюрлофа и Брока [6], анализировавших взаимосвязь между моделями дискретного выбора и моделями статистической механики.
© Леонидов А.В., Сергеев В.А., 2018
166
Изинговский подход позволяет формализовать бинарный выбор взаимодействующих агентов, что естественным образом охватывает широкий спектр социальных явлений. В частности, в недавней работе [7] методами статистической физики было проанализировано соотношение индивидуальной и общественной полезности.
Вданной работе сделана попытка дополнить изинговскую модель принятия решений влиянием памяти, т.е. добавить в модель учет предыдущих действий агента. В силу того, что конфигурация окружения индивида также может влиять на его решение, необходимо исследовать этот вопрос на различных графах. Учету памяти, в частности, были посвящены работы Кирманла и Вренда [8] где ядро памяти в функции полезности отражало лояльность покупателей продавцам на рыбном рынке) и Кациоли с соавт. [9] рассмотревших образование кластеров на периодической решетке.
Обинарном выборе
Вобщем смысле модели бинарного выбора призваны оценить вероятности выбора агента, поставленного между двумя возможными альтернативами. Двумерная модель Изинга [10], лежащая в основе многих таких моделей, рассматривает решетку, в узлах которой расположено дискретное число частиц (агентов), обладающих некоторым двоичным свойством («спином»). Полезность агента:
~ (4) = •W (4) + ∑$• _ $€ $W (4)W$(4) (1)
Гамильтониан системы, зависящий от того, как ориентированы спины на решетке, отражает эволюцию системы в дискретном времени:
(4) = −• ∑ W (4) − ∑$• € $_ $W (4)W$(4) (2)
где: W {1, –1} – «спины» агентов, индексы i,j = 1, 2 ... N, _ $ - элемент матрицы смежности
N N, отражающей их расположение в узлах (в более общей модели с агентами в вершинах сложной сети – сетевую топологию), € $ характеризуют силу связи, а • – внешнее, общее
поле или общественное мнение. В социальном моделировании роль энергии играет общая полезность U, а спины Si отражают состояние агента.
Включение памяти в функцию полезности и динамика
Ключевой идеей работы был учет памяти о предыдущих состояниях индивида в описании системной динамики. Это значит, что полезность Ut(Si) состояния системы в момент t для i-го агента должна включать не только социальное взаимодействие, но и его предыдущий выбор. Для этого в формулу (1) добавлено ядро памяти: слагаемое, которое учитывает предыдущие значения «спина», или выбор индивида:
~ (4) = •W (4) + ∑$• _ $€ $W (4)W$(4) + W (4)ƒ(4 − 1) (3)
где: K(t) -ядро памяти ƒ(4) = ∑ …ˆn d„( I†‡… …), t’ – глубина памяти (сколько предыдущих
состояний мы учитываем).
Параметр δ можно воспринимать как характеристику того, насколько быстро индивид забывает свои предыдущие действия.
Вероятность перехода спина в противоположное состояние:
где – величина обратная температуре.
‰Š‹(I Œ•„( )) (4)
То, как спин будет ориентирован в следующий момент времени, определяется правилом:
W (4 + 1) = 3 ]2( (4) − : (4)) (5)
где : - равномерно распределенная от нуля до единицы случайная величина.
167
В данной работе рассмотрено влияние памяти на динамику системы агентов, расположенных на следующих графах: периодической двумерной решетке, полном графе, а также на сетевых графах Эрдеша-Реньи, «тесного мира» (small-world) и Барабаши-Альберт [11].
Вычислительные эксперименты проводились на графах с N=400 вершинами. Первоначальные значения спинов распределялись случайным образом. Динамика на графе обеспечивается формулой (4). В ядро памяти включались значения каждого спина из десяти предыдущих отсчетов времени. На каждом шаге дискретного времени рассчитывались спины у 400 случайно выбранных вершин. На каждом значении Â для каждой кривой δ рассчитывались по 10 точек, которые затем усреднялись. Варьируя параметр Â, строили кривые, отражающие разную интенсивность влияния памяти.
Моделирование выполнено в на языке программирования R.
Результаты моделирования
На приводимых ниже графиках использованы физические термины: намагниченность m для обозначения среднего значения спина и энергия E для обозначения функции полезности.
Другие обозначения:
dxx – величина пераметра δ
s10 – моделирование с учетом десяти предыдущих значений
s0 - моделирование без учета предыдущих значений
Например: m_d13_s0 – график намагниченности с δ = 1.3 без учета памяти.
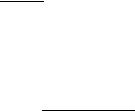
Двумерная периодическая решетка
Рисунок 1. Намагниченность квадратной |
Рисунок 2. Энергия квадратной решетки с |
решетки с δ = 1.2, 1.5, 1.9 |
δ = 1.2, 1.5, 1.9 |
Влияние памяти на увеличение намагниченности, относительно случая без памяти, проявляется при низких Â (высоких температурах), что можно интерпретировать как создание основы для образования кластеров на температурах на которых раньше это было не доступно. С уменьшением температуры память начинает сковывать рост намагниченности и энергии.
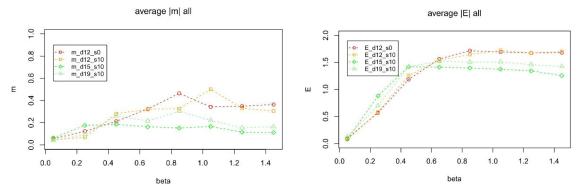
По рис. 3 и 4 хорошо видно, что полный граф приходит в состояние с максимальной намагниченностью, для всех рассмотренных графиков, даже на низких значениях Â, что выделяет эту модель из остальных. Значение среднего спина системы определяется
168
начальными условиями. Если среднее значение спина, после инициации графа случайными значениями, положительно, то все вершины графа примут значение 1. Можно уменьшать вероятность наличия ребра в матрице смежности, вплоть до получения несвязного графа. С уменьшением вероятности, граф будет демонстрировать поведение схожее с моделью Эрдеша-Реньи, которая рассмотрена ниже. Граница существования гигантской компоненты (ГК) % = 1/ , где p – вероятность ребра.
Полный граф
Рисунок 3 Намагниченность полного |
Рисунок 4 Энергия полного графа с δ = 1.2- |
графа с δ = 1.2-2 |
2 |
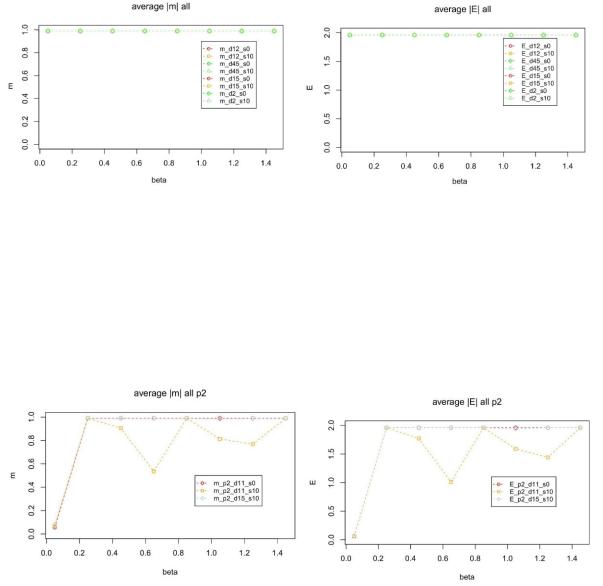
Граф Эрдеша-Реньи (ЭР)
Исследовалось влияние памяти на трех моделях, с различными вероятностями образования ребра p.
Рисунок 5 Намагниченность случайного |
Рисунок 6 Энергия случайного графа ЭР с |
графа ЭР с δ = 1.1, 1.5, для р = 2*ln(N)/N |
δ = 1.1, 1.5, для р = 2*ln(N)/N |
169
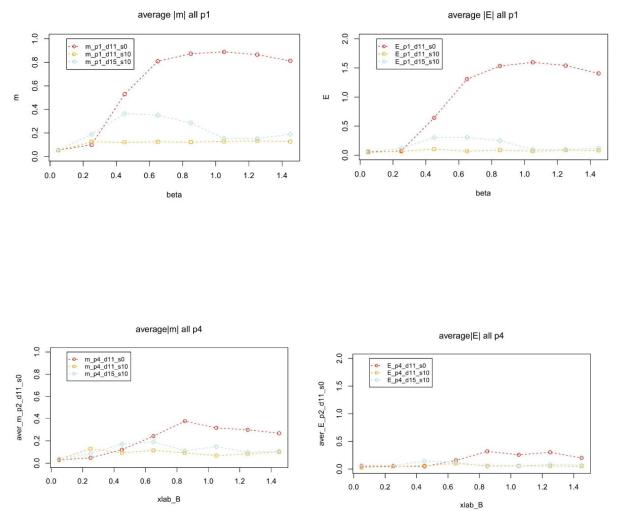
Рисунок 7 Намагниченность случайного |
Рисунок 8 6 Энергия случайного графа ЭР |
графа ЭР с δ = 1.1, 1.5, для р = 0.5*ln(N)/N |
с δ = 1.1, 1.5, для р = 0.5*ln(N)/N |
Рисунок 9.1 Намагниченность случайного |
Рисунок 102 6 Энергия случайного графа |
графа ЭР с δ = 1.1, 1.5, для р = 2/N |
ЭР с δ = 1.1, 1.5, для р = 2/N |
Условие связности: % = |
• •‘(.) |
означает, что при с > 1 граф с большой вероятностью |
|
. |
|
||
связный, где с - константа. |
|
|
|
По результатам видно влияние конфигурации графа. Память при всех значениях р оказывает положительное влияние на рост намагниченности и энергии только на низких Â, иначе говоря на высоких температурах. На низких температурах она замедляет формирование кластеров и рост намагниченности.
Граф «тесного мира» (ТМ)
По начальному условию граф формировался так, что у каждой вершины есть 4 ближайших (т.е. связанных с ней) соседа. Далее с некоторой вероятностью р добавлялось ребро между случайно выбранной парой вершин. Графики для р =2*log(N)/N.
170