

Учебное пособие 800628
.pdf4.Li, S. H., & Liu, Z. G. (2009). Adaptive speed control for permanent magnet synchronous motor system with variations of load inertia. IEEE Transactions on Industrial Electronics, 56(8), 3050–3059
5.Zhang, X., Sun, L., Zhao, K., & Sun, L. (2013). Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques. IEEE Transactions on Power Electronics, 28(3), 1358–1365.
6.Preindl, M., & Bolognani, S. (2013a). Model predictive direct speed control with finite control set of PMSM drive systems. IEEE Transactions on Power Electronics, 28(2), 1007–1015.
7.El-Sousy, F. F. M. (2013). Intelligent optimal recurrent wavelet Elman neural network control system for permanent-magnet synchronous motor servo drive. IEEE Transactions on Industrial Informatics, 9(4), 1986–2003.
8.Skoczowski, S., Domek, S., Pietrusewicz, K., & Plater, B. B. (2005). A method for improving the robustness of PID control. IEEE Transactions on Industrial Electronics, 52(6), 1669– 1676
9.Xi X., Yongdong L., and Min L., “Performance control of PMSM drives using a selftuning PID,” in Proc. of 2005 IEEE International Conference on Electric Machines and Drives, pp.1053-1057.
10.Jung, J. W., Leu, V. Q., Do, T. D., Kim, E. K., & Choi, H. H. (2014). Adaptive PID speed control design for permanent magnet synchronous motor drives. IEEE Transactions on Power Electronics.
11.Kumar, V., Gaur, P. and Mittal, A.P., 2014. ANN based self tuned PID like adaptive controller design for high performance PMSM position control. Expert Systems with Applications, 41(17), pp.7995-8002.
12.Zhang, L., Xu, B.J., Wen, K.L. and Li, Y.H., 2013. The study of permanent magnetic synchronous motor control system through the combination of BP neural network and PID control. In Intelligent Technologies and Engineering Systems (pp. 311-320). Springer, New York, NY.
13.Wang, L., Tian, M., & Gao, Y. (2007, May). Fuzzy self-adapting PID control of PMSM servo system. In 2007. IEMDC'07. IEEE International Conference on Electric Machines & Drives Conference, vol. 1, pp. 860-863.
14.Hsu, S. C., Liu, C. H., Liu, C. H., & Wang, N. J. (2001). Fuzzy PI controller tuning for a linear permanent magnet synchronous motor drive. In The 27th Annual Conference of the IEEE Industrial Electronics Society, 2001, IECON'01, vol. 3, pp. 1661-1666.
15.Еременко Ю.И., Глущенко А.И., Петров В.А. Об использовании нейросетевого настройщика для адаптации П регулятора скорости электропривода прокатной клети // Мехатроника, автоматизация, управление. – 2017. – № 10 (18). – С.685–692.
16.R. De Doncker et al., Advanced Electrical Drives, Power Systems, DOI 10.1007/978-94-007-0181-6 6, Springer Science + Business Media B.V. 2011 (p. 169).
17.Glushchenko AI. Method of Calculation of Upper Bound of Learning Rate for Neural Tuner to Control DC Drive. In International Conference on Neuroinformatics 2017 Oct 2 (pp. 104-109). Springer, Cham.
18.Glushchenko, Anton I. "Neural tuner development method to adjust PI-controller parameters on-line." In Young Researchers in Electrical and Electronic Engineering (EIConRus), 2017 IEEE Conference of Russian, pp. 849-854. IEEE, 2017.
19.Zhu, G., Dessaint, L.A., Akhrif, O. and Kaddouri, A., 2000. Speed tracking control of a permanent-magnet synchronous motor with state and load torque observer. IEEE Transactions on Industrial Electronics, 47(2), pp.346-355.
31

УДК 004.384
ПОВЫШЕНИЕ СКОРОСТИ ЛОГИЧЕСКОГО ВЫВОДА ПРОДУКЦИОННЫХ ЭКСПЕРТНЫХ СИСТЕМ С ПОМОЩЬЮ АСПЕКТНО-ОРИЕНТИРОВАННОГО ПОДХОДА
А.А. Гончаров ТвГТУ
Каждая экспертная система базируется на модели представления знаний. В статье рассматривается актуальный недостаток продукционных моделей знаний, связанный с низкой эффективностью процесса логического вывода, по сравнению с другими моделями представления знаний. Для повышения эффективности процесса логического вывода в продукционных системах предлагается использование аспектно-ориентированного подхода.
INCREASING THE SPEED OF THE LOGICAL INFERENCE OF PRODUCTION EXPERT SYSTEMS WITH THE HELP OF ASPECT-ORIENTED APPROACH
А.А. Goncharov
Tver State Technical University
Еach expert system is based on the knowledge representation model. The article considers the actual shortage of production systems because of the low efficiency of the process of logical inference compared to other models of knowledge representation. The article describes the proposed method for increasing the efficiency of the process of logical inference in production systems based on the applying of an aspect-oriented approach.
Основной текст статьи
Умение экспертных систем (ЭС) решать задачи интерпретации данных, диагностики, мониторинга, проектирования, прогнозирования, планирования и обучения позволило активно применять ЭС в различных отраслях промышленности.
Каждая ЭС базируется на модели представления знаний (МПЗ). Выделяют следующие МПЗ: продукционная модель, семантические сети и фреймы.
Наиболее распространена продукционная модель в силу следующих причин [2]:
модульная организация;
наличие средств объяснения;
наличие аналогии с познавательным процессом человека.
Впервые системы, основанные на продукционных правилах, были предложены в 1943 году Эмилем Постом (Emil Leon Post).
Продукционные системы представляют знания о решении задач в виде правил продукции: «Если [условие], то [действие]». При этом условная часть называется антецедентом (Antecedent), часть действия называется консеквентом (Consequent). Интерпретатор правил выполняет сопоставление антецедентов и консеквентов.
В наиболее абстрактном виде базу данных продукционной экспертной системы можно представить схемой, приведенной на рисунке 1.
©Гончаров А.А., 2018
32
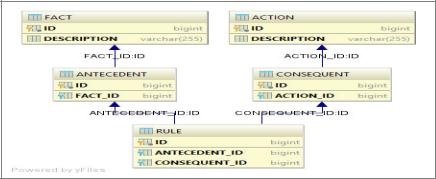
Рисунок 1. База данных продукционной системы
Согласно данной схеме набор правил (таблица RULE) образует базу знаний продукционной системы, набор исходных фактов хранится в таблице FACT, а набор действий хранится в таблице ACTION. Таблица ANTECEDENT содержит данные по связям антецедентов, а таблица CONSEQUENT содержит данные по связям консеквентов.
В качестве примера, рассмотрим продукционную систему, применяемую в ЭС выбора требований, предъявляемых к заданному уровню контроля в соответствии с требованиями руководящего документа «Защита от несанкционированного доступа к информации. Часть 1. Программное обеспечение средств защиты информации. Классификация по уровню контроля отсутствия недекларированных возможностей» (РД НДВ).
Фрагмент набора продукционных правил, согласно разделу 3 из [1], представлен в листинге 1.
Правило 1
Если
[Выбран 4-ый уровень контроля]
то
[Выполнить контроль состава и содержания документа Спецификация (ГОСТ 19.202-78)]
Правило 2
Если
[Выбран 4-ый уровень контроля]
то
[Выполнить контроль состава и содержания документа Описание программы (ГОСТ 19.402-78)]
Правило 3
Если
[Выбран 4-ый уровень контроля]
то
[Выполнить контроль состава и содержания документа Описание применения (ГОСТ 19.502-78)]
...
Правило 19
Если
[Выбран 3-ий уровень контроля]
то
[Выполнить контроль информационных объектов]
Правило 20
Если
[Выбран 3-ий уровень контроля]
то
[Выполнить формирование перечня маршрутов выполнения функциональных объектов]
...
33
Правило 39
Если
[Выбран 2-ой уровень контроля]
то
[Выполнить контроль выполнения функциональных объектов]
Правило 40
Если
[Выбран 2-ой уровень контроля]
то
[Выполнить сопоставление фактических маршрутов выполнения функциональных объектов и маршрутов, построенных в процессе проведения статического анализа]
...
Правило 59
Если
[Выбран 1-ый уровень контроля]
то
[Оформить протокол испытаний]
Листинг 1. Фрагмент набора продукционных правил В данном наборе продукционных правил фактом является значение выбранного уровня
контроля, действиями – требования, предъявляемые к выбранному уровню контроля.
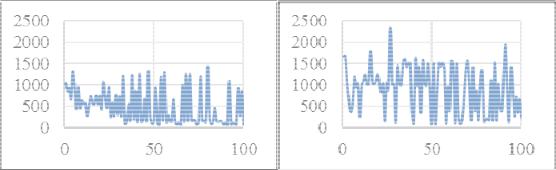
Одним из актуальных недостатков продукционных систем, согласно [3], является меньшая эффективность процесса логического вывода, по сравнению с другими моделями представления знаний. Причина этого в том, что при логическом выводе слишком много времени тратится затрачивается на перебор и непроизводительные проверки применимости правил.
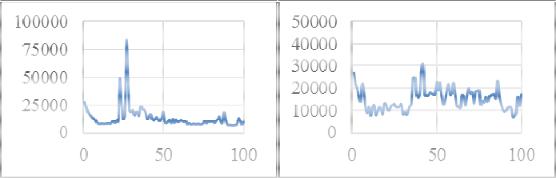
На рисунке 2 приведены значения скорости логического вывода в рассматриваемой базе знаний ЭС из 59 правил. В первом случае без объяснения решения, во втором случае с объяснением решения. На оси y отмечено время выполнения поиска решения в микросекундах, на оси x отмечены номера проведенных тестов.
Рисунок 2. Скорость поиска решения в базе знаний ЭС В качестве метода повышения эффективности процесса логического вывода в
продукционных системах предлагается применение аспектно-ориентированного подхода. Аспектно-ориентированный подход (АО-подход) – техника, позволяющая выявлять
пересекающиеся функциональные элементы и обеспечивать их консолидацию в ходе создания архитектуры и реализации системы. Под системой в данном случае понимается любая информационная система, через которую реализована некоторая предметная область в виде функций бизнес-логики.
Впервые данный подход был представлен в 1997 году Грегором Кичалесом (Gregor Kiczales, Xerox PARC) в работе «Aspect-oriented programming» [4].
Наиболее известная область применения АО-подхода – аспектно-ориентированное программирование (АОП). Использование АО-подхода как метода повышения
34
эффективности процесса логического вывода в продукционных системах ранее не выполнялось.
При использовании АО-подхода, в отдельные сущности, называемые аспектами, инкапсулируется сквозная функциональность.
Сквозная функциональность (Cross-cutting concern) – это функциональность, рассеянная по всему исходному коду ПО, систематически независимая от предметной области [5].
Для внедрения АО-подхода необходимо выполнить декомпозицию системы на модули, а затем, используя концепции АО-подхода, идентифицировать общность модулей, выделив пересечение сквозной функциональности в отдельные аспекты.
Основные концепции АО-подхода [6]:
аспект или модульный элемент (Aspect);
совет или конструкция изменения поведения системы (Advice);
точка соединения или точка вызова (Join point);
срез или конструкция отбора точек соединения (Pointcut);
цель (Target);
компоновщик или аспектный интегратор (Weaver).
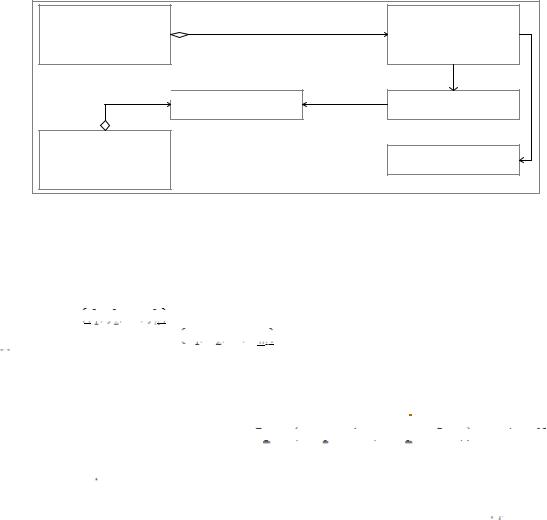
Взаимосвязь концепций АО-подхода в упрощенном виде представлена на рисунке 4. Для связывания аспектов с системой предназначен компоновщик. Результатом
связывания является целевой объект. Целевой объект, в общем случае, складывается из бизнес-логики системы и сквозной функциональности, представленной аспектом.
Рисунок 4. Упрощенная схема АОП Совокупность правил вида Условие Действие, где Условие специфицирует разрез
системы, а Действие задаёт фрагмент кода, активизируемый в системе при выполнении данного условия, по сути дела, формирует аспект [7].
Далее рассмотрим АО-поход как метод повышения эффективности процесса логического вывода в продукционных системах.
Пусть 















 – множество фактов в наборе правил ЭС, где
– множество фактов в наборе правил ЭС, где 


 – общее количество фактов. Пусть
– общее количество фактов. Пусть 















 – множество действий в наборе правил ЭС, где
– множество действий в наборе правил ЭС, где 


 – общее количество действий.
– общее количество действий.
Каждый антецедент включает известный факт из базы данных ЭС, следовательно, 





 , где
, где 


 – множество антецедентов. Каждый консеквент включает известное действие из базы данных ЭС, следовательно,
– множество антецедентов. Каждый консеквент включает известное действие из базы данных ЭС, следовательно, 






 , где
, где 


 – множество консеквентов. Тогда правило можно представить парой
– множество консеквентов. Тогда правило можно представить парой 




























 , где
, где 



 – общее количество правил в базе знаний ЭС.
– общее количество правил в базе знаний ЭС.
Аспектом 




 будем называть пересечение отдельных фактов в антецедентах или действий в консеквентах в наборе правил ЭС. Каждый аспект состоит из среза (Pointcut) фактов или действий. Тогда, в соответствии с требованиями РД НДВ,
будем называть пересечение отдельных фактов в антецедентах или действий в консеквентах в наборе правил ЭС. Каждый аспект состоит из среза (Pointcut) фактов или действий. Тогда, в соответствии с требованиями РД НДВ, 








 – аспект,
– аспект,
35
представляющий описание уровней контроля, 





 – аспект, представляющий требования контроля состава и содержания документации,
– аспект, представляющий требования контроля состава и содержания документации, 








 – аспект, представляющий требования контроля исходного состояния ПО,
– аспект, представляющий требования контроля исходного состояния ПО, 








 – аспект, представляющий требования статического анализа исходных текстов программ,
– аспект, представляющий требования статического анализа исходных текстов программ, 





 – аспект, представляющий требования динамического анализа исходных текстов программ,
– аспект, представляющий требования динамического анализа исходных текстов программ, 





 – аспект, представляющий требования к отчётности.
– аспект, представляющий требования к отчётности.
Заменив в антецеденте и консеквенте конкретный факт или действие выделенным аспектом, получаем представление антецедента в виде 







 , представление консеквента в виде
, представление консеквента в виде 






































 . При этом избавляемся от повторяющихся фактов и действий.
. При этом избавляемся от повторяющихся фактов и действий.
Выявленные пересечения фактов или действий в наборе правил образуют аспект. Множество фактов или действий, которые выделены в аспект, образуют срез. Аспект внедряется в правило через антецедент или консеквент. Роль совета в данном подходе играют факт или действие, которые будут заменены элементом аспекта. Правило, факт или действие в котором будут заменены элементом аспекта, обозначается целью. Интерпретатор правил выполняет роль компоновщика.
В таблице 1 представлен результат анализа составляющих продукционных систем и основных концепций АО-похода.
Таблица 1. Соответствие компонентов продукционных систем и основных концепций АОпохода
№ |
Концепция |
Отражение концепции АО-похода в продукционных системах |
|
п/п |
АО-похода |
||
|
|||
|
|
|
|
1 |
Aspect |
Выявленные пересечения фактов или действий в наборе правил |
|
2 |
Pointcut |
Множество (срез) фактов или действий принадлежащих аспекту |
|
3 |
Join point |
Место внедрения элементов аспекта (антецедент или консеквент) |
|
4 |
Advice |
Факт или действие, которые будут заменены элементом аспекта |
|
5 |
Target |
Правило, факт или действие в котором будут заменены аспектом |
|
6 |
Weaver |
Интерпретатор правил |
Внедрение АО-похода не требует переработки структуры базы знаний и базы данных ЭС. В целях совместимости предлагается использовать АО-поход в интерпретаторе правил.
Фрагмент набора продукционных правил после применения АО-подхода, представлен в листинге 2.
Правило 1
Если
<Уровень контроля «4»>
то
<Контроль состава и содержания документации «Выполнить контроль состава и содержания документа Спецификация (ГОСТ 19.202-78)»>
Правило 2
Если
<Уровень контроля «4»>
то
<Контроль состава и содержания документации «Выполнить контроль состава и содержания документа Описание программы (ГОСТ 19.402-78)»>
Правило 3
Если
<Уровень контроля «4»>
то
36
<Контроль состава и содержания документации «Выполнить контроль состава и содержания документа Описание применения (ГОСТ 19.502-78)»>
...
Правило 19
Если
<Уровень контроля «3»>
то
<Статический анализ исходных текстов программ «Выполнить контроль информационных объектов»>
Правило 20
Если
<Уровень контроля «3»>
то
<Статический анализ исходных текстов программ «Выполнить формирование перечня маршрутов выполнения функциональных объектов»>
...
Правило 39
Если
<Уровень контроля «2»>
то
<Динамический анализ исходных текстов программ «Выполнить контроль выполнения функциональных объектов»>
Правило 40
Если
<Уровень контроля «2»>
то
<Динамический анализ исходных текстов программ «Выполнить сопоставление фактических маршрутов выполнения функциональных объектов и маршрутов, построенных в процессе проведения статического анализа»>
...
Правило 59
Если
<Уровень контроля «1»>
то
<Отчётность «Оформить протокол испытаний»>
Листинг 2. Фрагмент набора продукционных правил после применения АО-подхода.
На рисунке 5 приведены значения скорости логического вывода в базе знаний ЭС после применения АО-подхода.
Рисунок 5. Скорость поиска решения в базе знаний ЭС после АО-подхода
37
Как видим, скорость логического вывода в базе знаний ЭС после применения АОподхода в обоих случаях увеличилась. Выделение аспектов позволило избавиться от непроизводительной проверки применимости правил.
В статье был рассмотрен актуальный недостаток продукционных систем, который согласно [3] выражается в более низкой эффективности процесса логического вывода, по сравнению с другими моделями представления знаний.
Предложенный АО-подход в продукционных системах позволил повысить скорость логического вывода в ЭС. Выделение аспектов позволило сократить количество операций при поиске решения и избавиться от перебора фактов и действий, что привело к повышению скорости логического вывода.
Библиографический список
1.Руководящий документ. Защита от несанкционированного доступа к информации. Часть 1. Программное обеспечение средств защиты информации. Классификация по уровню контроля отсутствия недекларированных возможностей. – М.: Гостехкомиссия России, 1998.
2.Джарратано Дж., Райли Г. Экспертные системы. Принципы разработки и программирование. – М.: Издат. дом "Вильямс", 2007. – С.78.
3.Валетов В.А., Орлова А.А., Третьяков С.Д. Интеллектуальные технологии производства приборов и систем: уч. пособие. – СПб: СПб ГУИТМО, 2008. – С.62.
4.Kiczales G., Lamping J, Mendhekar A., Maeda C, Lopes C, Loingtier J, Irwin J. Aspectoriented programming. Published in preceedings of the European Conference on Object-Oriented Programming (ECOOP), Jyvaskyla, Finland, 1997 [Электронный ресурс]. – Режим доступа: http://people.cs.ubc.ca/~gregor/papers/kiczales-ECOOP1997-AOP.pdf (дата обращения 30.04.2018).
5.Гончаров, А.А. Аспектно-ориентированное программирование в контексте решения вопросов повышения эффективности экономических показателей IT-проектов / А.А. Гончаров, Н.А. Семенов // Программные продукты и системы. – 2016. – № 3. – С. 149-153.
6.Laddad R., Johnson R. AspectJ in Action: Enterprise AOP with Spring Applications, Manning Publ., 2009. – 568 p.
7.Сафонов В.О. Aspect.NET – инструмент аспектно-ориентированного программирования для разработки надежных и безопасных программ // Компьютерные инструменты в образовании, 2007. – № 5. – с. 3-13.
38

УДК 550.34.01
СРАВНИТЕЛЬНЫЙ АНАЛИЗ РЕЗУЛЬТАТОВ МОДЕЛИРОВАНИЯ СОСТОЯНИЯ УЗЛА И ЕГО ПРОГОНОЗ В ЗАДАЧАХ УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СЕТЕВОЙ СТРУКТУРОЙ
А.В. Грачев ГОУ ВПО Сибирский государственный индустриальный университет (СибГИУ)
Системы управления будущего поколения сетевых систем будут представлять собой комплексную распределенную систему с многочисленным оборудованием, в котором главными критериями надежности являются скорость и стабильность узлов передачи. Предложен способ решения задачи управления на основе модельного подхода. Предложен способ для прогнозирования состояния отдельных узлов сети.
COMPARATIVE ANALYSIS OF SIMULATION RESULTS THE STATE OF THE NODE AND ITS PREDICTION IN MANAGEMENT TASKS IN THE DISTRIBUTED NETWORK STRUCTURE
A.V. Grachev
GIA HPE Siberian State Industrial University (SibSIU)
The control systems of the future generation of network systems will be a complex distributed system with numerous equipment, in which the main reliability criteria will be the speed and stability of the transmission nodes.
Введение
Тенденция развития сетей различного назначения, таких как Интернета-Вещей или же мобильные сети и им подобные, ставит задачу управления всей структурой. Эта задача сложна тем, что в состав распределенной сетевой структуры могут входить сотни и тысячи устройств разных производителей и с разными техническими характеристиками.
Структура управления такими сетями должна содержать комплекс средств, опирающийся на сбор, обработку и анализ данных, полученных с множества устройств.
Само количество задействованных устройств неизбежно приведет к формированию программного комплекса, работающего в автоматическом режиме, почти без участия человека. Человек-оператор только задает параметры работы и запускает задачу, а подбор устройств-исполнителей управляющая система должна подбирать сама.
Для реализации подобного подхода было произведено моделирование состояния узла распределенной сетевой структуры.
Моделирование состояния узла осуществлено с помощью метода Монте-Карло. Задачей моделирования являлось сравнение полученных результатов с результатами прогноза, полученного с помощью аппарата искусственных нейронных сетей (АИНС), описанных в работе [1, 2], с целью проверки результатов работы предложенного способа управления и маршрутизации в распределенных сетевых структурах.
Результаты моделирования
Вкачестве инструментария использованы методы имитационного моделирования.
©Грачев А.В., 2018
39
В качестве численного метода решения математических задач использован метод моделирования случайных величин – Монте-Карло.
Для оценки предполагаемых узлов применена следующая методика:
1.Определено количество узлов из тестовой выборки данных;
2.Определены граничные условия для каждого типа данных;
3.В качестве блока случайных величин для моделирования были определены промежутки значений тестовых параметров для каждого типа данных;
4.Проведено моделирование в границах выбранных промежутков для каждого типа
данных;
5.Результат моделирования сравнивался с прогнозом, сделанным с помощью аппарата искусственных нейронных сетей.
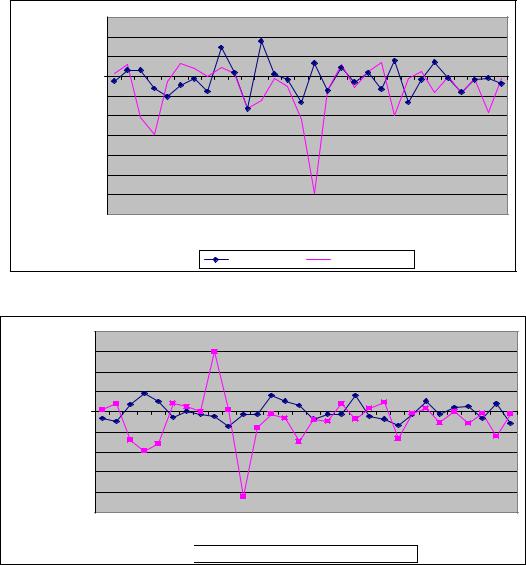
Результатом использования аппарата искусственных нейронных сетей является набор данных, содержащих предполагаемый прогноз состояния узла, с учетом характеристик, которые влияют на работу узлов и сегмента в целом. При моделировании использованы тестовые наборы данных, распределенные по разным типам задач: передача видео, транзитные данные, активный обмен информацией и т.д. Результат представлен на рисунках 1-3.
|
от |
|
0,60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(в |
|
0,40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оценка измения состояния узла |
долях) на прогнозируемом этапе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
текущего |
-0,20 |
1 |
3 |
5 |
7 |
9 |
11 |
13 |
15 |
17 |
19 |
21 |
23 |
25 |
27 |
29 |
||
-0,40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-0,60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-0,80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-1,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-1,20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
-1,40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер цикла работы узла |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Монте-Карло |
прогноз АИНС |
|
|
|
|||||
Рисунок 1 – Реализации состояния узла, полученного с помощью моделирования, и |
|||||||||||||||||
|
|
|
|
прогнозом (фрагмент для границы 0,1) |
|
|
|
|
|
||||||||
|
от |
|
1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(в |
|
0,9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Оценкаизмениясостоянияузла |
долях)напрогнозируемомэтапе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
текущего |
0,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
3 |
5 |
7 |
9 |
11 |
13 |
15 |
17 |
19 |
21 |
23 |
25 |
27 |
29 |
|||
-0,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-0,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-0,9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
-1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
-1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер цикла работы узла |
|
|
|
|
|||||

 Монте-Карло
Монте-Карло 
 прогноз АИНС
прогноз АИНС
Рисунок 2 – Реализации состояния узла, полученного с помощью моделирования, и прогнозом (фрагмент для границы 0,3)
40