

Системы линейных однородных уравнений
Пусть дана система линейных однородных уравнений
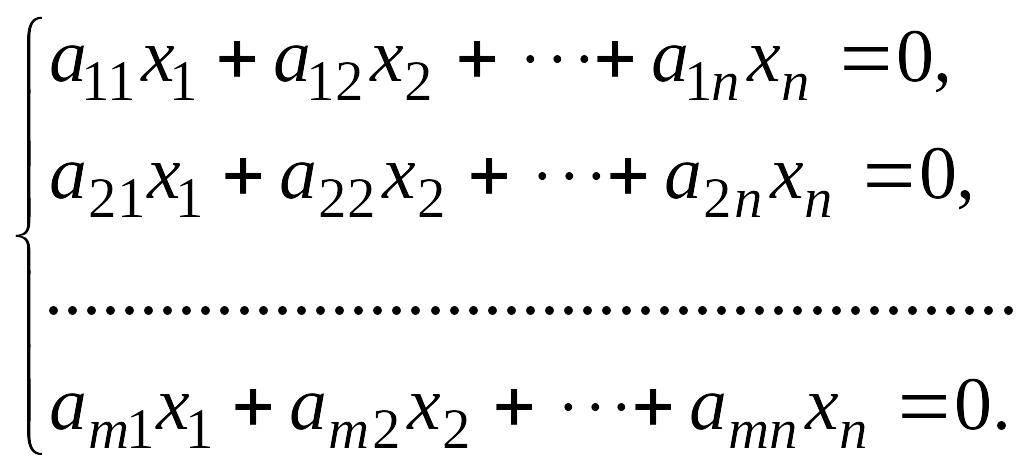
Очевидно,
что однородная система всегда совместна
(![]() ),
она имеет
нулевое
(тривиальное) решение
),
она имеет
нулевое
(тривиальное) решение
![]() .
.
Рассмотрим при каких условиях однородная система имеет и ненулевые решения.
Теорема
4.4. Для того
чтобы система однородных уравнений
имела ненулевые решения, необходимо и
достаточно, чтобы ранг
ее основной
матрицы был меньше числа
неизвестных,
т. е.
![]() .
.
Доказательство.
Необходимость.
Так как ранг
не может превосходить размера матрицы,
то, очевидно,
![]() .
Пусть
.
Пусть
![]() .
Тогда один
из миноров размера
.
Тогда один
из миноров размера
![]() отличен от
нуля. Поэтому соответствующая система
линейных уравнений имеет единственное
решение.
отличен от
нуля. Поэтому соответствующая система
линейных уравнений имеет единственное
решение.
![]() ,
,
![]() ,
.
Значит, других, кроме тривиальных,
решений нет. Итак, если есть нетривиальное
решение, то
.
,
.
Значит, других, кроме тривиальных,
решений нет. Итак, если есть нетривиальное
решение, то
.
Достаточность. Пусть . Тогда однородная система, будучи совместной, является неопределенной. Значит, она имеет бесчисленное множество решений, т. е. имеет и ненулевые решения.
Пусть дана однородная система линейных уравнений с неизвестными
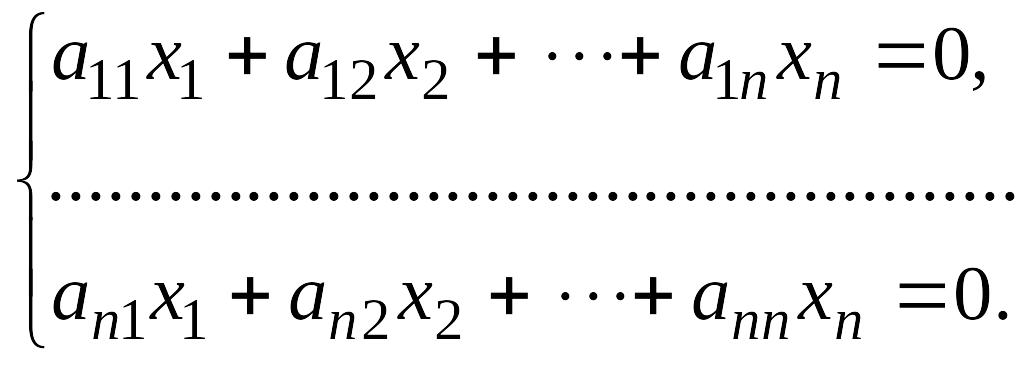
Теорема
4.5. Для
того, чтобы однородная система
линейных
уравнений с
неизвестными
имела ненулевые решения, необходимо и
достаточно, чтобы ее определитель
![]() был равен
нулю, т. е.
.
был равен
нулю, т. е.
.
Если
система имеет ненулевые решения, то
.
Ибо при
![]() система имеет только единственное,
нулевое решение. Если же
,
то ранг
система имеет только единственное,
нулевое решение. Если же
,
то ранг
![]() основной матрицы системы меньше числа
неизвестных, т. е.
.
И, значит,
система имеет бесконечное множество
(ненулевых) решений.
основной матрицы системы меньше числа
неизвестных, т. е.
.
И, значит,
система имеет бесконечное множество
(ненулевых) решений.
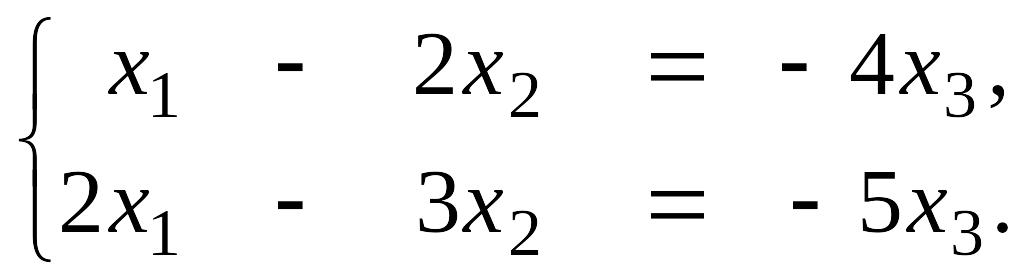
Пример 4.6. Решить систему
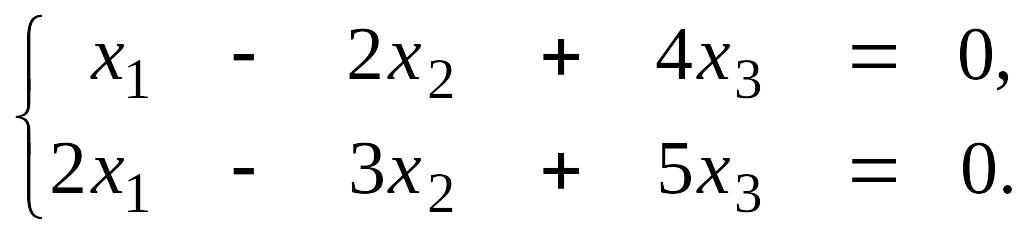
Решение.
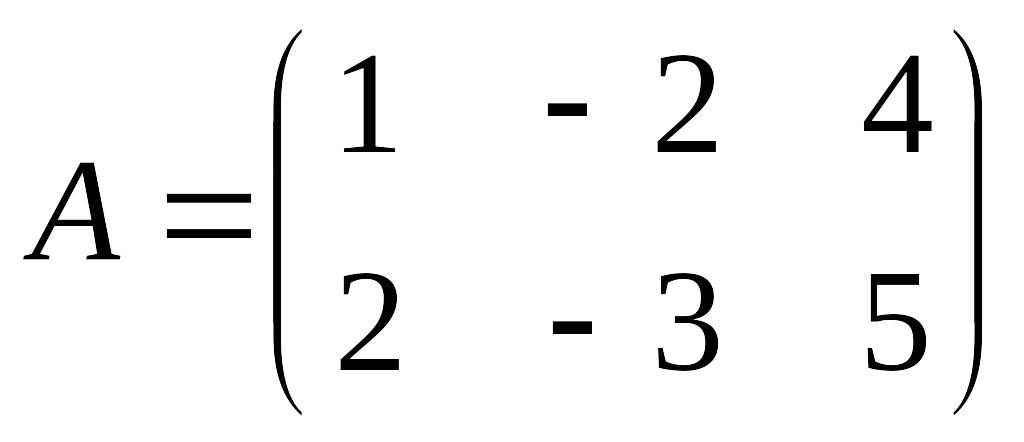 ,
,
 ,
.
,
.
Так как , то система имеет бесчисленное множество решений. Найдем их
 ,
,
 .
.
Стало
быть,
![]() ,
,
![]() — общее решение.
— общее решение.
Положив
,
получаем одно частное решение.
,
,
.
Положив
![]() ,
получаем второе частное решение.
,
получаем второе частное решение.
![]() ,
,
![]() ,
и т. д.
,
и т. д.
II. Элементы векторной алгебры
§5. Векторы
5.1. Основные понятия
Определение. Величины, которые полностью определяются своим численным значением, называются скалярными.
Примерами скалярных величин являются: площадь, длина, объем, температура, работа, масса.
Другие величины, например сила, скорость, ускорение, определяются не только своим числовым значением, но и направлением. Такие величины называют векторными. Векторная величина геометрически изображается с помощью вектора.
Определение. Вектор — это направленный прямолинейный отрезок, т. е. отрезок, имеющий определенную длину и определенное направление.
Если
— начало
вектора, а
— его конец, то вектор обозначается
символом
![]() или
или
![]() .
Вектор
.
Вектор
![]() (у него начало в точке
,
а конец в точке
)
называется противоположным
вектору
.
Вектор, противоположный вектору
(у него начало в точке
,
а конец в точке
)
называется противоположным
вектору
.
Вектор, противоположный вектору
![]() ,
обозначается
,
обозначается
![]() .
.
Длиной
или модулем
вектора
называется длина отрезка и обозначается
![]() .
Вектор, длина которого равна нулю,
называется нулевым
вектором
и обозначается
.
Вектор, длина которого равна нулю,
называется нулевым
вектором
и обозначается
![]() .
Нулевой вектор направления не имеет.
.
Нулевой вектор направления не имеет.
Вектор,
длина которого равна единице, называется
единичным
вектором и
обозначается через
![]() .
Единичный вектор, направление которого
совпадает с направлением вектора
,
называется ортом
вектора
и обозначается
.
Единичный вектор, направление которого
совпадает с направлением вектора
,
называется ортом
вектора
и обозначается
![]() .
.
Определение.
Векторы
и
![]() называются коллинеарными,
если они
лежат на одной прямой или на параллельных
прямых; записывают
называются коллинеарными,
если они
лежат на одной прямой или на параллельных
прямых; записывают
![]() .
.
Коллинеарные векторы могут быть направлены одинаково или противоположно.
Нулевой вектор считается коллинеарным любому вектору.
Определение.
Два вектора
и
называются равными
(![]() ),
если они
коллинеарные, одинаково направлены и
имеют одинаковые длины.
),
если они
коллинеарные, одинаково направлены и
имеют одинаковые длины.
Из определения равенства векторов следует, что вектор можно переносить параллельно самому себе, а начало вектора помещать в любую точку пространства.
На
рисунке 5.1 векторы образуют прямоугольник.
Справедливо равенство
![]() ,
но
,
но
![]() .
Векторы
и
.
Векторы
и
![]() — противоположные,
— противоположные,
![]() .
.

Рис. 5.1.
Равные векторы называют также свободными.
Определение. Три вектора в пространстве называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях.
Если среди трех векторов хотя бы один нулевой или два любые коллинеарные, то такие векторы компланарны.