

9.2. Основные приложения метода координат на плоскости
Расстояние между двумя точками.
Требуется
найти расстояние
![]() между точками
между точками
![]() и
и
![]() плоскости
.
плоскости
.
Искомое
расстояние
равно длине вектора
![]() ,
т. е.
,
т. е.
![]() .
.
Деление отрезка в данном отношении.
Требуется
разделить отрезок
![]() ,
соединяющий точки
и
в заданном отношении
,
соединяющий точки
и
в заданном отношении
![]() ,
т. е. найти координаты точки
,
т. е. найти координаты точки
![]() отрезка
такой, что
отрезка
такой, что
![]() (см.
рис. 9.4).
(см.
рис. 9.4).
Введем
в рассмотрение векторы
![]() и
и
![]() .
Точка
делит отрезок
в отношении
,
если
.
Точка
делит отрезок
в отношении
,
если
![]() .
(9.1)
.
(9.1)
Но
![]() ,
т.е.
,
т.е.
![]() и
и
![]() ,
т.е.
,
т.е.
![]() .
Уравнение (9.1) принимает вид
.
Уравнение (9.1) принимает вид
![]() .
.
Учитывая, что равные векторы имеют равные координаты, получаем
![]() ,
т.е.
,
т.е.
![]() (9.2)
(9.2)
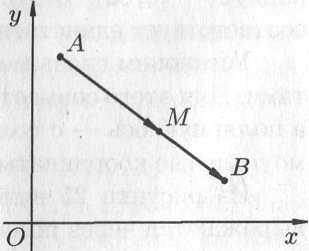
Рис. 9.4
и
![]() ,
т.е.
,
т.е.
![]() .
(9.3)
.
(9.3)
Формулы (9.2) и (9.3) называются формулами деления отрезка в данном отношении.
В
частности, при
![]() ,
т. е. если
,
т. е. если
![]() ,
то они примут вид
,
то они примут вид
![]() ,
,
![]() .
В этом случае точка
является серединой отрезка АВ.
.
В этом случае точка
является серединой отрезка АВ.
Замечание.
Если
![]() ,
то это означает, что точки
и
совпадают, если
,
то это означает, что точки
и
совпадают, если
![]() ,
то точка
лежит вне отрезка
— говорят, что точка
делит отрезок
внешним образом (
,
то точка
лежит вне отрезка
— говорят, что точка
делит отрезок
внешним образом (![]() ,
т.к. в противном случае
,
т.к. в противном случае
![]() ,
т.е.
,
т.е.
![]() ,
т. е.
,
т. е.
![]() ).
).
Площадь треугольника.
Требуется
найти площадь треугольника
![]() с вершинами
,
,
с вершинами
,
,
![]() .
.
Опустим
из вершин
,
![]() ,
,
![]() перпендикуляры
перпендикуляры
![]() ,
,
![]() ,
,
![]() на ось
(см. рис. 9.5).
на ось
(см. рис. 9.5).

Рис. 9.5
Очевидно, что
![]() .
.
Поэтому
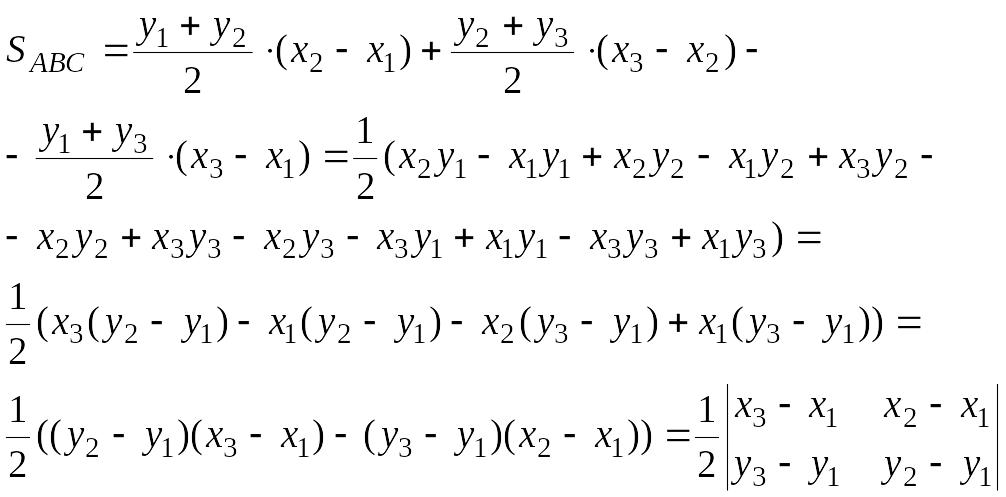
т. е.
 ,
,
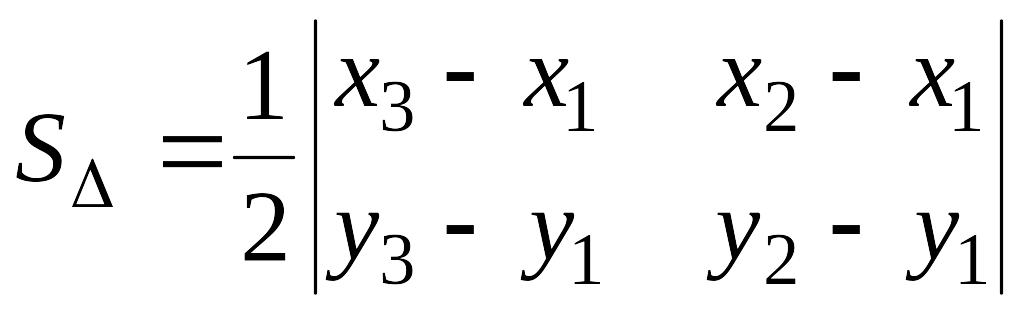
Замечание.
Если при
вычислении площади треугольника получим
![]() ,
то это означает, что точки
,
,
лежат на одной прямой, если же получим
отрицательное число, то следует взять
его модуль.
,
то это означает, что точки
,
,
лежат на одной прямой, если же получим
отрицательное число, то следует взять
его модуль.
9.3. Преобразование системы координат
Переход от одной системы координат в какую-либо другую называется преобразованием системы координат.
Рассмотрим два случая преобразования одной прямоугольной системы координат в другую. Полученные формулы устанавливают зависимость между координатами произвольной точки плоскости в разных системах координат.
Параллельный перенос осей координат.
Пусть
на плоскости задана прямоугольная
система координат
.
Под параллельным переносом осей координат
понимают переход от системы координат
к новой системе
![]() ,
при котором меняется положение начала
координат, а направление осей и масштаб
остаются неизменными.
,
при котором меняется положение начала
координат, а направление осей и масштаб
остаются неизменными.
Пусть
начало новой системы координат точка
![]() имеет координаты
имеет координаты
![]() старой системе координат
,
т. е.
старой системе координат
,
т. е.
![]() .
Обозначим координаты произвольной
точки
плоскости в системе
через
.
Обозначим координаты произвольной
точки
плоскости в системе
через
![]() ,
а в новой системе
через
,
а в новой системе
через
![]() (см. рис. 9.6).
(см. рис. 9.6).
Рассмотрим векторы
![]() ,
,
![]() ,
,
![]() .
.
Так
как
![]() ,
то
,
то
![]() ,
т.е.
,
т.е.
![]() .
.
Следовательно,

Полученные
формулы позволяют находить старые
координаты
и
по известным
новым
![]() и
и
![]() и наоборот.
и наоборот.
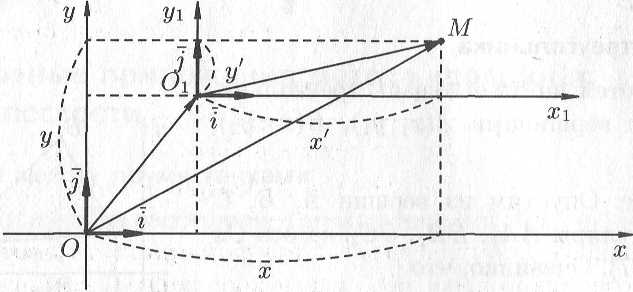
Рис. 9.6
Поворот осей координат.
Под поворотом осей координат понимают такое преобразование координат, при котором обе оси поворачиваются на один и тот же угол, а начало координат и масштаб остаются неизменными.
Пусть новая система получена поворотом системы на угол .
Пусть — произвольная точка плоскости, — ее координаты в старой системе и — в новой системе.
Введем
две полярные системы координат с общим
полюсом
и полярными осями
и
![]() (масштаб одинаков). Полярный радиус
в обеих системах одинаков, а полярные
углы соответственно равны
(масштаб одинаков). Полярный радиус
в обеих системах одинаков, а полярные
углы соответственно равны
![]() и
,
где
— полярный угол в новой полярной системе.
и
,
где
— полярный угол в новой полярной системе.
По формулам перехода от полярных координат к прямоугольным имеем
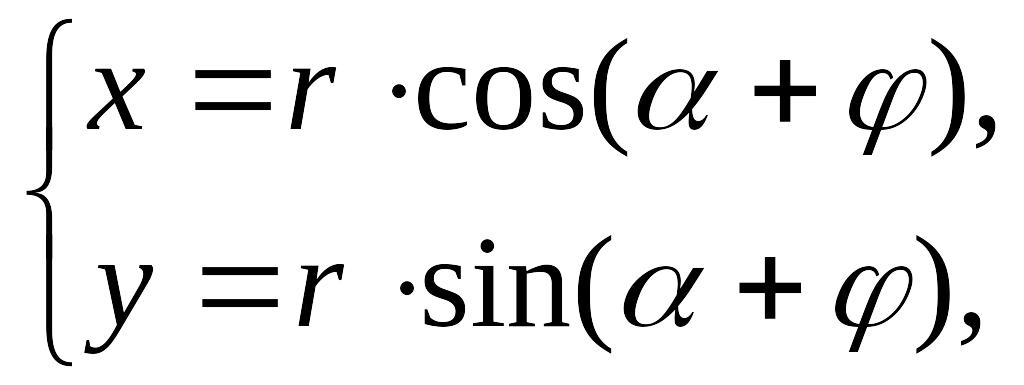 т.е.
т.е. 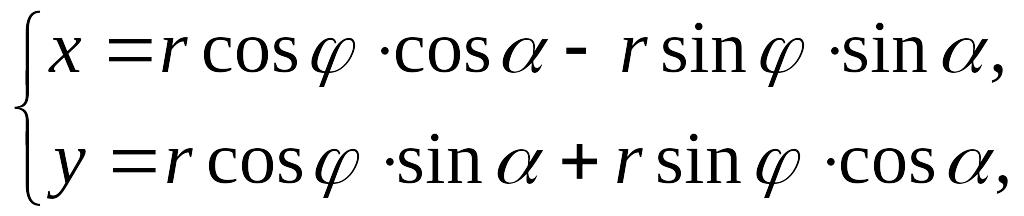
Ho
![]() и
и
![]() .
Поэтому
.
Поэтому .
.
Полученные формулы называются формулами поворота осей. Они позволяют определять старые координаты произвольной точки через новые координаты этой же точки , и наоборот.
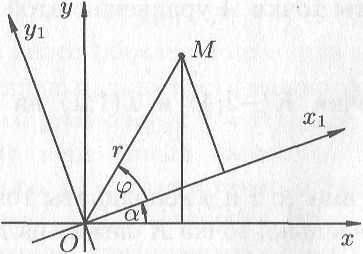
Рис. 9.7
Если
новая система координат
получена из старой
путем параллельного переноса осей
координат и последующим поворотом осей
на угол
(см. рис. 9.8), то путем введения вспомогательной
системы
![]() легко получить формулы
легко получить формулы
 ,
,
выражающие
старые координаты
и
произвольной точки через ее новые
координаты
![]() и
и
![]() .
.
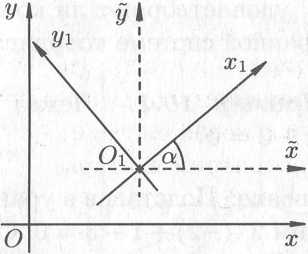
Рис. 9.8