

Адаптивные системы автоматического управления. Учеб. пособие. Литвиненко А.М., Машаров А.В
.pdf
|
УДК 658.52.011.56.012.3.005:658.012.011.56 |
||
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ |
|
|
|
ФЕДЕРАЦИИ |
Литвиненко А.М., Машаров А.В. Адаптивные системы |
||
|
автоматического управления: Учеб. пособие. Воронеж: |
||
Воронежский государственный технический |
Воронеж. гос. техн. ун-т, 2004. 347 с. |
|
|
университет |
|
|
|
|
В учебном пособии изложены основы теории адаптивных |
||
|
систем автоматического управления. |
|
|
|
Издание соответствует |
требованиям |
Государственного |
|
образовательного стандарта |
высшего |
профессионального |
А.М. Литвиненко А.В. Машаров |
образования по направлению 220201 ―Управление и |
||
|
информатика в технических системах‖ при изучении курса |
||
|
―Системы управления роботами‖ для очной формы обучения. |
||
АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО |
Учебное пособие подготовлено в электронном виде в |
||
УПРАВЛЕНИЯ |
текстовом редакторе MS WORD97.0 и содержится в файлах |
||
|
―ВВЕДЕНИЕ.doc‖, ―1.doc‖, ―2.doc‖, ―3.doc‖. |
||
|
Табл. 5. Ил. 45. Библиогр.: 67 назв. |
|
|
|
Научный редактор д-р техн. наук, проф. В.Л.Бурковский |
||
Утверждено Редакционно-издательским |
Рецензенты: НИИ Механотроника-Альфа (ген. директор |
||
советом университета в качестве |
канд.техн.наук Э.Г. Кузнецов) |
||
учебного пособия |
|
|
|
|
д-р техн. наук Ю. С. Сербулов (ВГТА) |
||
© Литвиненко А.М., Машаров А.В.,
2004
© Оформление. Воронежский государственный технический университет, 2004
Воронеж 2004
ГЛАВА 1
1.САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ (СНС)
1.1.Самонастраивающиеся системы как вид самоприспосабливающихся систем и их классификация
Самоприспосабливающимися (адаптивными) называются системы, которые автоматически приспосабливаются к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения структуры и параметров управляющего устройства. Областью применения самоприспосабливающихся САУ является управление объектами, свойства или условия работы которых недостаточно известны или существенно непостоянны.
Автоматическое изменение способа функционирования управляющего устройства, называемое адаптацией или настройкой самоприспосабливающейся системы, требует дополнительных устройств, называемых устройствами или контурами адаптации. В простейшем случае дополнительное устройство — это управляющее устройство адаптации.
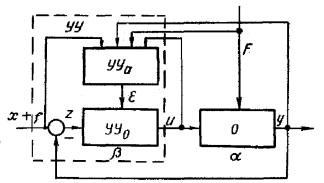
В общем виде схема адаптивной системы приведена на рис. 1.1. На основании оценки внешних условий работы и свойств объекта управляющее устройство адаптации УУа изменяет структуру и параметры основного управляющего устройства УУа, Обеспечивая требуемое значение критерия качества I(х, у, и, F). Устройство адаптации определяет в зависимости от алгоритма работы отклонение критерия I от заданного, или экстремального значения.
Таким образом, УУа решает задачи:
а) получения информации о воздействиях и динамических свойствах объекта управления в процессе его работы (получение рабочей или текущей информации — задача идентификации, или опознавания;
б) формирования из полученной информации значения критерия качества системы I (текущего критерия адаптации);
в) сравнения текущего значения критерия качества с эталонным или экстремальным значением и вычисления соответствующего управляющего воздействия;
г) изменения параметров или структуры основного управляющего устройства УУ0 для приведения критерия качества к требуемому значению.
Критериями качества в зависимости от назначения системы могут быть точность управления (например, минимум СКО), быстродействий какой-либо показатель эффективности, управления (например, коэффициент полезного действия, расход топлива и др.).
Рис. 1.1. Схема адаптивной САУ:
О — объект управления; УУ— управляющее устройство, состоящее из основного управляющего устройства УУ0 и управляющего устройства адаптации УУа.
Адаптивные системы, у которых адаптация осуществляется изменением значений параметров управляющего устройства, называются самонастраивающимися; изменением значений параметров и
14 |
15 |
структуры управляющего устройства— самоорганизующимися. В самоорганизующихся САУ адаптация осуществляется путем выбора структуры, т. е. выбора корректирующего звена или их комбинации из набора определенного числа звеньев изменяемой части основного управляющего устройства, а затем происходит самонастройка параметров выбранной структуры. Такие системы обеспечивают требуемое качество управления при более широких диапазонах изменения свойств объекта и внешних условиях, чем самонастраивающиеся, но более сложны.
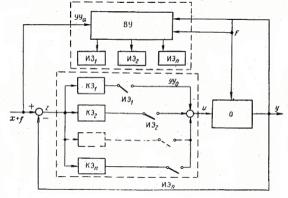
Простейшая самоорганизующаяся САУ с адаптацией коррекции представлена на рис. 1.2, Исполнительные элементы управляющего устройства адаптации ИЭ, получающие сигналы от вычислительного устройства ВУ, включают соответствующие цепи корректирующих элементов КЭ, тем самым изменяя структуру УУ0. Путем автоматического выбора определенной комбинации КЭ осуществляется стабилизация или оптимизация принятого критерия качества I.
Важнейшим свойством самоорганизующихся систем является их способность к обучению и самообучению, т. е. к самоусовершенствованию.
Самоорганизующиеся САУ, в которых в результате целенаправленного изменения структурной схемы в процессе эксплуатации осуществляется усовершенствование алгоритма функционирования, называются самообучающимися САУ.
Рис. 1.2. Схема самоорганизующейся САУ.
В таких системах качество управления (например, точность) повышается по мере эксплуатации системы. В простейшем случае в самообучающуюся систему для усовершенствования алгоритма работы контура адаптации вводится второй контур адаптации со своим управляющим устройством, который корректирует алгоритм работа первого контура адаптации по результатам анализа его функционирования в ходе эксплуатации системы. Управляющее устройство второго контура адаптации должно при этом обладать памятью.
Второй контур адаптации может быть дополнен третьим контуром адаптации, улучшающим со временем алгоритм второго контура, и т. д. Самообучающиеся САУ должны, таким образом иметь иерархическую структуру с рядом этажей адаптации, каждый последующий из которых имеет все более обобщенный ритм функционирования, более долговременную память.
Для самоорганизующихся и самообучающихся систем объем априорной (начальной) информации для достижения заданной цели управления требуется меньший, чем в самонастраивающихся системах, но при этом сложность реализации таких систем возрастает. Априорная информация
17
16
как совокупность заранее известных сведений получается в результате предварительного теоретического или экспериментального исследования. В отличие от априорной информации текущая (рабочая) информация извлекается в результате наблюдений за ходом процесса, т. е. в процессе функционирования системы.
Самонастраивающиеся САУ делятся на САУ со стабилизацией качества управления, задачей которых является поддержание критерия качества управления I на заданном (эталонном) уровне, и САУ с оптимизацией качества управления, осуществляющих поиск и поддержание оптимального значения критерия качества.
САУ со стабилизацией качества управления применяют для стабилизации динамических свойств систем. При этом возможно аналитическое задание эталонных характеристик и применение эталонных моделей. В качестве аналитически задаваемых эталонных характеристик используются коэффициенты дифференциальных уравнений, описывающих поведение систем, коэффициенты передаточных функций, значения частотных характеристик на одной или нескольких частотах, временные характеристики. Критериями качества могут быть динамические характеристики объекта, т. е. частотные и переходные характеристики, статистический критерий точности, различные косвенные критерии качества переходных процессов.
Самонастраивающиеся САУ с оптимизацией качества управления обеспечивают определение и поддержание оптимального значения критерия качества управления I = extr при изменениях внешних условий и свойств объекта. Управляющее устройство в таких системах решает автоматически задачу оптимизации, т. е. поиск оптимальных параметров. Автоматическая оптимизация может осуществляться и в беспоисковых САУ.
18
Рабочей информацией для систем с оптимизацией качества является отклонение принятого критерия от его экстремального значения.
Среди САУ с оптимизацией качества управления различают САУ с экстремальной настройкой корректирующих устройств и системы экстремального управления.
ВСАУ с экстремальной настройкой корректирующих устройств обеспечивается поддержание экстремума критерия качества, характеризующего динамические свойства системы, путем изменения параметров корректирующих звеньев основного управляющего устройства системы. Наиболее часто при этом используется показатель качества переходного процесса или точность основной САУ при случайных воздействиях.
Всистемах экстремального управления поддерживается экстремальное значение такого критерия, который характеризует работу объекта в статическом режиме (в точке экстремума статической характеристики).
По способу получения информации об управляемом процессе различают системы поисковые (экстремальные) и беспоисковые (аналитические).
Поисковой называют систему, в которой изменение параметров управляющего устройства производится в результате поиска условий экстремума заданного критерия качества.
Вбеспоисковых системах информация о динамическом состоянии объекта управления и значений параметров управляющего устройства получается на основании аналитического определения условий, обеспечивающих требуемое качество управления без применения специальных поисковых сигналов. Они требуют большего объема начальной (априорной) информации, чем поисковые, но обеспечивают большую скорость самонастройки, имеют меньшие потери энергии на поиск и могут быть сравнительно простыми из-за отсутствия поисковых движений.
19
Следовательно, если скорость самонастройки является определяющим фактором для реализации принципа адаптации, то (при наличии соответствующей априорной информации) целесообразно применение беспоисковых систем. Кроме того, осуществление поиска иногда является недопустимым.
Для получения информации о состоянии объекта управления или управляемой системы могут использоваться задающие или возмущающие сигналы, поступающие в систему
впроцессе ее работы, или специальные пробные воздействия.
Вкачестве пробного воздействия в СНС (поисковых и беспоисковых) применяют гармонический, случайный, ступенчатый, импульсный сигналы. Выбор пробного сигнала определяется выбором критерия качества I, т. е. типом динамических характеристик, подлежащих контролю.
СНС могут классифицироваться и по наличию замкнутого или разомкнутого контура самонастройки. Первые из них являются более совершенными, но и более сложными в реализации.
По источнику рабочей информации и способу ее получения в процессе функционирования СНС можно разделить на системы, самонастраивающиеся по входному сигналу, по выходному сигналу, системы, настраивающиеся по динамическим характеристикам объекта управления, комбинированные СНС (например, с настройкой по входному сигналу и динамическим характеристикам объекта).
Вдостаточно общем виде уравнения беспоисковой СНС (см. рис. 1.1) можно записать в векторной форме:
y(t) Au (t, )u AF (t, )F (t, 1); u B(t, )z;
z x(t, 2 ) f (t, 3 ) y(t)
или в виде одного операторного уравнения
20
y(t) D(t, , )[x(t, 2 ) f (t, 3 )] C(t, , )Fk (t, 1),
где x(t, 2 ), f (t, 3 ), Fk (t, 1) - векторы соответственно задающего воздействия, помехи, возмущающего воздействия;
1, 2 , 3 |
- |
случайные |
параметры |
соответственно |
||||
возмущающего, задающего воздействия и помехи; |
||||||||
|
|
|
|
|
||||
|
|
, - |
векторы изменяющихся параметров объекта и |
|||||
|
||||||||
изменяемых параметров управляющего устройства [ ( )]; y(t), ,u, z - векторы выходных координат системы и УУа управляющего воздействия и ошибки системы;
Au (t, ), AF (t, ), B(t, ) - операторы объекта по отношению к сигналу u , сигналу F и оператор управляющего устройства;
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Au (t, |
)B(t, ) |
|
|||||||||||
|
|
|
|
|
|
|||||||||||||
D(t, , ) |
; |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
)B(t, ) |
||||||||||||||
1 A (t, |
|
|||||||||||||||||
|
|
|
|
|
u |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
AF (t, |
) |
|
|
|
|
||||||||
|
|
|
|
|
|
|||||||||||||
C(t, , ) |
. |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
) |
|||||||||
|
|
|
)B(t, |
|||||||||||||||
1 A (t, |
||||||||||||||||||
|
|
|
|
|
u |
|
||||||||||||
Для СНС различных типов приведенные уравнения могут несколько упрощаться. Так, для систем с настройкой только
по входному сигналу F (t, ) 0 и =const, для систем с настройкой только по изменяющимся параметрам объекта F (t, ) 0 , f (t, 3 ) = 0, 2 =const, т. е. задающее воздействие
может быть детерминированной или стационарной случайной функцией.
Критерий качества СНС определяется через изменяющиеся и изменяемые параметры выражением
I=I‘( , , x, f , F )
21
или через координаты выхода и воздействий
I=I‘‘( y, x, f , F )
Обеспечение требуемого значения I=Iо осуществляется выбором соответствующего алгоритма контура самонастройки (где Iо — заданный, а I — текущий критерий качества).
Очевидно, вектор ошибки может быть связан с критерием качества и воздействиями:
z Ф( I ) Ф1 (x, f , F , , )
где ∆ I=Iо- I.
Таким образом, изменением параметров i - управляющего устройства достигается подстройка системы при изменении векторов задающего сигнала x помех f , возмущения F и параметров объекта j .
В общем случае СНС описываются нелинейными дифференциальными уравнениями с переменными коэффициентами, что затрудняет их исследование. Поэтому используются различные методы линеаризации: линеаризация путем разложения нелинейных функций в ряд Тейлора, гармоническая и статистическая. Для систем, описываемых уравнениями невысокого порядка, может использоваться метод фазовой плоскости. Эффективным методом исследования СНС является метод моделирования.
Синтез цепей настройки, являющийся сложной задачей и в инженерном, плане нуждающийся в дальнейшем совершенствовании, может осуществляться на основе применения методов вспомогательного оператора и его разновидностей , метода стохастической аппроксимации, второго метода Ляпунова. Целесообразность использования того или иного метода зависит от типа и назначения системы.
22
Для систем с моделями и настройкой по изменяющимся динамическим характеристикам целесообразны методы вспомогательного оператора, метод Ляпунова, для систем c настройкой по входному сигналу, комбинированных СНС — метод стохастической аппроксимации, методы вспомогательного оператора и др.
Выбор конкретного типа СНС и оценка его эффективности должны производиться исходя из назначения системы управления и предъявляемых к ней требований в отношении точности, быстродействия управления, способности бороться с возмущением, надежности, сложности
истоимости.
Вданной главе рассматриваются некоторые типы экстремальных и самонастраивающихся систем: системы экстремального управления с автоколебательным и с принудительным поиском экстремума; дискретно-шаговые экстремальные системы; системы, самонастраивающиеся по динамическим характеристикам объекта управления, самонастраивающиеся по входному сигналу системы и один из типов СНС с комбинированной настройкой — по входному сигналу и динамическим характеристикам объекта управления (СНС с экстремальной настройкой корректирующих устройств).
1.2. Экстремальные системы автоматического управления
1.2.1. Классификация. Методы поиска экстремума
Экстремальные САУ (ЭСАУ) предназначены для поддержания экстремума выбранного показателя качества состояния объекта при недостаточной априорной информации о характере его изменения. Априорной информацией могут быть сведения о наличии экстремума показателя качества. В таких САУ наряду с рабочими имеют место поисковые
23
движения, на основе анализа которых определяется дальнейшее направление рабочего движения. По соотношению рабочих и поисковых движений экстремальные САУ можно разделить на следующие виды:
1)системы с попеременным движением, в которых сначала осуществляется пробное движение, анализируются его результаты, а затем осуществляется рабочее, основное, движение, и дикл повторяется снова;
2)системы, в которых пробное движение производится одновременно с основным и осуществляется в виде импульсов или гармонических колебаний небольшой амплитуды;
3)системы, в которых пробное и основное движения объединены и различия между ними нет. Результат основного движения анализируется управляющей частью системы, и полученные данные используются для управления дальнейшим движением.
По способам организации пробных движений экстремальные системы, бывают с непрерывным поиском и с периодическим или эпизодическим пробным движением.
Системы с непрерывным поиском можно разделить на ЭСАУ с автоколебательным поиском экстремума, в которых даже после нахождения экстремума осуществляется пробное изменение регулируемого параметра относительно его оптимального значения, и на ЭСАУ с принудительным поиском экстремума.
Различают одномерные и многомерные ЭСАУ. В одномерных системах поиск экстремума обеспечивается изменением одной независимой переменной, а в многомерных
—нескольких.
Существуют различные методы поиска. На практике наибольшее распространение подучили методы поиска Гаусса
— Зайделя, метод градиента, метод наискорейшего спуска.
24
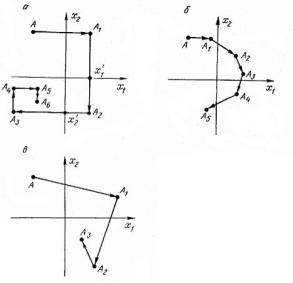
Рис. 1.3. Методы поиска.
Метод Гаусса — Зайделя представляет собой ряд циклов, в каждом из которых изменяется одна переменная при постоянных значениях других (рис. 1.3, а). Полагаем, что в первом цикле происходит изменение величины x1 и движение происходит от точки А до точки A1 по прямой. Изменяя x1, следует искать минимум показателя качества работы системы
I.
Предположим, что минимум оказался в точке A1. В следующем цикле изменяется величина x2 при постоянном найденном значении x1, и движение идет по прямой параллельно оси ординат до точки A2 в которой функция I имеет другой минимум. В последующем опять изменяется x1
при x2—const и т. д.
Метод прост, но требует длительного времени на поиск. В усложненном варианте этот метод еще называют релаксационным. При этом вначале определяется из всех переменных величин одна, оказывающая наиболее
25

существенное влияние на изменение I, и затем уже изменяется только эта величина, а остальные полагаются неизменными.
Метод градиента (рис. 1.3, б) заключается в следующем. В исходной точке А отыскивается направление наискорейшего изменения функции I, т. е. направление градиента I:
n |
I |
|
|
gradI I |
i j , |
||
x |
|||
j 1 |
|
||
i |
|
где i — ортогональные единичные векторы осей координат.
Затем, совершив небольшое перемещение в сторону, противоположную направлению градиента, т, е. в направлении наибольшего изменения функции I, попадают в точку A1, где определяют новое направление градиента, затем попадают в
точку A2 и т. д.
На плоскости градиент определяется формулой
gradI I i1 I i2
x1 x2
Практически направление градиента находится путем небольшого изменения регулируемых величин хj и определения частных производных функций показателя качества по изменяемым величинам.
Метод наискорейшего спуска (рис. 1.3, в), предложенный Л. В. Канторовичем, обеспечивает для широкого класса функционалов минимальное число циклов при заданной степени приближения к экстремуму. При этом перемещение происходит по лучу, направленному противоположно градиенту в точке A1 до тех пор, пока функция I не станет минимальной на этой прямой (точка A1). Затем в точке A1
26
находят новое направление градиента и перемещаются по новому лучу до точки A2 и т. д.
1.2.2. Статическая характеристика показателя качества вблизи экстремума
Статические характеристики определяются либо аналитически, либо экспериментально. Очень часто эти характеристики нельзя использовать для анализа процессов в экстремальной системе из-за их сложности. Поэтому используют упрощенные аналитические выражения вида
n |
|
|
|
I ( y) (ai xi2 |
bi, j xi x j |
a j x2j ) |
(1.1) |
i, j 1 |
|
|
|
Если, коэффициенты ai, |
aj, bi,j |
принять |
за функции |
времени и учесть, что xi , xj также изменяются во времени, то с
помощью функции |
I(у) с достаточной |
степенью |
точности |
|
могут |
быть |
аппроксимированы |
практически |
любые |
экспериментальные характеристики. |
|
|
||
Коэффициенты функции y=f(xi) чаще всего определяются первыми членами разложения действительной статической характеристики в ряд Тейлора.
Частные случаи выражения (1.1) имеют вид |
|
y=a2x2+a1x+a0, |
(1.2) |
или уравнения параболы |
|
y=ax2 |
(1.3) |
или эллиптического параболоида |
|
y=a1x12+ a2x22, |
(1.4) |
27 |
|
Пример 1.1. Считая, что I(у) имеет гладкий экстремум при независимой переменной, равной х, найти приращение показателя качества.
Решение. Разлагая I(у) в ряд Тейлора и полагая, что система работает достаточно точно и отклонения от экстремума невелики, можно ограничиться тремя членами разложения:
I(y)=I(x+r)=I(x)+I‘(x)r + 12 I‖(x)r2.
Приращение показателя качества равно
I(x+r)-I(x)=q=Kr2,
где
K= 12 I‖(x).
В точке экстремума
I‘(x)=0.
1.3. Экстремальные системы автоматического управления с автоколебательным поиском экстремума
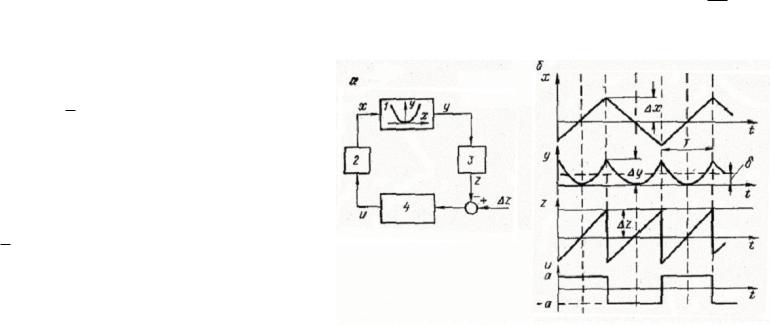
1.3.1. Экстремальные системы автоматического управления с дифференцированием показателя качества
Структурная схема ЭСАУ приведена на рис. 1.4, а, где 1— объект управления с экстремальной характеристикой, связывающей вход и выход объекта соотношением
y=K2x2; |
(11.5) |
28
2 — исполнительная часть управляющего устройства (в
виде интегратора) с передаточной функцией Ки(р) = Kp0 ; 3 —
дифференциатор (датчик показателя экстремума); 4 — реверсирующее устройство.
Рис. 1.4. Структурная схема ЭСАУ (а) с эпюрами сигналов (б).
Изменение выхода объекта у (рис. 1.4,6) регистрируется дифференциатором.
При постоянной скорости изменения входного сигнала объекта х скорость изменения выходного сигнала объекта, определяемая выражением
z= |
dy |
2K 2 x |
dx |
, |
(1.6) |
|||
dt |
dt |
|||||||
|
|
|
|
|
|
|||
где |
|
dx |
const , |
|
||||
|
dt |
|
||||||
|
|
|
|
|
|
|
||
29

пропорциональна отклонению от экстремума х, а знак ее зависит от знака х и dxdt . После прохождения экстремума, как
только величина z = |
dy |
достигнет значения порога ∆z, |
|
dt |
|||
|
|
реверсирующее устройство меняет знак сигнала на входе интегратора, и система начинает двигаться к экстремуму.
Вследствие изменения знака |
dx |
в момент реверса |
|
|
|||
dt |
|||
|
|
изменяется скачком и величина z и затем снова растет до порога ∆z. Выходная величина объекта имеет среднее отклонение от экстремума δ, называемое потерей на поиск. Амплитуда колебаний выходной величины около экстремума у называется зоной поиска.
Основные соотношения, характеризующие установившийся режим системы, следующие: согласно выражению (1.6) и рис. 1.4, б,
|
dy |
= |
|
2 |
|
2 x |
|
|
|
||||
z = |
|
|
|
2K |
|
х |
|
; |
|
|
|||
|
|
|
|
|
|
|
|||||||
|
dt |
|
|
|
|
T |
|
|
|
|
|||
в свою очередь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 x |
4K |
2 |
x2 |
|
|
|||
zmax=∆z= 2K |
|
хmax |
|
|
|
|
|
, |
(1.7) |
||||
|
T |
|
|
T |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
где Т — период автоколебаний. На основании выражения (11.5)
∆y=K2∆x2 |
(1.8) |
Из сопоставления уравнений (1.7) и (1.8) следует", что
∆y= zT .
4
Величину зоны поиска ЭСАУ ∆y выбрать сколь угодно малой нельзя из-за того, что минимальная величина ∆z, ограничена наличием случайных помех на входе дифференциатора, а минимальное значение Т ограничено влиянием случайных помех на входе интегратора (исполнительной части). Малым значениям Т (см. рис. 1.4, б) соответствует большая скорость нарастания координаты х, т. е.
|
|
dx |
|
K |
a, |
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
dt |
0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||
где а=const. |
|
|
|
|
|
|
|
|
|
|
|
|
В свою очередь |
|
|
|
|
|
|
|
|
|
|
|
|
|
∆x= K0a |
T |
. |
|
|
|
|
(1.9) |
||||
|
|
|
|
|
|
|
||||||
|
|
2 |
|
|
|
|
|
|
||||
Используя значения х, из выражения (1.8) находим |
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
T= |
|
y 2 |
y. |
(1.10) |
||||||||
|
|
|||||||||||
K0aK |
||||||||||||
Функциональная зависимость зоны поиска от параметров системы определится подстановкой значения Т в выражение
(1.9), т. е.
|
z 2 |
|
∆y= |
4 2 . |
(1.11) |
Потери на поиск определяются выражением
T
|
|
|
T |
|
T |
|
|
|
|
y |
|
|
1 |
T |
ydt |
2 |
2 |
ydt |
(1.12) |
ср |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
или с учетом того, что
30 |
31 |