

Учебное пособие 2015
.pdf
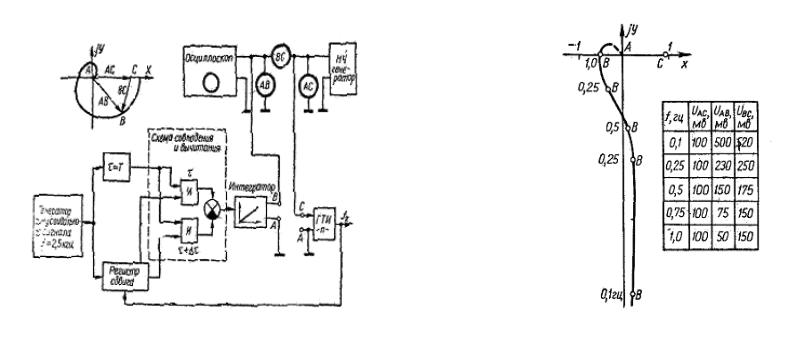
. Схема снятия характеристики приведена на рис. 3.29. На рис. |
|
ЛИТЕРАТУРА К ГЛАВЕ 3 |
|
3.30 приведена амплитудно-фазовая частотная характеристика |
1. |
А л л е н, У э е т е р ф и л, д.— Зарубежная |
|
разомкнутой схемы макета (см. рис. 3.15) по каналу |
радиоэлектроника, 1964, 12. |
|
|
управления, полученная экспериментально и обладающая |
2. А м и а н т о в. И. Н,, Т и х о н о В. И.— Радиотехника, |
||
достаточно большим запасом устойчивости. |
1959, 14, 4. |
|
|
|
3. |
Б л е к м а н В. Х. Исследование стационарного |
|
|
магнитогидродинамического потока.— В кн.: Ионные, |
||
|
плазменные и дуговые ракетные двигатели. Госатомиздат, М., |
||
|
1961. |
|
|
|
4. |
Б р у ф м а н С. С. Цифровые индикаторы. «Энергия», |
|
|
М.—Л., 1964. |
|
|
|
5. |
Б у т у с о в И. В. Цифровые устройства для |
|
|
автоматического контроля, измерения и управления. «Недра», |
||
|
Л., 1964. |
|
|
|
6. |
Б у т у с о в И. В., С и р о м а х а И. Ф.— Автоматика и |
|
|
приборостроение, 1965, 4. |
|
|
|
7. |
В а с и л ь е в В. I. Eкстремальнi системb без |
|
|
пошукових коливань. «Технiка» , К., 1966. |
||
|
8. |
В е н т ц е л ь . С. Теория вероятностей. Физматтиз, М., |
|
|
1962. |
|
|
|
9. |
Г е н и с А. А., Г о р н ш т е й н И. Л П у г а ч А. Б. |
|
|
Приборы -тлеющего разряда. Гостехиздат УССР, К., 1963. |
||
|
10. И в а х н е н к о А. Г. Техническая кибернетика. |
||
|
Гостехиздат УССР, К., 1959. |
- |
|
|
11. К о з у б о в с к и й С. Ф. Автоматические |
||
|
корреляционные измерители скорости. Изд-во АН УССР, К., |
||
|
1963. |
|
|
339
338
35. Ч и н а е в П. И., Ч у г у н о в И. И. Бесконтактные самонастраивающиеся системы на цифровых элементах. «Технiка» К., 1965.
36.D I a m a n t i d e s N. D. Quantization, statistics and matching of maps and pictures, IEEE Trans., 1964, ANE-11, 3, September.
37.D i с k е у F. R. Vе1ocitу sensing for soft lunar landing by correlation between spaced microwave reivers, IRE International Convention Record, Part 5, 1961.
38.G a t l a n d H. B., L o v e l l B. W. A correlation function computer using delta modulation techniques, Journal of Scientific Instrument, Vol. 42, No. 8, 1965.
39.H o r t o n B. M. Noise-modulated distance measuring systems, Proceedings of the IRE, 1959, 47, 5.
40.M u l l e r W. T., L a n g e F. H. Beruhrungsfreie Abstandmessung mittels statistischer Testsignale, Zeitschrift fur Messen, Steuern, Regein (Zmsr), 1964, 12.
41.S p I l k e r J. J. Delay-lock tracking of binary signals, IEEE Trans., 1963, SET-9, 1, March.
42. W a t t s D. G. A general theory of amplitude quantization with applications to correlation determination, Proc. IEE, 1962, c109, 15.
342