

Учебное пособие 2015
.pdfR |
|
1 |
T |
f t f |
|
t dt |
1 |
T |
f t f t dt, |
|||
T |
|
|
T |
|
||||||||
T |
|
1 |
|
2 |
|
1 |
1 |
T |
||||
|
|
|
|
|
|
|
||||||
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
имеет |
максимум |
при |
|
T . Сигналы |
предполагаются |
|||||||
стационарными и эргодичными. При этом скорость движения металла может быть определена по показанию БРЗ, так как
t
.
Скорость при взаимно корреляционном методе может быть измерена не только путем слежения за положением точки максимума взаимной корреляционной функции (рис. 3.7, е), но и путем отслеживания любой другой заданной точки этой функции, например, удаленной по оси абсцисс на фиксированное расстояние от максимума (рис. 3.7. д) или имеющей некоторое фиксированное значение ординаты (рис
3.7, е).
Корреляционный метод (наряду с очень высокой точностью) обладает рядом положительных качеств: он не требует контакта с движущейся поверхностью, не предъявляет никаких требований к ее электрическим и магнитным свойствам и может быть применен также для измерения скорости движения цветных металлов, скорости горячего
проката и т д. [ ].
Наиболее перспективными областями применения автоматических корреляционных измерителей скорости являются измерение скорости движения различных непрерывных полосовых материалов (полоса горячего или холодного металла, ткани, пластмассы, бумаги), а также измерение скорости раз-
272
личных движущихся объектов (речные суда, самолеты, автомобили на воздушной подушке), т. е. во всех случаях, где имеет место перемещение относительно какого-либо носителя ин
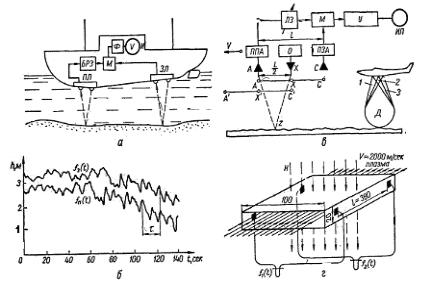
формации и где контактные методы неприменимы. Так, с помощью корреляционного метода может быть измерена скорость движения речного судна относительно дна с использованием сигналов, полученных от двух разнесенных эхолотов. На рис. 3.8, а приведена блок-схема такого измерителя. При движении судна сигналы переднего эхолота
— fn t и заднего эхолота — fa t подобны по форме, но сдвинуты во времени (рис. 3.8, 6).
Перспективны также корреляционные измерители скорости движения самолета относительно поверхности земли
(рис.3.8, е).
Возможно использование корреляционных методов для измерения вертикальной составляющей скорости при осуществлении мягкой по садки на Луну [37].
В ходе исследований, связанных с созданием магнитогидродинамических генераторов, возникает необходимость измерения больших скоростей высокотемпературной плазмы. С помощью двух токосъемников или фотодатчиков (рис. 3.8, е) с движущейся плазмы могут быть сняты подобные, но сдвинутые во времени сигналы, что говорит о принципиальной возможности применения и в этом случае корреляционного метода измерения скорости [3].
273
2. Методы автоматизации корреляционных измерителей скорости
При исследовании корреляционных измерителей скорости (например, измерителей скорости движения металла при прокатке) как объектов автоматизации интерес представляет прежде всего зависимость их статических характеристик (взаимно корреляционных функций входных сигналов) от скорости движения (металла). При хорошей повторяемости формы входных сигналов их взаимно корреляционная функция R в пределе совпадает по форме с автокорреляционной функцией
Рис. 3.8. Примеры измерения скорости корреляционным методом:
274
а – блок-схема измерения скорости речного судна; ПЛ – носовой эхолот; ЗЛ - кормовой эхолот; БРЗ – блок регулируемого запаздывания; М – множительное устройство; Ф – фильтр; И – измеритель выходного сигнала; б – записи сигналов двух эхолотов, установленных на носу и на корме судна; в – корреляционный измеритель скорости самолета; А – передняя приемная антенна; С – задняя приемная антенна; Х – антенна передатчика; О – бортовой сигнал; СВЧ – передатчик; ППА – приемник передней антенны; ПЗА – приемник задней антенны; ЛЗ – линия регулируемой задержки; М – множительное устройство; У – усреднитель (сглаживающий фильтр); ИП – измерительный прибор; АХС – начальное положение антенны; А Х С - положение антенны через время; Д – диаграммы направленности главных лепестков передающей 2 и приемных 1, 3 антенн; г – схема снятия сигналов для измерения скорости плазмы корреляционным методом.
A . На рис. 3.9 приведены автокорреляционные функции A и спектральные плотности S входных
сигналов коррелятора, вычисленные для различных скоростей движения металла (холодиокатанная сталь; скорости движения – от 0,6 до 17,3 м/сек).
275
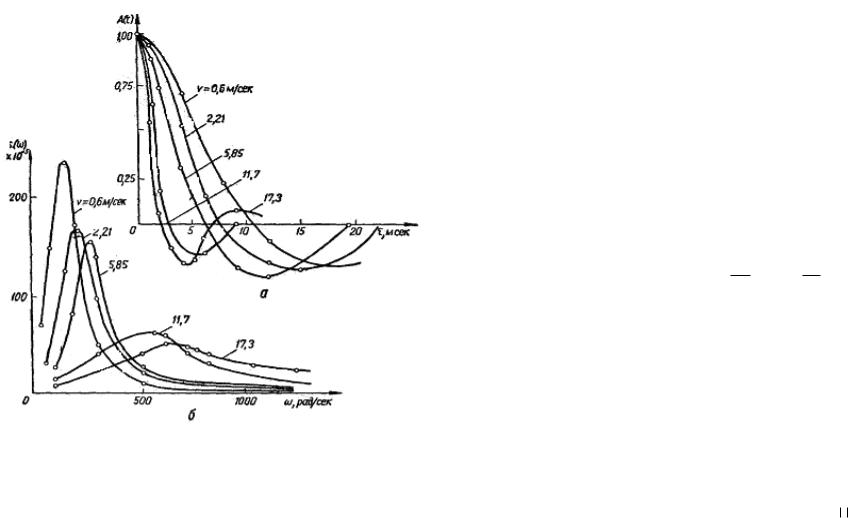
Рис. 3.9. Автокорреляционные функции (а) и спектральные плотности (б) входных сигналов коррелятора.
Автокорреляционные функции вычисляются путем замены реализации случайного сигнала рядом из n его дискретных значений при помощи выражения
276
|
A |
|
1 |
n m |
ti |
x ti m , |
|
||
|
x |
(3.56) |
|||||||
|
|
||||||||
|
|
|
|
n m |
|
|
|
||
где x ti x ti mx |
|
|
|
|
i 1 |
|
|
x t на |
|
центрированное значение сигнала |
|||||||||
|
|
1 |
n |
|
|
|
|
|
|
i -м интервале; mx |
|
x ti его математическое ожидание; |
|||||||
|
|||||||||
|
|
n i 1 |
|
|
|
|
|
||
n — число интервалов квантования исходного сигнала; m — число
интервалов сдвига m t .
Необходимое время интегрирования (осреднения) T определяется по методике, изложенной в работе В. В. Солодовникова [21], исходя из соотношения
2 T 1 ,
Tн A
где Tн — период, соответствующий низшей частоте входного сигнала;
A — относительная погрешность определения корреляционной функции.
Как видно из рис. 3.9, увеличение скорости движения металла приводит к расширению спектра сигнала и к соответствующему измерению формы его автокорреляционной функции.
После аппроксимации автокорреляционной функций (рис. 3.9, а) выражением A A 0 e cos и применения
преобразования Фурье для тех же значений скорости вычислены спектральные плотности входного сигнала.
277
s |
A 0 |
|
2 2 2 |
|
|
|
, |
||
|
2 2 2 4 2 2 |
|||
приведенные на рис.3.9,б, Как видно из рис.3.9,б, имеет место однозначная зависимость между положением максимума кривой спектральной плотности на оси абсцисс и скоростью.
Деформация автокорреляционной функции сигнала, снимаемого с движущейся поверхности и кривой его спектральной плотности в зависимости от скорости позволяет применять для измерения скорости автокорреляционные и спектральные методы, использующие сигнал, непрерывно снимаемый лишь с одной точки движущейся поверхности [14]. Эти методы используют зависимость от скорости ординат указанных кривых (при фиксированном значении их абсцисс), абсцисс точек пересечения этими кривыми фиксированного уровня или зависимость от скорости абсциссы точки максимума спектральной плотности. Автокорреляционный и спектральный методы проще взаимно-корреляционного метода, однако они требуют стационарности входного сигнала и нормирования его характеристик. Поскольку оба метода используют разомкнутые схемы без элементов самонастройки, более подробно они рассматриваться не будут
Как видно из рис.3.7, в, выходной сигнал коррелятора имеет четко выраженный максимум т. е.
коррелятор является объектом с экстремальной характеристикой. Это позволяет для его автоматизации применить технику экстремального регулирования. Экстремальный регулятор ЭР подключается к выходу коррелятора (рис.3.7, а) и, воздействуя на БРЗ, поддерживает максимальное значение R . Значение
278
скорости отсчитывается непосредственно по шкале БРЗ. Каким должен быть экстремальный регулятор?
В автоматических корреляционных измерителях скорости необходимо значительное быстродействие, так как экстремальная характеристика, соответствующая корреляционной функции при изменении скорости металла, быстро перемещается по оси абсцисс. Быстродействие системы прежде всего ограничено инерционностью самого процесса вычисления корреляционной функции — временем интегрирования или осреднения (т. е. постоянной времени интегратора или сглаживающего фильтра).
Процесс отыскания максимума корреляционной функции при помощи обычных схем экстремальных регуляторов (шагового типа, с модулирующим воздействием и др.) связан с поисковыми колебаниями [10]. Время, необходимое для поиска, уменьшает быстродействие системы. Например, регулятор шагового типа для выработки нужного регулирующего воздействия должен был бы опробовать по крайней мере две точки характеристики объекта, на что потребовалось бы дополнительное время. В регуляторе с модулирующим воздействием значительное ограничение на быстродействие системы накладывает сглаживающий фильтр после синхронного детектора. Следует также отметить, что все перечисленные системы экстремального регулирования достаточно сложны.
Недостатком поисковых экстремальных систем является также то, что в закон их регулирования кроме сигнала ошибки, характеризующего удаление от экстремума неизбежно входят слагаемые зависящие от помехи (возмущения, перемещающего характеристику объекта регулирования в вертикальном на-
279
правлении). Это приводит к тому, что при определенной скорости дрейфа экстремума система теряет устойчивость.
Как показано в [7], для решения некоторых экстремальных задач (например, автоматизация процесса химической очистки воды) возможно создание дифференциальных схем экстремального регулирования, которые обеспечивают выход системы в область экстремума без поисковых колебаний. Такие схемы приводят к существенному упрощению системы, повышают ее быстродействие. Применение дифференциальных схем особенно выгодно в тех случаях, когда можно создать простую модель объекта регулирования.
Рассмотрим |
дифференциальную схему |
автоматизации |
|||
корреляционного |
измерителя |
скорости |
проката, |
||
использующую модель объекта регулирования [12, 13]. |
|||||
Система (рис. 3.10) должна автоматически определять |
|||||
величину |
регулируемого |
запаздывания |
T , |
||
соответствующую |
максимуму |
взаимной |
корреляционной |
||
функции сигналов |
f1 t и f2 t f1 t T . |
|
|
||
Объектом |
|
регулирования |
является |
коррелятор, |
|
состоящий из БРЗ , множительного устройства 2 и интегратора (сглаживающего фильтра) 4. На объект
регулирования |
воздействуют |
регулирующее |
воздействие |
(управляющее |
напряжение |
на входе БРЗ) |
и возмущение |
(изменение транспортного запаздывания T |
сигнала второго |
||
канала f2 t f1 t T при |
изменении скорости металла. |
||
Выходная величина объекта регулирования - это напряжение, снимаемое с интегратора (фильтра) 4, соответствующее взаимной корреляционной функции R2 .
280
Особенностью дифференциальной системы является наличие модели объекта регулирования (второго канала коррелятора). Сигнал f3 t с выхода БРЗ подается на блок
постоянного запаздывания , а затем, вместе с сигналом f2 t на множительное устройство 1. Сигнал с множительного
устройства поступает на вход сглаживающего фильтра 3, с выхода которого снимается взаимная корреляционная функция R1 t выходной сигнал «модели» (второго канала коррелятора).
Характеристика модели R1 имеет точно такой же вид, как и характеристика объекта R2 , но сдвинута по оси
влево на величину постоянного запаздывания (рис.3.10, б). Выходные сигналы объекта и модели подаются на вычитающее устройство 5, с выхода которого снимается сигнал ошибки, равный их разности: U R2 R1 .
Усиленный сигнал ошибки воздействует на БРЗ, изменяя в нужную сторону величину введенного регулируемого запаздывания .
Равновесие в системе наступает при значенииT 2 , соответствующем абсциссе точки пересечения
двух корреляционных функций — характеристик объекта R2 и модели R2 . Эта точка всегда удалена от точки
экстремума на фиксированную величину .
2
Для правильного определения скорости движения метал-
281
ла нужно знать не значение |
T |
, |
а значение |
T |
, равное |
|
2 |
|
|
||
|
|
|
|
|
|
транспортному запаздыванию |
|
сигнала f1 t T . Поскольку |
|||
заранее известно значение , последнее учитывается при градуировке БРЗ в единицах измерения скорости. Необходимое значение определяется при проектировании заданной системы на основании полученной экспериментальным путем корреляционной функции. Таким образом дифференциальный регулятор обеспечивает работу системы в режиме, соответствующем точке пересечения характеристик объекта и модели. Сигнал ошибки вырабатывается непрерывно, без поисковых колебаний.
Разностная характеристика U в области равновесия
системы имеет значительно большую крутизну, чем характеристика объекта в области экстремума, что определяет повышенную чувствительность системы к регулирующему воздействию.
Схема может быть упрощена, если осуществить вычитание выходных сигналов множительных устройств, а фильтр включить на выход вычитающего устройства (рис. 3.10, в). Если регулирующее воздействие на БРЗ осуществляется при помощи сервомотора (например, путем смещения читающей головки в БРЗ с магнитной записью), то фильтр на выходе вычитающего устройства не нужен, так как сервомотор выполняет функции интегратора и сглаживает флуктуации выходного напряжения.
Дальнейшее упрощение рассмотренной выше дифференциальной схемы можно получить, если вычитание
282
сигналов двух каналов |
f2 t и |
f4 t произвести до их |
перемножения, а полученный разностный сигнал U |
||
перемножить с сигналом |
f2 t (рис. 3.10, в). |
|
Эквивалентность рассмотренных выше трех вариантов дифференциальной схемы можно легко показать при помощи
следующих несложных преобразований. |
|
Разностную характеристику U схемы (рис. |
3.10, а) |
можно записать в виде |
|
U M f2 t f3 t M f2 t f4 t , |
(3.57) |
где M — знак операции математического ожидания.
На основании теоремы о сложении математических ожиданий что выражение может быть переписано в виде
|
U M f2 t f3 t f2 t f4 t . |
(3.58) |
|
Этому |
выражению |
соответствует |
блок-схема, |
приведенная на рис.3.10, в. Преобразовав последнее выражение к виду
U M f2 t f3 t f4 t , |
(3.59) |
прейдем к блок-схеме, приведенной на рис. 3.10, г.
Рассмотрим уравнение динамики дифференциальной схемы (рис.3.10. а). При этом воспользуемся методикой,
изложенной в пункте .1, и будем считать, что статическая экстремальная характеристика объекта регулирования (корреляционная функция R2 ) достаточно точно
аппроксимируется параболой, а сам объект регулирования (первый объект коррелятора) может быть представлен схемой замещения, состоя-
283
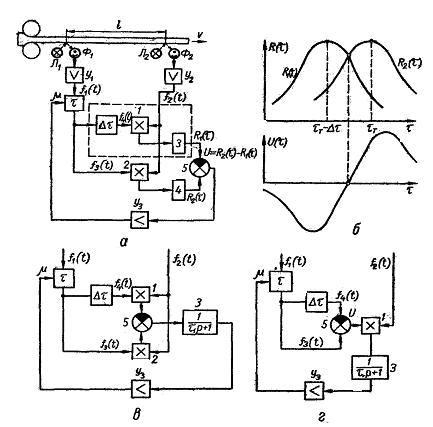
Рис. 3.10. Дифференциальные схемы автоматизации корреляционного измерителя скорости проката:
а – блок-схема системы с двумя фильтрами; б – ее характеристика; в – система с одним фильтром; г – система с
одним множительным |
устройством, Л1, Л2 |
осветители; |
Ф1,Ф2 фотоэлементы; |
У1,У2 ,У3 усилители; |
- БРЗ; |
блок посто- |
|
|
янного запаздывания; 1 – множительное устройство модели объекта регулирования (второго канала коррелятора); 2 – множительное устройство объекта регулирования (коррелятор); 3, 4 – сглаживающие фильтры; 5 – вычитающее устройство.
щей из последовательно соединенных нелинейного безынерционного и линейного инерционного звеньев (рис. 3. 11), уравнения которых имеют вид
x a 2 a 2 |
, |
(3.60) |
2 p 1 2 3 x, |
|
(3.60а) |
где ; T — возмущение, |
перемещающее |
|
экстремальную характеристику объекта (корреляционную функцию) в горизонтальном направлении; —
регулирующее воздействие (регулируемое запаздывание в |
|
БРЗ); |
— помеха, перемещающая экстремальную |
характеристику в вертикальном направлении; a —
коэффициент |
крутизны экстремальной |
характеристики; |
|
2 R2 |
— |
регулируемая величина |
(корреляционная |
функция на выходе коррелятора); 2 — постоянная времени фильтра коррелятора; x — промежуточная переменная (напряжение на выходе множительного устройства); 2 — коэффициент усиления коррелятора.
Соответственно уравнения звеньев модели объекта регулирования (второго канала коррелятора) можно записать в
виде |
y a 2 |
a 2 |
|
(3.61) |
|
1 p 1 2 |
1 y, |
|
|
||
|
|
|
|
||
|
|
|
285 |
|
|
284
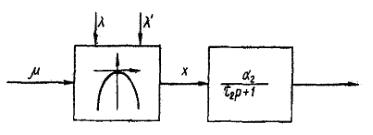
Рис.3.11. Схема замещения объекта регулирования (первого канала коррелятора).
где y — выходная величина множительного устройства модели; 1 R1 — выходная величина модели;
— сдвиг характеристик объекта и модели; 1 — постоянная времени фильтра модели; 1 — коэффициент усиления модели.
Вычитающее устройство (закон регулирования) |
|
U 2 1 |
(3.62) |
Блок регулируемого запаздывания (с усилителем и |
|
исполнительным двигателем) |
|
2 p 1 p 2U. |
(3.63) |
Из первых. двух уравнений получаем уравнение объекта регулирования
2 |
|
|
a 2 |
|
|
|
2 |
|
2 |
|
(3.64) |
||
2 p |
1 |
|
||||
|
|
|
|
|||
|
|
|
286 |
|
|
|
Аналогично из двух последующих уравнений находим
1 |
|
1a 2 |
1 |
(3.65) |
1 p 1 |
|
|||
|
|
|
|
Рассмотрим работу системы в установившемся режиме. Учитывая, что при этом p=0 ( т. е. x y 1 2 0 ), можно записать выражение для закона регулирования
U |
2 |
a 2 |
2 |
2 a |
|
|||
|
1 |
|
|
1 |
1 |
(3.66) |
||
a 2 |
|
|
. |
|
|
|||
2 |
|
|
|
|||||
1 |
|
|
1 |
|
|
|
||
При равенстве коэффициентов усиления модели и |
||||||||
объекта 1 2 это выражение упрощается |
|
|
||||||
|
|
U 2 a a 2 . |
|
(3.67) |
||||
|
|
1 |
|
|
|
1 |
|
|
Нетрудно видеть, что в закон регулирования не входит помеха , а Управляющее воздействие U зависит лишь от величины рассогласования и от сдвига характеристик объекта и модели (т. е. от дополнительного постоянного
запаздывания в канале модели). Указанное обстоятельство делает дифференциальную систему абсолютно инвариантной к возмущениям, смещающим корреляционную функцию в вертикальном направлении [7].
Учтя, что при равновесии системы U=0 и 2 1 , легко
определять абсциссу точки пересечения разностной характеристикой оси абсцисс
|
. |
(3.68) |
|
2 |
|
287 |
|
|
Ранее аналогичное выражение для абсциссы точки пересечения характеристик объекта и модели было получено из геометрических соображений:
. |
(3.69) |
T |
2 |
|
Из выражения для закона регулирования нетрудно получить соотношение, связывающее ошибку системы с параметрами последней при неравенстве коэффициентов усиления ( 1 2 ):
|
|
|
|
|
|
|
|
|
|
|
1 1 2 2 |
|
|
|
1 2 |
||||
|
a |
2 |
|||||||
|
|
|
|
|
|
|
|
(3.70) |
|
|
2 |
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
Рассмотрим влияние изменения параметров системы на ее статическую ошибку, для чего воспользуемся формулами теории измерений:
|
|
1 |
|
|
|
2 |
... |
|
n |
(3.71) |
|
|
|
|
|
||||||||
1 |
|
2 |
n |
||||||||
|
|
|
|
|
|
|
и
,
где 1, 2 , n — изменяемые параметры системы;
— абсолютная ошибка;относительная ошибка.
288
Соответствующие частные производные будут иметь вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
1 |
|
2 1 2 |
1 |
|
2 |
|
2 |
2 |
|
|
2 |
. |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
a |
|
|
1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
|
2 1 2 |
1 |
2 |
|
2 |
2 |
2 |
|
, |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
a |
|
|
1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
(3.72) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
2a2 1 2 2 |
a |
2 1 2 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Используя эти уравнения, записать |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
M |
|
N a , |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
1 |
|
|
2 |
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
M 1 2 |
|
N a |
, |
|
(3.73) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 2 |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
M |
2 1 2 |
1 |
2 |
|
|
|
|
|
|
|
|
; |
||||||||||||||||||||||||
|
|
|
2 |
|
|
2 |
|
2 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
a |
|
|
|
1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
289 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||

|
N |
|
|
2 1 |
|
|
|
; |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
2 1 2 2 |
|
2 |
1 2 |
|
|
||||||
|
|
|
|
|
|
|||||||
|
|
a |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
; 2 ; a a . |
|
|||||||||
|
1 |
1 |
2 |
|
2 |
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Как видно из полученных выражений, абсолютная и |
||||||||||||
относительная |
статические |
|
|
ошибки |
|
|
определяются |
|||||
абсолютными |
и |
|
|
относительными |
|
|
отклонениями |
|||||
изменяющихся |
параметров |
1, 2 , a, 1, 2 , a |
При |
|||||||||
равенстве относительных |
отклонений |
1 |
2 ошибки в |
|||||||||
системе не возникает (см. выражение для ). Поскольку относительная ошибка системы пропорциональна произведению коэффициентов усиления 1,2 , последние
должны выбираться не слишком большими. Крутизна параболы уменьшает абсолютную и относительную погрешности. Из приведенных выше формул видно, что во всех случаях основным требованием для уменьшения ошибки дифференциальной схемы КИСП является возможно более точное равенство коэффициентов усиления объекта и модели (обоих каналов коррелятора) 1 2 . При проектировании дифференциальной схемы КИСП дополнительное постоянное запаздывание второго канала коррелятора должно быть достаточно малым (как видно из последних формул, статическая ошибка системы пропорциональна величине сдвига характеристик объекта и модели )
Для получения уравнения динамики рассмотренной выше дифференциальной системы решим совместно уравнения ее звеньев. Искомое уравнение относительно и имеет вид
290
3 p 1 p 1 p 23a |
|||
2 |
|
a |
(3.74) |
3 |
a 2. |
||
|
3 |
|
|
Итак, система автоматического регулирования в этом случае описывается линейным дифференциальным уравнением третьего порядка, решение которого не представляет трудности. Для выбора варьируемых параметров системы можно применить известный метод компромиссной настройки [10].
Это уравнение удобно рассматривать относительно
координаты |
|
|
|
U 2 1, |
|
p 3 p 1 p 1 2 3 U p 3 p 1 2 k , |
(3.75) |
|
где |
|
|
|
k a 1. |
|
Рассмотренная |
дифференциальная |
система |
автоматизации КИСП отличается от известных экстремальных систем не только простотой, но и рядом существенных преимуществ:
1) для выхода на экстремум система не требует поисковых колебаний;
2) при правильном выборе коэффициентов усиления |
||
обоих коррелятора |
1 2 |
система инвариантна к |
возмущению, смещающему корреляционную функцию в вертикальном направлении;
З) быстро системы при отслеживания горизонтального дрейфа экстремума ограничивается лишь скоростными воз-
291