

Учебное пособие 2015
.pdfзначением
T
T 2 K 2 2 0
4x 2
T 2
2 |
2x |
|
|
2 |
|
|
|
||||
y=K |
|
|
|
|
|
t |
, |
|
|
||
|
|
|
|
|
|
||||||
|
|
|
T |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
T |
|
|
|
8y t |
|
|
y . |
|
||||||
t 2 dt |
2 |
(1.13) |
|||||||||
|
|
3 |
|
|
|
|
|||||
|
|
|
T |
|
3 |
|
|||||
|
|
|
|
|
3 |
|
|
||||
C помощью выражения (1.11) находим функциональную зависимость потерь на поиск от параметров системы:
z 2 δ= 12 2 .
Наличие апериодических звеньев и запаздывания в системе увеличивает амплитуду «рыскания» (потери на поиск). Так, при запаздывании, равном η ,
|
|
1 |
|
z |
2 |
|
|
|
|
|
|
|
|
|
2 |
. |
|
|
|
|
|
|
3 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
При |
оптимальном |
|
|
|
значении |
|
опт |
|
z , |
|
|
|
|
|
|
|
|
|
2 |
||
|
|
|
|
|
|
|
|
|
||
соответствующем минимуму δ, находим
δmin= 23 z .
Описанная САУ, у которой в качестве датчика показателя экстремума (ДПЭ) используется дифференциатор, обладает низкой помехоустойчивостью. Более помехоустойчивыми являются ЭСАУ с запоминанием
минимума, или, как их еще называют, позиционные. Дифференцирующие звенья в этих системах отсутствуют.
32 |
33 |
1.3.2. Экстремальные системы автоматического управления с запоминанием минимума
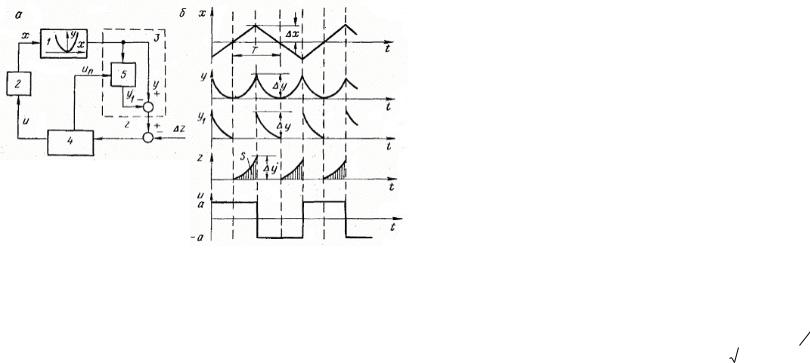
Структурная схема ЭСАУ с запоминанием минимума приведена на рис. 1.5, а. Отличается она от ранее рассмотренной системы лишь ДПЭ. ДПЭ представляет собой сумматор, на один вход которого поступает величина с выхода объекта управления непосредственно, а на другой — через блок 5.
Рис. 1.5. Структурная схема ЭСАУ с запоминанием минимума (а)
и эпюрами сигналов (б).
Этот блок характерен тем, что на его выходе появляется величина —y1, не отличающаяся от у на ниспадающей ветви параболы, но лишь только выходная величина объекта начинает увеличиваться, выходная величина блока 5 «застывает», запоминая пройденное минимальное значение у.
34
Эпюры сигналов в различных точках схемы приведены на рис. 1.5, б.
Таким образом, после прохождения величины у через минимальное значение выход блока 5 «застывает», и величина z=y— y1 на выходе сумматора начинает увеличиваться от нуля. Как только эта разность достигнет порога ∆z, срабатывает реверсирующее устройство, и величина х начинает изменяться в противоположную сторону. Реверсирующее устройство выдает сигнал и на блок 5 с целью «подтягивания» значения y1 до уровня у, и цикл повторяется снова.
Схемные варианты блока 5 могут быть различны. Помехоустойчивость системы можно повысить, если
сравнивать с порогом ∆z величину z, пропущенную через
интегрирующее звено с передаточной функцией |
K1 |
.Реверс |
||||
p |
||||||
|
|
|
|
|
||
при этом произойдет лишь тогда, когда площадь |
|
|
||||
|
T |
|
|
|
|
|
2 |
|
z . |
|
|
||
S= ydt |
|
(1.14) |
||||
0 |
|
K1 |
|
|
||
Действительно, при прохождении z через интегрирующее звено высокочастотные случайные помехи фильтруются и оказывают меньшее влияние на работу системы в целом. Ранее полученные соотношения справедливы и для данной системы. С учетом интегрирующего звена в цепи сигнала z, согласно выражениям (1.10), (1.12), (1.13), (1.14), находятся потери на поиск:
|
|
K |
z |
2 3 |
||
|
|
|
||||
3 |
3 |
0 |
|
. |
||
|
|
|||||
|
|
|
K1 |
|
|
|
|
|
|
|
|
||
1.3.3. Применение метода гармонического баланса для определения параметров автоколебательного режима экстремальных систем автоматического управления
35
В установившемся режиме все сигналы замкнутой цепи ЭСАУ становятся периодическими функциями. Предполагается, что сигнал x на входе объекта равен
x=A0sinωt. (1.15)
Физическим обоснованием такого предположения являются фильтрующие свойства системы. Требуется определить неизвестные: ω — частоту и A0 — амплитуду колебаний.
Из выражения (1.5) находим
|
KA0 2 |
|
KA0 |
2 |
|
|
y |
|
cos2t |
|
|
yср yпер , |
(1.16) |
2 |
2 |
|
||||
|
|
|
|
|
||
где yср — постоянная, yпер — переменная с частотой 2ω составляющие на выходе объекта.
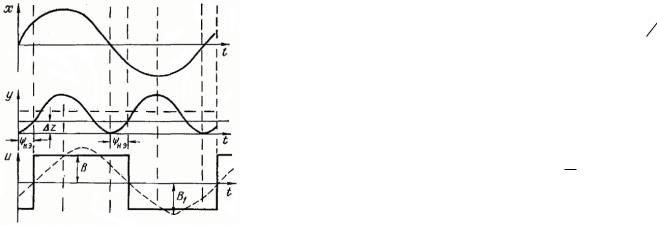
Рис. 1.6. Эпюры сигналов в ЭСАУ.
На рис. 1.6 показаны изменения сигналов на входе и выходе объекта и эпюра сигнала на выходе нелинейного элемента НЭ (реверсирующего устройства).
Использование метода гармонического баланса для определения параметров установившегося режима иллюстрируется на примере ЭСАУ с запоминанием минимума (см. рис. 1.3,а). Полагаем, что реверс величины и на выходе НЭ происходит тогда, когда у после достижения минимума возрастает до величины порога ∆z. Это вызовет запаздывание по фазе сигнала на выходе НЭ на величину ψНЭ по отношению к сигналу х. Данное запаздывание может быть определено на основании рис. 1.6, согласно выражению
∆z= |
KA0 |
2 |
1 cos2НЭ |
. |
(1.17) |
2 |
|
||||
|
|
|
|
|
В соответствии с методом гармонического баланса на выходе НЭ следует учитывать лишь первую гармонику
|
|
|
|
|
|
C1 |
4 |
2B sind |
4 |
B |
|
|
|
||||
|
0 |
|
Учитывая частотные свойства исполнительного устройства и запаздывание по фазе, вносимое НЭ, для первой гармоники на выходе НЭ имеем
x 4 BK ( )sin[ t ( )] , (1.18)
|
НЭ |
|
где K(ω) и θ(ω) — значения амплитудно-частотной и фазо-частотной характеристик исполнительной части ЭСАУ на частоте автоколебаний.
Условия баланса амплитуд и баланса фаз находятся из сопоставления выражений (1.18) и (1.15):
36 |
37 |

|
|
|
A0= |
4 |
|
BK ( ); |
|
(1.19) |
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
( ) НЭ , |
|
(1.20) |
||||||
где, согласно выражению (1.17), |
|
|
|||||||||
НЭ |
|
1 |
|
|
2 z |
|
|
||||
|
arccos 1 |
|
|
|
. |
(1.21) |
|||||
|
|
2 |
2 |
||||||||
|
|
2 |
|
|
K |
|
A0 |
|
|
||
Совместное решение уравнений (1.19) и (1.20) с учетом выражения (1.21) позволяет найти амплитуду и частоту автоколебаний. Из уравнения (1.20) находим:
|
|
|
|
2z |
2 |
|
|
|
(1.22) |
||
( ) 1 arccos 1 |
|
|
; |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
K 2 *16B2 K 2 ( ) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
cos[2 ( )] 1 |
|
2z 2 |
|
|
. |
|
(1.23) |
||||
K 2 *16B2 K 2 ( ) |
|
||||||||||
Уравнение (1.23) удобно решить графически, путем |
|||||||||||
построения зависимостей: |
|
|
|
|
|
|
|||||
|
|
|
θ1 = соs 2θ(ω); |
|
|
|
|
|
|||
|
2 |
1 |
|
|
2 z 2 |
|
. |
|
|
||
|
K 2 |
*16B2 K 2 |
|
|
|
||||||
|
|
|
|
( ) |
|
|
|||||
В точке пересечения построенных зависимостей находится частота автоколебаний ω.
Амплитуду автоколебаний определяем подстановкой найденного значения ω в выражение (1.19). Потери на поиск, согласно формуле (1.16), составляют
δ= KA0 2 . 2
Устойчивость найденного предельного цикла можно оценить приближенным методом. Пусть коэффициент усиления разомкнутой системы по первой гармонике равен
K1( A0 , ) B1K () .
A0
Задаваясь значениями А0, можно построить графические зависимости фазового сдвига разомкнутой системы от частоты ω, Частота ω = ω0, при которой θс(ω) = -2π, и будет частотой автоколебаний. При этом оказывается, что ω0 является функцией А0 и K1( А0, ω) тоже является функцией А0. Значение амплитуды предельного цикла A01 может быть найдено из условия
K1( А0, ω)=1.
Варьируя A01 на небольшую величину, δА0, можно оценить устойчивость предельного цикла. При увеличении A01 на величину δА0 функция K1( А0, ω(А0)) в системе, имеющей устойчивый предельный цикл, должна уменьшаться. В противном случае система имеет неустойчивый предельный цикл, так как общий коэффициент усиления не должен быть больше единицы. Условия устойчивости предельного цикла
|
|
|
|
|
|
|
|
f A , ( A ) |
0. |
||
|
|||||
A0 |
0 |
0 |
|
|
|
|
|
|
A0 A01 |
|
|
1.4. Экстремальные системы автоматического управления с принудительным поиском
экстремума
1.4.1. Получение информации о знаке и величине отклонения от экстремума
39
38
ВЭСАУ с принудительным поиском экстремума (ЭСАУ
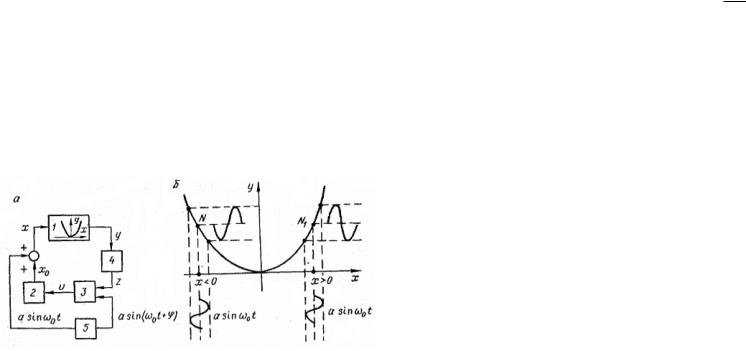
смодуляцией) пробное движение, необходимое для получения информации о знаке и величине отклонения от экстремума, отлично от основного, но производится одновременно с ним. Структурная схема ЭСАУ с модуляцией приведена на рис. 1.7, а. Поисковые колебания синусоидальной формы, генерируемые внешним источником 5, поступают совместно с рабочим сигналом на вход объекта управления 1 и на ДПЭ 3. Сигнал у с выхода объекта управления поступает на избирательный фильтр 4, пропускающий сигнал с частотой поисковых колебаний. С выхода фильтра сигнал поступает на ДПЭ, который управляет работой исполнительной части системы 2.
Сигнал х на входе объекта равен
х=х0+а sin ω0t, |
(1.24) |
где а и ω0 — амплитуда и частота пробного сигнала. |
|
Полагая, что амплитуда а невелика, а х0 не |
успевает |
существенно измениться за период пробного сигнала Т0=2π/ω0, можно, анализируя фазу и частоту пробного движения, определить направление движения к экстремуму.
Рис. 1.7. Структурная схема ЭСАУ с модуляцией (а) и эпюрами сигналов (б).
40
Из рис. 1.7,б видно, что при x0<0 изображающая точка на характеристике объекта находится в положении N. В результате пробный сигнал, проходя через объект управления, изменяет фазу на 180°, т. е. сигнал на выходе находится в противофазе с входным. Для случая x0>0 пробный сигнал на выходе и входе объекта имеет одну и ту же фазу. Таким образом, по сдвигу фаз пробного движения на выходе объекта можно установить, в какую сторону необходимо двигаться: то
ли |
dx0 |
>0 и движение надо осуществлять вправо, чтобы |
|
dt |
|||
|
|
достигнуть экстремума, то ли dx0 <0, и движение необходимо dt
осуществлять влево. При x0=0 на выходе объекта появляются колебания двойной частоты 2ω0, а колебания частоты ω0 вообще отсутствуют.
Следовательно, ДПЭ в данной системе можно выполнить в виде фазового дискриминатора или фазочувствительного выпрямителя. На выходе ДПЭ появляется, кроме переменной составляющей, еще и постоянная составляющая, знак которой определяется тем, синфазна или противофазна составляющая величина у частоты ω0 с пробным синусоидальным сигналом.
1.4.2. Динамические свойства экстремальной системы автоматического управления с принудительным
поиском экстремума
На схеме рис. 1.7, а приведен один из возможных вариантов ДПЭ в виде множительного звена, на вход которого поступает составляющая частоты ω0, выделяемая фильтром 4 из сигнала у, и опорный сигнал с генератора пробного сигнала вида a sin (ω0t+θ).
Фаза θ опорного сигнала подбирается в зависимости от фазы, определяемой фильтром 4. Например, если фильтр 4
41
выполнен в виде дифференциатора, то на его выходе появляется величина bcosω0t, и, значит, опорное напряжение должно также иметь вид acosω0t, т. е. фазовый сдвиг должен быть равен π/2.
Сигнал на выходе множительного звена
U=ab cos2ω0t = ab2 (1+cos2 ω0t)
имеет постоянную составляющую U0= ab2 , знак которой
зависит от знака b. Следовательно, величина x0 на выходе исполнительной части, роль которой играет интегрирующее
звено с передаточной функцией - Kp0 , начинает изменяться в
том или другом направлении в соответствии со знаком b. Проанализируем работу ЭСАУ (см. рис. 1.7, а). Согласно
выражению (1.24),
|
2 |
|
|
2 |
|
a2 |
|
|
a |
|
|
|
y K |
|
x |
|
|
|
2ax sin t |
|
cos2 |
t . |
(1.25) |
||
|
|
|
|
|||||||||
|
|
|
0 |
|
2 |
0 |
0 |
2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Составляющая частоты ω0 этого сигнала равна
y1 K 2 * 2ax0 sin 0t .
Если сигнал z на выходе фильтра 4 пропорционален производной от y1, то в этом случае
U=K1 t y1 a cos 0t K1 0 K 2 * 2a2 x0 cos2 0t
K1 0a2 K 2 x0 K1 0a2 K 2 x0 cos2 0t
Сучетом интегрирующего звена имеем
dxdt0 K0U K0 K1 0a2 Kx0 K0 K1 0a2 K 2 x0 cos2 0t
42
При достаточно большом значении 2 ω0 можно не учитывать влияние этой составляющей на поведение сигнала x0, ибо она будет слабо пропускаться интегратором, вызывая небольшое высокочастотное дрожание на его выходе.
В результате получим уравнение изменения величины x0:
T |
dx0 |
|
x |
0, |
|
|
|
|
(1.26) |
|||
|
|
|
|
|
||||||||
|
dt |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
|
|
|
||
|
T= |
|
|
1 |
|
|
|
|
. |
|
||
|
|
|
|
|
|
|
||||||
|
K |
K |
a2 K 2 |
|
||||||||
|
|
|
0 |
|
1 |
0 |
|
|
|
|
|
|
Решение уравнения (1.26) будет иметь вид |
|
|||||||||||
|
|
|
|
|
|
|
|
e |
t |
|
||
|
|
(x ) |
|
|
|
|
|
|||||
|
x |
t 0 |
T |
|
||||||||
0 |
|
|
0 |
|
|
|
|
|
||||
затухающей экспоненты, которая стремится к требуемому значению x0= 0, соответствующему минимуму величины у.
Потери на поиск, согласно выражению (1.25), будут равны
yср Ka 2 . 2
Они уменьшаются с уменьшением амплитуды пробных движений а. Однако это приводит к затягиванию процесса выхода к экстремуму, так как возрастает постоянная времени Т переходного процесса системы.
ЭСАУ с модуляцией обладают более высокой помехоустойчивостью, определяемой наличием множительного звена и интегратора, реагирующего лишь на средние составляющие на выходе множительного звена.
1.5. Дискретно-шаговые экстремальные системы автоматического управления
43
Дискретно-шаговые ЭСАУ характеризуются относительной простотой измерения выходной координаты как разности двух последовательных значений. Эти системы работают, используя информацию о градиенте показателя качества, получаемого с помощью пробного движения. Работа их осуществляется циклами. В начале каждого цикла измеряется и запоминается показатель качества Ii. Затем после небольшого изменения независимых переменных, называемых пробным, движением (пробным шагом), вновь определяются показатель качества Ii+1 и градиент.
I Ii 1 Ii .
Принцип работы такой системы поясняется на простейшем примере, когда показатель качества I зависит от одной переменной. Значению параметра x1 на входе объекта соответствует показатель качества I1. Следует иметь в виду, что I1 устанавливается спустя некоторое время после подачи на вход значения x1. Затем величине x1 дается приращение ∆x1, в результате чего значение
x2= x1+∆x1,
и объект уже характеризуется значением I 2. В общем случае
xi+1= xi+∆xi+1
До тех пор, пока ∆Ii+1>0, происходит увеличение х. При ∆Ii+1<0 необходимо уменьшение величины х до получения экстремума I.
Требуемое изменение х, производимое на основании результатов каждого измерения, в сторону, противоположную
44
вектору градиента, называется рабочим движением (рабочим шагом), Величина рабочего шага пропорциональна модулю градиента:
yi+1 - yi = - Кп mod Ii
В общем случае дискретно-шаговая ЭСАУ является нелинейной импульсной САУ, и анализ динамических свойств ее может производиться на основе z-преобразований.
Процесс минимизации для объекта с характеристикой, определяемой выражением (1.3) при а =1 и ∆x=const, производится следующим образом:
∆y= yi+1 - yi =(xi+∆x)2- xi2=2 xi∆x+∆x2.
Рабочее перемещение величины х определяется соотношением
xi K yi |
|
при постоянной величине K>0. Значение xi+1 |
после |
рабочего движения равно |
|
xi+1= xi+γ xi= xi-K∆yi= xi(1-2K∆x)- K∆x2 |
|
или |
|
xi+1= xiβ-K∆x2 |
(1.27) |
где |
|
1 - 2К∆х=β |
(1.28) |
45
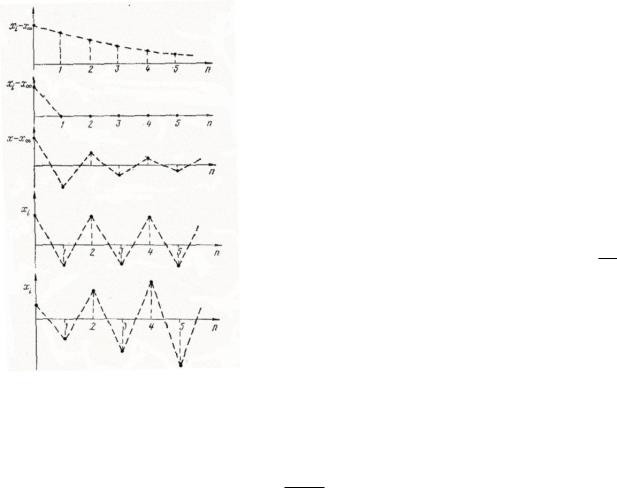
Рис. 1.8. Графики переходных процессов.
Из выражения (1.27) следует, что, зная исходное значение x0, можно определить значение xп, т. е.
xn n x0 K x2 (1 2 ... n 1 ) n x0 K x2 1 n 1
.
Рассматривая предел, к которому стремится хп при n , можно определить, устойчива ЭСАУ или нет. Наличие такого предела и говорит об устойчивости.
Рассмотрим несколько случаев, учитывая, что β<l [см.
формулу (1.28)]. .
1. 0< β <1, при этом хп монотонно убывает:
46
x lim x |
|
|
K x2 |
. |
||
n |
|
|
||||
|
n |
|
1 |
|
|
|
|
|
|
|
|||
2. β = 0. В этом случае величина
x x1 K x2
Это означает, что переходный процесс в ЭСАУ заканчивается в кратчайший срок при п=1.
3. - 1< β <0, при этом
x lim x |
|
|
|
K x2 |
|||
n |
|
|
|
|
|||
|
n |
|
1 |
|
|
||
|
|
|
|||||
а знаки ( xi x ) чередуются с ростом i, т. е. процесс носит колебательный характер.
1
4. β = -1, т. е. K= x . В этом случае при четном п хп=хо,а
при нечетном п xn =- хо —K∆x2, т. е. процесс не затухает и не возрастает, что соответствует границе устойчивости.
5. β < -1. Процесс при этом неустойчив, так как значения
хувеличиваются с ростом i, а их знаки чередуются. Качественные графики переходных процессов для
рассматриваемых случаев приведены на рис. 1.8.
1.6. Беспоисковые системы с моделями, самонастраивающиеся по динамическим
характеристикам объекта управления
1.6.1. Общие сведения
Беспоисковые СНС с настройкой по динамическим характеристикам объекта управления можно разделить на три класса.
1. СНС, в которых используется информация о частотных характеристиках: В этих системах перестройка параметров УУ осуществляется в соответствии с принятым критерием качества на основании измерений амплитудно-
47
частотной и фазо--частотной характеристик системы или одного объекта.
2.СНС, в которых используется информация о временных характеристиках. К такому классу относятся системы с непосредственным контролем импульсной переходной функции, системы, в которых критерием качества является число перемен знака импульсной переходной функции, системы с оценкой затухания по разности положительной и отрицательной площадей импульсной переходной функции и др. К этому же классу относятся системы с моделями, которые могут применяться либо для определения параметров объектов, либо для создания желаемого эталона системы.
3.СНС, в которых используется информация о процессах на границе устойчивости.
Ниже рассматриваются системы с моделями. В таких системах получение информации о течении управляемого процесса, динамических характеристиках объекта управления, действующих на систему внешних возмущениях можно обеспечить с помощью моделей с желаемыми характеристиками. Могут использоваться модели не только с постоянными, обеспечивающими стабилизацию критерия качества параметрами, но и с настраиваемыми параметрами, что позволяет обеспечивать оптимизацию критерия качества системы в условиях изменения как характеристик объекта управления, так и входных сигналов.
Далее рассматриваются системы с моделью и настройкой параметров управляющего устройства по динамическим характеристикам объекта управления. Задачей таких систем является стабилизация динамических характеристик в соответствии с их требуемыми значениями, задаваемыми эталонной моделью; при этом цепь настройки может выполняться сигнальной, параметрической и комбинированной. В первом случае за счет сигнала цепи настройки непосредственно изменяется сигнал коррекции в
цепи управляющего устройства, а во втором - изменяется какой-либо параметр управляющего устройства (коэффициент усиления, постоянная времени).
Системы с моделями находят применение при управлении летательными аппаратами и другими объектами с изменяющимися параметрами.
1.6.2.Принцип действия самонастраивающейся системы с параметрической настройкой
Схема системы, в которой настройка осуществляется изменением коэффициента усиления управляющего устройства УУ, представлена на рис. 1.9.
Отклонения параметров объекта управления от их желаемых значений оцениваются косвенным путем в виде сигнала рассогласования ε1, возникающего между выходом системы и выходом модели. Эта информация используется для настройки параметров изменяемой части УУ, которая может располагаться либо в прямой цепи, либо в цепи обратной связи системы, либо одновременно в обеих цепях, с целью сведения ошибки или ее функции к минимально достижимому значению в пределах диапазона настройки параметров.
Критерием самонастройки является степень соответствия выхода системы выходу эталонной модели. Организация самонастройки производится за счет основного управляющего сигнала x.
49
48
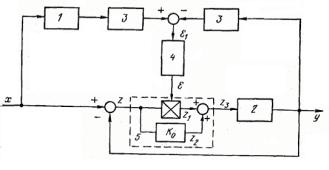
Рис. 1.9. Структурная схема СНС с эталонной моделью: 1 - эталонная модель с передаточной функцией в
разомкнутом состоянии KМ(p), характеризующая требуемый режим работы; 2 - объект управления с передаточной функцией Kc(p), параметры которого изменяются непредвиденным образом в широких пределах; 3 - устройства для определения модулей сигналов; 4 - цепь настройки; 5 - управляющее устройство.
Устройства для определения модулей сигналов выполняют функции логического устройства, обеспечивающего независимость знака сигнала рассогласования ε1 от знака входного сигнала, так как направление подстраиваемого параметра должно определяться направлением изменения параметров объекта управления.
Структура и параметры цепи настройки системы выбираются из условия обеспечения высокого быстродействия и максимально допустимого приближения выходов системы и модели в переходном и установившемся режимах.
В ряде случаев целесообразно такое построение цепи настройки, при котором перестройка коэффициента усиления осуществляется в зависимости от ошибки ε1 по закону
tu
K (t) K0 Ku 1dt K 1 K 1,
t0
где Kо, Ku, Kε, K — постоянные коэффициенты.
Интегральная составляющая улучшает качество настройки в установившемся режиме, а составляющие по положению и по скорости улучшают динамику переходного режима. Вместе с тем чрезмерное добавление производных от ошибки значительно усложняет механизм настройки, делая его чувствительным к шумам, генерируемым даже в самом контуре самонастройки.
Характеристика эталонной модели может быть найдена в результате анализа как среднее характеристик системы во всем диапазоне их изменения.
Близкой к идеальной (когда в качестве сигнала выхода модели используется входной сигнал х) будет модель тогда, когда контур самонастройки используется как корректирующий. В большинстве случаев оказывается возможным применение упрощенной модели системы в виде колебательного, или апериодического звена.
Параметры эталонной модели должны выбираться с учетом ограничений координат реальной системы. Для этой цели можно, например, воспользоваться методом интегральных квадратичных оценок.
В рассматриваемой системе перестройка коэффициента усиления УУ осуществляется в соответствии с уравнением Kу=Kо+ε, где Kо=const и в дальнейшем принимается равным единице, а ε - перестраиваемая составляющая (ε=Kε1,
ε=Kε1+Ku 1dt , ε = Ku 1dt и т.д.).
Динамические свойства СНС описываются нелинейным' уравнением с переменными коэффициентами:
k |
|
ci (t) y(i) b(t)z3 |
- объект управления; |
i 0 |
|
z3=Kyz=Ky(x-y) |
- закон управления; |
50 |
51 |