

Учебное пособие 2015
.pdf1.9.2. Самонастраивающаяся по входному сигналу следящая система, основанная на использовании двух,
частотных фильтров
В СНС с заданной структурой и замкнутым контуром настройки оптимизация системы может осуществляться на основе измерения показателей, косвенно определяющих характеристики задающих воздействий и помех. Одним из таких показателей является изменение формы спектральной плотности суммарной ошибки при отклонениях параметров основной системы от их оптимальных значений вследствие изменения отношения уровней сигнал/шум на входе системы. Реализация указанного принципа основана на применении частотных фильтров.
Основные расчетные соотношения приведем для случая, когда на вход следящей системы поступают стационарный случайный задающий сигнал X(t) и помеха f(t) типа белого шума. Корреляция между сигналом и помехой отсутствует. Спектральные плотности задающего сигнала и помехи соответственно равны
Sx ( ) K 2 ; S f ( ) = a2 = const.4
Оптимальная передаточная функция, найденная по методу Винера — Колмогорова, для указанных условий равна
где
T |
|
2a |
; |
|
|
K |
|
|
|||||
K |
a |
||||||||||||
|
|
|
|
|
|
|
|
||||||
или |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
K0 опт ( p) |
|
|
|
2p 2 |
|||||||||
|
|
|
|
|
, |
||||||||
|
|
|
|
|
|||||||||
|
|
||||||||||||
|
|
|
p2 2p 2 |
||||||||||
|
|
|
|
K |
|
|
|
где |
|
|
- отношение сигнал/помеха. |
||||
a |
|||||||
|
|
|
|
|
|
||
Средний квадрат ошибки определяется по формуле
|
|
2 |
|
x2 |
|
|
f2 |
1 |
|
|
|
|
|
|
|
K 2 |
|
|
|
|
|
|
|
|
|
|||||||||||||
Z |
Z |
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
||||||||||||||||||
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 j |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
1 |
|
a2 2 2 2 4 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|||||||||||||||||||
|
|
|
2 |
|
|
1 2 |
|
|
|
2 |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
2j 2 |
|
||||||||||||||||||||||||||||||||
|
|
|
a2 |
|
2 |
3 |
4 |
|
|
|
|
K 2 |
|
|
3a2 |
. |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
3 |
|
|
|
2 3 |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
2 2 |
|
|
|
|
|||||||||||||||||||
Оптимальное значение параметра γ найдем из условия
|
|
2 |
|
K 2 3 |
2 |
|
3a2 |
|||||||||||
Z |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0, |
|||
|
|
|
|
6 |
|
|
|
|
|
|||||||||
2 |
2 |
2 2 |
||||||||||||||||
|
|
|
|
|
||||||||||||||
т. е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
K |
|
|
|
|
|
|||||||
|
|
|
опт |
|
|
|
|
|
. |
|||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Последнее выражение показывает, что оптимальное значение параметра γопт будет являться функцией отношения сигнал/шум.
При отклонении параметров γ основной системы от их оптимальных значений γопт спектральная плотность суммарной ошибки системы изменяется в соответствии с выражением
|
|
|
|
2 S |
|
|
( ) a2 |
опт4 4 |
. |
|
S |
( ) |
1 K |
|
( ) |
( ) S |
|
||||
|
|
|
||||||||
z |
|
|
0 опт |
|
x |
|
f |
|
4 4 |
|
|
|
|
|
|
|
93 |
|
|
|
|
92
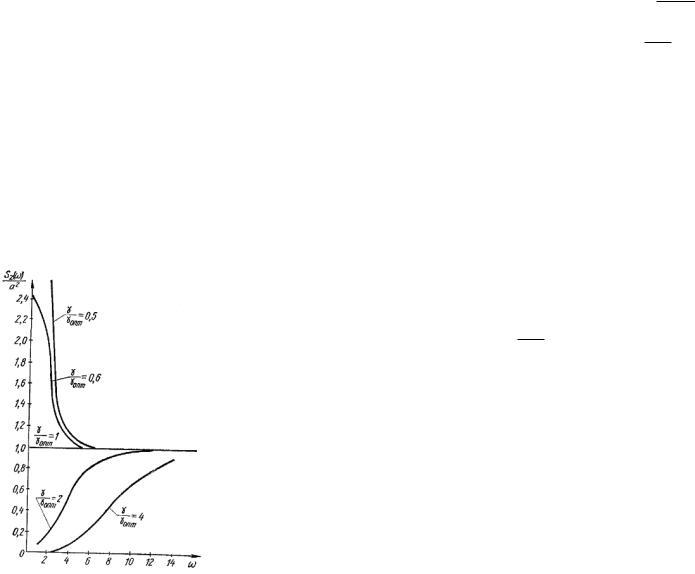
Для оптимальной системы γ = γопт и Sz(ω) = a2 = const, т. е. в оптимальной системе Sz(ω) — спектральная плотность на
входе управляющего устройства равна спектральной плотности помехи.
Спектральная плотность суммарной ошибки с увеличением частоты возрастает при γ > γопт и падает при γ <
γопт . На рис. 1.23 |
приведены зависимости |
Sz |
( ) |
для |
||
a2 |
||||||
|
|
|
|
|||
|
|
|
|
|
||
различных значений |
|
. |
|
|
|
|
опт |
|
|
|
|||
Используя разность усредненных напряжений с выходов двух фильтров с различными частотными характеристиками, можно построить схему самонастраивающейся по входному сигналу системы (рис. 1.24). Сигнал суммарной ошибки Z(t) системы поступает на вход частотных фильтров Ф1 и Ф2.
Рис. 1.23. Зависимость Sz ( ) для различных значений a2
.
опт
Исполнительный элемент подстраивает параметры управляющего устройства основной системы до тех пор, пока разность усредненных квадратичных напряжений на выходе фильтров не будет равна нулю. Это будет иметь место при выполнении условия оптимальности, т, е. при γ = γопт В качестве фильтров Ф1 и Ф2 можно использовать апериодические звенья с различными постоянными времени:
Ф1 |
( p) |
|
Kф1 |
; |
Ф2( p) |
|
Kф2 |
. |
|
Tф1 p |
|
Tф2 p |
|||||
|
1 |
|
1 |
|
||||
Вместо квадраторов в контуре настройки могут использоваться выпрямители (модули). Усреднение разности ζ12— ζ22 осуществляется с помощью фильтра низких частот Ф0. Звено К0 - исполнительное устройство с передаточной
функцией pT1 3 .
Достаточно подробно выбор структуры частотных фильтров рассматривается в работе.
94 |
95 |
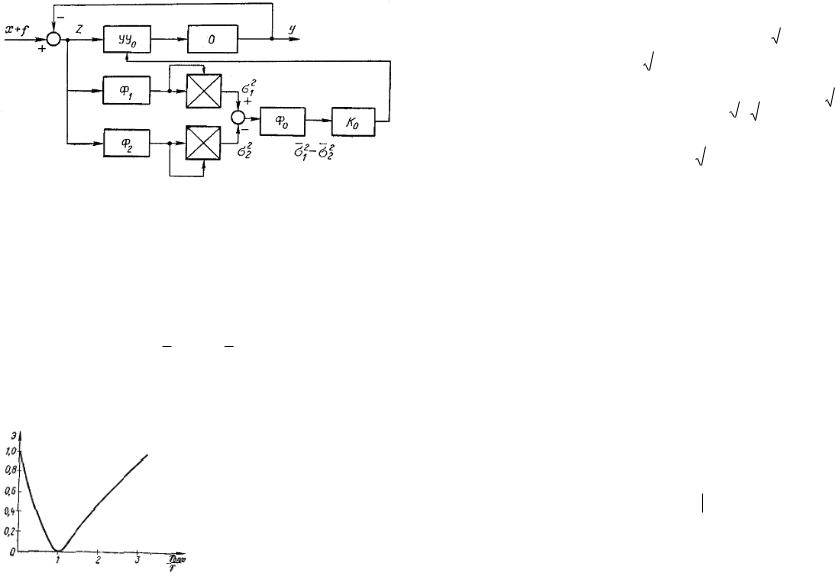
Рис. 11.24. Структурная схема системы с двумя частотными фильтрами.
Эффективность самонастройки можно оценить по соотношению
Э 1 |
Z |
02 |
, |
|||
|
|
|
|
|||
Z |
2 |
|||||
|
|
|||||
где Z02 и Z 2 — соответственно
суммарная ошибка оптимальной системы и системы без самонастройки.
Так как
|
опт |
|
|
Рис. 1.25. Зависимость Э=f |
|
. |
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
3 4 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Z 2 |
|
|
a2 |
|
, |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
2 3 |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
а при γопт = |
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Z |
2 |
a2 |
a2 |
2 , |
|
|
|
|||||||||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
2 |
2 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Э 1 |
|
|
4 |
3 |
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
. |
||||||||||
2 |
3 |
4 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
1 |
|
опт |
|
|
3 |
|
опт |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
4 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Из рис. 1.25 следует, что в рассматриваемом случае самонастройка эффективна при двукратном и более изменениях параметра.
В общем случае, когда шум не является белым и спектральная плотность суммарной ошибки Sz(ω) в оптимальной системе зависит от частоты, для построения СНС можно использовать ряд схем с частотными фильтрами,
пропустив, например, сигнал суммарной ошибки через дополнительный фильтр с передаточной функцией, определяемой соотношением
|
( j ) |
|
|
a2 |
||
Kд |
|
|
|
. |
||
|
|
|
||||
|
|
|
|
Sz |
( ) |
|
На выходе фильтра получим сигнал, спектральная
97
96

плотность которого не зависит от частоты при оптимальных параметрах основной системы Sz(ω)=a2. Такой сигнал можно использовать для построения СНС с двумя частотными фильтрами. Метод частотных фильтров пригоден для построения СНС при наличии ограничений на координаты системы, при Kпр ≠ 1 и при наличии корреляции между задающим воздействием и помехой.
1.9.3. Беспоисковые градиентные самонастраивающиеся системы
В САУ, у которых изменяются характеристики входных сигналов и параметры объекта управления, для получения требуемого качества можно применять настройку, основанную на методе градиента.
Критерием качества работы системы является функция
I = f(ε), |
(1.74) |
где
(t) yм (t) y(t);
y(t) — выходная величина системы;
yм(t) — выходная величина эталонной модели с желаемыми динамическими свойствами и общим входом с основной системой.
При изменении какого-либо параметра системы αi функция ошибки (1.74) изменяется. Настраиваемый параметр βi необходимо изменять так, чтобы достигнуть экстремума I.
Найдя производную
I |
|
f ( ) |
* |
|
(i = 1, 2,…, n) |
|
i |
|
i |
||||
|
|
|
как меру отклонения от желаемой рабочей точки и учитывая, что ум не зависит от параметров βi, получим
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
. |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
i |
|
|
|
|
|
|
|
|||||
|
|
|
Контур настройки |
должен |
синтезироваться так, |
чтобы |
||||||||||||||||||||||||
величина |
βi менялась |
пропорционально |
|
I |
|
или |
чтобы |
|||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
i |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
величина |
|
d i |
была |
пропорциональна |
|
I |
|
. |
Последнее |
|||||||||||||||||||||
|
|
|
i |
|||||||||||||||||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
достигается |
при определении |
|
|
частных производных |
I |
в |
||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||
|
|
i |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соответствии с выражением |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
dI dt |
. |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
d i |
dt |
|
|
|
|
|
|
|
||||||
|
|
|
Если |
изменять |
βi |
с известной |
|
постоянной |
скоростью |
|||||||||||||||||||||
|
d i |
=const, то скорость |
|
dI |
изменения I, |
вызванного этим |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
изменением |
настройки, |
будет |
|
мерой искомой |
производной |
|||||||||||||||||||||||||
|
I |
, т. е., измеряя скорость |
|
dI |
можно судить о величине |
|||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
. Недостатком |
данного |
|
|
|
|
метода |
|
|
|
поочередного |
||||||||||||||||||
|
i |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
определения |
|
|
является тем большее время настройки, чем |
|||||||||||||||||||||||||||
|
i |
|||||||||||||||||||||||||||||
99
98
больше число настраиваемых параметров, и худшая помехозащищѐнность в связи с наличием в схеме дифференциаторов, увеличивающих относительный уровень высокочастотных помех на выходе вычислителя.
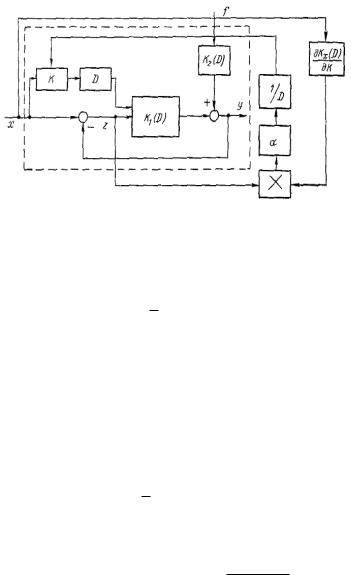
Рассмотрим задачу самонастройки коэффициента преобразования цепи разомкнутого цикла комбинированной САУ (рис. 1.26, пунктир). Уравнение динамики системы имеет вид
1 K1 (D) z 1 KDK1 (D) x K2 (D) f
или
z Kx (D)x K f (D) f
где
K x |
(D) |
1 KDK1 (D) |
; |
K f |
(x) |
|
K2 |
(D) |
; |
||
|
K1 |
|
|
K1 (D) |
|||||||
|
|
1 |
(D) |
|
|
1 |
|
||||
х - задающее воздействие; f - помехи;
z - ошибка:
К - коэффициент преобразования цепи разомкнутого цикла.
Рис. 1.26. Структурная схема самонастраивающейся комбинированной следящей системы.
Показателем качества является интегральная квадратичная ошибка
Z 2 z 2 (t)dt.
Очевидно, существует оптимальное значение К, при котором имеет место минимальная квадратичная ошибка. Если задающее воздействие изменяется (например, частота ω при x(t)=a*sin ω t), то возникает необходимость в подстройке коэффициента преобразования К.
Управляющий сигнал контура самонастройки равен частной производной показателя качества по настраиваемому параметру:
Z 2 2z Kx (D) x.
K K
Величину
Kв (D) K x (D) K1 (D)DK 1 K1 (D)
называют вспомогательным оператором, а систему — СНС со вспомогательным оператором.
100 |
101 |
Особенностью таких систем является использование математической модели объекта или его части. Возможны схемы и с физической моделью объекта, с определением градиента на базе теории чувствительности, с использованием взаимно корреляционных функций, с самонастраивающейся моделью объекта.
1.9.4. Система, самонастраивающаяся по входному сигналу на минимум суммарной ошибки
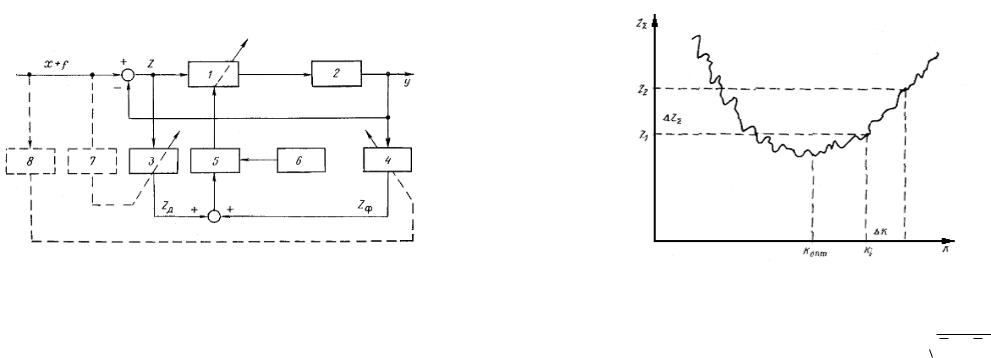
Вариант структурной схемы системы с настройкой по входному сигналу, с заданной структурой и замкнутым контуром настройки, обеспечивающей минимум суммарной ошибки в широком диапазоне изменения характеристик полезного сигнала и помехи, приведен на рис. 1.27. Система представляет собой комбинацию:
Рис. 1.27. Схема самонастраивающейся по входному сигналу системы:
1 — управляющее устройство; 2 — объект управления; 3
— низкочастотный фильтр для измерения динамической ошибки; 4 — высокочастотный фильтр для измерения флуктуационной ошибки; 5 — цепь настройки; 6 —
логическое устройство совместно с датчиком пробных сигналов, управляющее работой цепи настройки; 7 — дополнительный самонастраивающийся фильтр, идентичный по структуре фильтру, измеряющему динамическую ошибку системы; 8 — дополнительный самонастраивающийся фильтр, идентичный по структуре фильтру, измеряющему флуктуационную ошибку системы.
а) основной следящей системы с заданной структурой, параметры которой настраиваются с целью обеспечения минимума суммарной ошибки;
б) вспомогательных самонастраивающихся систем, служащих для оптимального выделения динамической и флуктуационной составляющих ошибки в основной системе.
Рис. 11.28. Определение экстремума ZΣ суммарной ошибки.
Поиск минимума суммарной ошибки Z 
 Zд2 Zф2 осуществляется по циклам, состоящим из пробного и рабочего
Zд2 Zф2 осуществляется по циклам, состоящим из пробного и рабочего
102 |
103 |

движений следящей системы. В начале каждого цикла логическое устройство выдает команду в цепь настройки на запоминание величины суммарной ошибки (рис. 1.28) и на осуществление пробного движения в системе, заключающегося в небольшом одностороннем изменении настраиваемого параметра K. Затем происходит сравнение запомненного и полученного в результате пробного движения значений суммарной ошибки.
Полученное в результате сравнения разностное значение ошибки Z = Z1—Z2 используется для требуемой настройки параметра, называемой рабочим движением. Знак и величина разностного значения ошибки определяют соответственно направление и скорость изменения параметра.
Частотные характеристики фильтров, выделяющих значение динамической и флуктуационной составляющих ошибки системы, определяются из следующих соображений.
Полагая, что на вход системы с известной частотной характеристикой K(jω) действуют статистически независимые полезный сигнал X со спектральной плотностью Sх(ω) и помеха f со спектральной плотностью Sf(ω), определяем спектральные плотности выходного сигнала Sy(ω) и сигнала ошибки Sz(ω):
S y ( ) K0 ( j ) 2 Sx ( ) S f ( ) ;
Sz ( ) Kz ( j ) 2 Sx ( ) S f ( ) ,
где K0(jω) и Kz(jω) - частотные характеристики системы в замкнутом состоянии и по ошибке.
Спектральные плотности сигналов на выходе фильтров, выделяющих динамическую Szд(ω) и флуктуационную Szf(ω) ошибки системы, находятся из выражений:
S zд ( ) S z ( ) |
|
K ф.д ( j ) |
|
2 ; |
(1.75) |
|
|
||||
104 |
|
|
|
|
|
Szf ( ) S y ( ) |
|
Kф.ф ( j ) |
|
2 ; |
|
(1.76) |
|
|
|
||||
|
|
где |
Kф.д ( j ) |
и |
||
Kф.ф ( j ) |
— |
искомые |
||||
частотные характеристики фильтров.
Учитывая, что спектральные плотности сигналов динамической и флуктуационной ошибок в системе равны
S |
|
( ) S |
( ) |
|
K |
( j ) |
|
2 ; |
|
(1.77) |
|||||||
|
|
|
|
||||||||||||||
д |
|
x |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
S |
ф |
( ) S |
f |
( ) |
|
K |
( j ) |
|
2 |
, |
(1.78) |
||||||
|
|
||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|||
можно определить требуемые частотные характеристики фильтров, приравняв соответственно выражения (1.75) и (1.77), а также (1.76) и (1.78). В результате находим:
K 2 |
( ) |
K |
ф.д |
( j ) |
ф.д |
|
|
|
K 2 |
( ) |
K |
ф.ф |
( j ) |
ф.ф |
|
|
|
2
2
|
Sx ( ) |
|
Sx ( ) S f ( ) |
||
|
|
S f ( ) |
|
|
|
|
Sx ( ) S f ( ) |
|
; (1.79)
. (1.80)
Из формул (1.79) и (1.80) следует, что для оптимального выделения динамической и флуктуационной составляющих ошибки при широком диапазоне изменения характеристик входных воздействий рассматриваемые фильтры должны в соответствии с этими изменениями автоматически перестраивать свои параметры.
Для случая широкополосной помехи типа белого шума самонастраивающиеся фильтры, согласно выражениям (1.79) и (1.80), можно выполнить наиболее просто по методу двух частотных фильтров, описанному в предыдущем параграфе. Однако из-за того, что на входы фильтров поступает помеха,
105
преобразованная следящей системой, а не типа белого шума, необходимо ввести два дополнительных фильтра (см. формулы (1.79) и (1.80) и рис. 1.27), самонастраивающихся по методу двух частотных фильтров. На входы дополнительных фильтров поступают те же полезный сигнал и помеха, что и на вход СНС, а сигналы с выхода цепей настроек дополнительных фильтров используются для настройки параметров основных фильтров по разомкнутому циклу.
1.10. Самонастраивающиеся системы с экстремальной настройкой корректирующих устройств
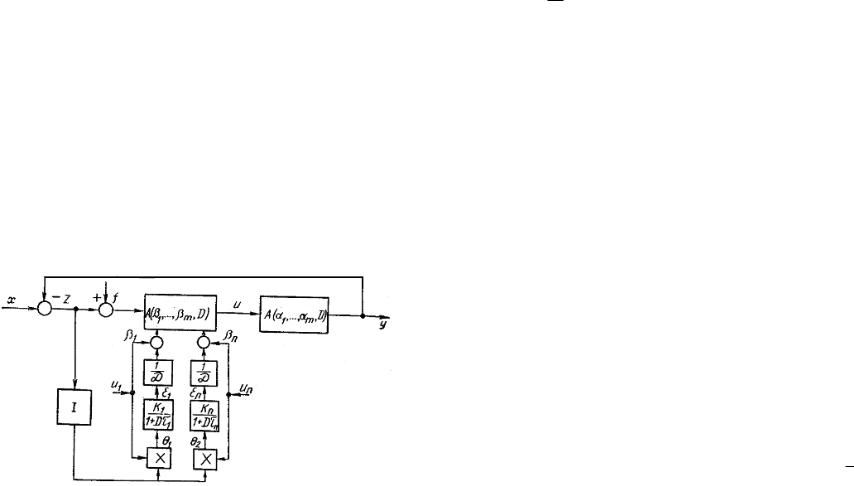
Схема СНС, обеспечивающая оптимальное значение показателя качества при изменении параметров объекта управления и внешних воздействий, приведена на рис. 1.29.
Рис. 11.29. СНС с экстремальной настройкой корректирующих устройств.
Объект управления содержит m переменных параметров α1, ... , αт и характеризуется оператором А (α1, ... , αт, D), где
106
D= dtd . Корректирующее устройство (изменяемая часть УУ)
имеет m настраиваемых параметров β1, ... , βm и описывается оператором A (β1, ... , βm, D). Задающее воздействие на входе системы x(t) произвольного, заранее неизвестного вида является плавным, медленно меняющимся по сравнению с процессами в основном контуре управления сигналом. Случайное возмущение на входе системы f(t).
Уравнения процессов основной цепи управления:
y A( 1 ,..., m |
, D)u; |
|
|
u A( 1 ,..., m |
|
|
|
, D) Z f ; |
(1.81) |
||
|
|
|
|
Z x y. |
|
|
Цепь настройки включает функциональное устройство для определения показателя качества управления I, устройство для определения экстремума, показателя качества управления и исполнительные элементы, обеспечивающие настройку параметров с помощью сигналов ε1, ..., εn.
Характер функционального устройства и устройства определения экстремума зависит от выбранного показателя качества и метода определения его экстремума.
При поставленных выше условиях целесообразной является оценка качества по среднему квадрату ошибки управления. В таком случае устройство для определения оценки качества управления I будет представлять собой квадратор в сочетании с апериодическим звеном, осуществляющим операцию усреднения Z 2 . Уравнение такого устройства будет иметь вид
Z 2 ; |
|
(1.82) |
TD 1 I . |
||
|
|
|
|
107 |
|

Экстремум показателя качества может определяться с помощью нахождения градиента функционала в пространстве параметров β1, ... , βm и настройки параметров с помощью использования синхронных детекторов в цепи настройки. Синхронные детекторы включают множительные устройства для перемножения сигнала I и пробных сигналов ui. Последовательно с ними включаются фильтры — апериодические звенья, усредняющие сигналы Iui. Пробные сигналы ui (i = 1, 2, ... , n) подаются непосредственно в цепи настраиваемых параметров βi (i = l, 2, ... , m). На выходе синхронных детекторов формируются сигналы, содержащие величины, пропорциональные компонентам градиента функционала I по параметрам βi (i = l, 2, ... , m).
Это можно показать, разлагая I(i = l, 2, ... , m) в ряд Тейлора по приращениям Δβ, создаваемым поисковыми сигналами с учетом только членов первого порядка малости относительно Δβ, т. е.
|
|
|
|
n |
I |
|
|
|
I ( 1 , 2 ,..., m ) I ( 01 , 20 ,..., m0 ) |
i , |
(1.83) |
||||||
|
||||||||
|
|
|
|
i 1 |
i |
|
||
где |
|
|
|
|
|
|
|
|
Δβi = ui = Ai sin ωt. |
|
|
|
|||||
Таким образом, |
|
|
|
|
|
|
|
|
|
|
n |
I |
|
|
|
|
|
I ( 1 , 2 ,..., m ) I0 |
Ai sin t, |
(1.84) |
||||||
|
||||||||
|
|
i 1 |
i |
|
|
|
||
где |
|
|
|
|
|
|
|
|
I0 I ( 01 , 20 ,..., m0 ). |
|
|
|
|||||
На выходе k-гo множительного устройства величина |
||||||||
сигнала равна произведению |
|
|
|
|
|
|
|
|
I ( 1 , 2 ,..., m ) Ak sin k t |
|
|||||||
или |
|
|
|
|
|
|
|
|
n |
I |
|
|
|
|
|
|
|
I0 Ak sin k t |
Ai Ak sin k t sin it . |
|
||||||
|
|
|||||||
i 1 |
i |
|
|
|
|
|
||
108 |
|
|
|
|
|
|
|
|
В синхронном детекторе происходит усреднение этой величины по времени. Средние значения sin k t и
sin i t sin k t при i k равны нулю, и только среднее значение произведения sin i t sin k t при i=k равно 1/2, учитывая, что
sin2 k t 12 12 cos2 k t.
На выходе k-го канала синхронного детектора, таким
образом, величина сигнала приближенно равна |
1 |
A |
2 |
I |
, т. е. |
|||
|
|
|
|
|||||
|
|
|
2 |
k |
k |
|
||
|
|
|
|
|
|
|
|
|
пропорциональна производной |
I |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
k |
|
|
|
|
|
|
|
Уравнения цепей настройки при непрерывной настройке параметров βi(t) имеют вид:
i |
Iui ; |
|
|
|
( i D 1) i |
Ki i |
|
(1.85) |
|
; |
||||
|
i ui |
, |
|
|
i |
|
|
||
где i — постоянные времени фильтров.
Как следует из выражения (1.85), скорость изменения параметров i пропорциональна измеренным компонентам градиента.
Врезультате контур самонастройки задает и поддерживает такие значения параметров корректирующего устройства, при которых показатель качества близок к своему экстремальному значению.
Вкачестве пробных сигналов ui (i = 1, 2, ... , n) для определения компонентов градиента I могут применяться не только гармонические, но и случайные сигналы.
109
Достоинствами метода синхронного детектирования, используемого для определения частных производных показателя качества по настраиваемым параметрам, являются быстрота вычисления градиента (все частные производные определяются здесь параллельно) и высокая помехоустойчивость.
Рис. 1.30. Схема к примеру 11.4. Синхронные детекторы не пропускают на выход все
некоррелированные с поисковым сигналом помехи в той же мере, что и поисковые сигналы соседних каналов.
На основании уравнений (1.81) — (1.85) возможна оценка ошибки управления Z2 при различных режимах настройки параметров и оценка требований к характеристикам и параметрам цепей настройки Кi и ηi - (i = l, 2, ... , п) для обеспечения требуемой точности управления в установившемся и переходном режимах.
Для решения задачи целесообразно применение приближенных методов гармонической и статистической линеаризации.
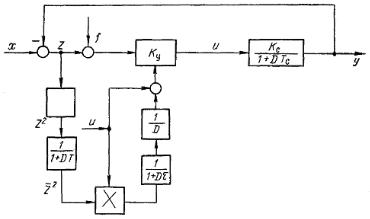
Пример 11.4. Структурная схема системы, в которой экстремум находится по методу градиента, а последний
определяется методом синхронного детектирования, приведена на рис. 1.30. Система имеет один настраиваемый параметр β = Kу — коэффициент усиления. Ошибка управления Z = x - y возводится в квадрат и усредняется фильтром. Фильтр с постоянной времени т обеспечивает усреднение периодического сигнала множительного устройства синхронного детектора.
Помеха f — стационарная случайная функция с mf = 0 типа белого шума Sf(ω) = S0 = const, задающее воздействие x0 = const, параметры объекта Ко и Т0 медленно изменяются во времени.
Определить оптимальное значение коэффициента усиления корректирующей цепи Kу.опт.
Решение. Уравнения основной цепи управления:
Tc D 1 y Kc K y Z f ;
Z=x—y.
Математическое ожидание и дисперсия ошибки управления в установившемся режиме равны:
|
|
|
mz |
|
|
|
|
|
x0 |
; |
|
|
|
|
|
|
|
|
(1.86) |
|
|
|
|
|
|
|
Kc K y |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2 |
|
|
|
2 |
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
|
Kc K y |
|
|
|
|
S |
|
( )d |
K y |
Kc |
S0 |
|
. |
(1.87) |
||||
|
|
|
|
|
f |
|
|
|
|
|
|
|
||||||||
z |
|
Tcj 1 |
|
|
|
|
|
2(1 K |
K |
|
)T |
|
||||||||
|
|
|
|
|
|
|
|
y |
|
|||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
c |
|
||
Качество процесса управления характеризуется показателем
I mz2 z2 I (Kc , K y ,Tc ).
110 |
111 |