

Учебное пособие 2015
.pdfможностями исполнительного механизма. Система не теряет работоспособности в широком диапазоне скоростей дрейфа экстремума (если не нарушаются условия устойчивости обычной линейной следящей системы).
В описанных выше дифференциальных схемах управляющее, воздействие на БРЗ получалось путем сравнения характеристик объекта регулирования (коррелятора) и его модели (дополнительного канала коррелятора с блоком постоянного запаздывания). Однако это не единственный способ создания беспоисковой схемы. При использовании третьего фотодатчика можно также получить два канала с аналогичными характеристиками, сравнение которых дает сигнал рассогласования для управления БРЗ. Схема такой автоматизированной системы для измерения скорости корреляционным методом представлена на рис. 3.12, а.
Выходные сигналы |
обоих каналов R1 и |
R2 |
разностная характеристика |
U R2 R1 (рис. |
3.12,б) |
ничем не отличаются от приведенных на рис. 3.10,б.
Эта схема может быть упрощена, если вычитание сигналов осуществлять после множительных устройств или непосредственно после фотодатчиков (рис. 3.12, в, а).
Временному сдвигу характеристик схемы (рис. 3.10,
а) соответствует сдвиг l в трехканальных схемах (рис.
3.12, а, в, г). Этот временной сдвиг зависит от расстояния между штрихами l и от скорости движения металла . Поэтому поправка не является постоянной и не может быть учте
тена при градуировке БР3. Для определения скорости движения металла и градуировки БРЗ в схемах с тремя фотодатчи
292
ками используется соотношение
lср ,
где lср l1 l2 среднее значение расстояния между
2
фотодатчиками.
Достоинством схемы является то, что для нее не нужен дополнительный блок постоянного запаздывания, чаще всего выполняемый как лишний канал записи и воспроизведения на магнитной ленте.
Принципиально возможно также измерение скорости движения не по максимуму корреляционной функции входных сигналов коррелятора.
а по нулевому значению ее производной, полученной путем дифференцирования одного из этих сигналов. Рассмотрим этот метод подробнее.
Как уже говорилось выше, при измерении скорости корреляционным методом обычно используют два сигнала -
f |
|
t |
и |
f t , где |
|
|
|
l |
транспортное запаздывание |
2 |
T |
|
|||||||
|
|
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
|
||
второго сигнала (предполагаем, что оба сигнала идентичны по форме с точностью до Коррелятор вычисляет корреляционную функцию этих сигналов
293
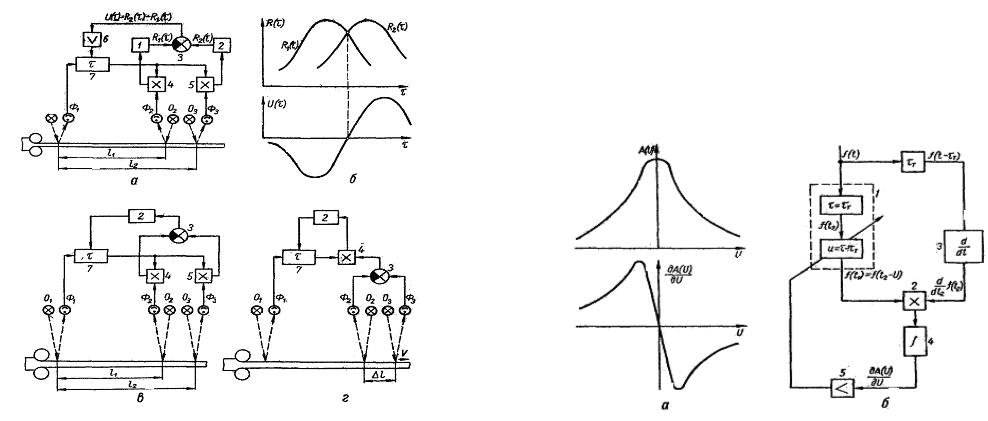
Рис. 3.12. Блок-схемы корреляционных измерителей скорости проката стремя фотодатчиками:
а — схема с двумя множительными устройствами; б — ее характеристики; в — схема с одним сглаживающим фильтром; г — схема с одним множительным устройством. О1,О2 ,О3 —
осветители; Ф1,Ф2 ,Ф3 — фотодатчики. 1. 2 — сглаживающие фильтры; 3 - вычитающее устройство; 4. 6 — множительные
294
устройства; б — усилитель; 7 — БРЗ.
R M f1 t f1 t T M f1 t1 f1 t2 A u ,
где
u T t2 t1,
A u автокорреляционная функция сигнала f1 t .
Рис. 3.13. Схема корреляционного измерителя скорости проката с дифференцированием одного из входных сигналов: а – корреляционная функция и ее производная; б – схема получения производной от корреляционной функции и использования ее в замкнутой системе регулирования.
1 – БРЗ; 2 – множительное устройство; 3 – дифференциатор; 4
– сглаживающий фильтр; 5 – усилитель; T - транспортное запаздывание сигнала второго фотодатчика.
295

Для точного измерения скорости нужно возможно точнее определить значение регулируемого запаздывания T ,
соответствующее максимуму корреляционной функции. Однако в области максимума корреляционная функция имеет очень малую крутизну и изменяется незначительно при изменениях (рис. 3. 13, а). Гораздо более благоприятной для
поиска максимума является форма производной от |
|||||
корреляционной функции |
A u |
. |
В точке |
|
u 0 |
|
T |
||||
|
u |
|
|
||
|
|
|
|
||
производная имеет значительную крутизну и меняет знак в зависимости от положения относительно точки u=0, т. е. она по форме напоминает разностную характеристику u рассмотренной ранее дифференциальной схемы.
Производная A uu
блок-схемы (рис. 3.13, б), которая отличается от обычной схемы корреляционного измерителя скорости наличием дифференциатора 3 в канале второго сигнала.
Нетрудно убедится в том, что сигнал на выходе интегратора 4 будет производной от корреляционной функции
A(u).
Действительно, корреляционная функция A(u) непрерывна при любых значениях u, следовательно, она соответствует дифференцируемому случайному процессу.
Пусть f t — дифференцируемая случайная функция,
y t dtd f t
Тогда
Rfy t1,t2 M f t1 mf y t2 my ,
где |
mf |
и |
|
my — математические ожидания соответственно |
||||||||||||||||||
функций f t и y t . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
Перейдя к центрированным величинам, можем записать |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
R |
fy |
t ,t |
2 |
|
M |
|
f t |
y t |
2 |
|
M |
|
f t |
|
f t |
2 |
, |
(3.76) |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
1 |
|
|
1 |
|
|
|
1 |
dt2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
f t1 mf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
f t1 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
y t2 |
my — центрированные значения функций f t |
|||||||||||||||||||
y t2 |
||||||||||||||||||||||
и y t |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая, что математическое ожидание производной от случайной функции равно производной от ее математического ожидания [8], и рассматривая t1 как постоянную величину, получим
R |
|
t ,t |
|
|
|
A |
|
t ,t |
|
. |
(3.77) |
fy |
2 |
|
f |
2 |
|||||||
|
1 |
|
t2 |
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
Для стационарной случайной функция
|
A |
|
t ,t |
|
|
|
A |
|
t |
|
t |
|
A |
|
u , |
|
f |
2 |
|
f |
2 |
|
f |
||||||||
t2 |
1 |
|
t2 |
|
|
1 |
u |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
где
u t2 t1.
297
296
Таким образом, продифференцировав один из входных сигналов, получим на выходе коррелятора знакопеременный сигнал с большой крутизной в области максимума корреляционной функции, который может быть использован для автоматического управления БРЗ, как это показано на рис. 3.13, б. Преимуществом такой схемы является относительная простота получения нужного сигнала рассогласования, а недостатком — необходимость выполнения операции дифференцирования, связанной с техническими затруднениями.
Эти затруднения могут, быть обойдены при вычислении вместо обычной корреляционной функции сигналов x(t) и y(t):
|
R |
|
|
|
1 |
|
T x t y t dt |
(3.78) |
|||
|
|
|
T |
||||||||
|
xy |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
0 |
|
|
так |
называемой |
|
функции |
корреляции |
Стильтьеса, |
||||||
предложенной Уоттсом [15, 38, 42]. |
|
||||||||||
|
R |
|
|
1 |
T |
x t y t dt, |
(3.79) |
||||
|
T |
|
|||||||||
|
xy |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
где |
y t - «грубо» квантованный на несколько уровней |
||||||||||
входной сигнал y t . |
|
|
|
|
|
|
|
|
|
||
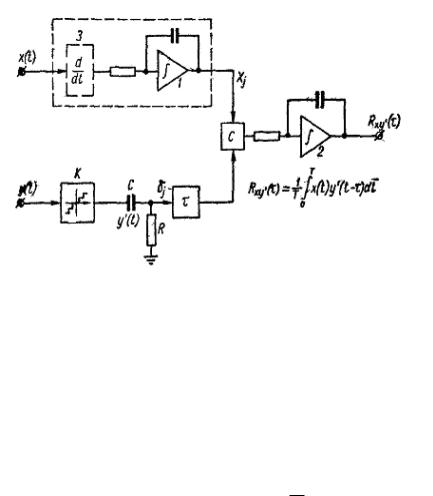
В схему к Стильтьеса (рис. 3.14) не входит дифференциатор З, обозначенный пунктиром. Здесь К — устройство квантования по уровню сигнала y t , — блок запаздывания,
С — двухполярная схема совпадения, 1 и 2 — интеграторы. Дифференцирующая цепочка RC служит для создания коротких импульсов l момент перехода сигнала с одного
уровня
Рис. 3.14. Получение производной от корреляционной функции с помощью коррелятора Стильтьеса.
квантования на другой. Эти разнополярные импульсы подаются на схему совпадения вместе с сигналами X l с выхода интегратора.
Введение дифференциатора З в канал сигнала x(t) дает возможность вычислять с помощью коррелятора Стильтьеса
производную корреляционной функции dtd Rxy . Как видно
из рис. 3.14, при этом в схеме образуется последовательное соединение дифференциатора и интегратора, которое может
299
298
быть попросту удалено без всякого ущерба для работы схемы.
В результате схема существенно упростится, а технические затруднения, связанные с дифференцированием сигнала x(t), будут устранены.
Таким образом, применение коррелятора Стильтьеса позволяет сравнительно просто автоматизировать процесс измерения скорости корреляционным методом по схеме рис.
3.13,б.
3. Измерение скорости при помощи полярных корреляторов
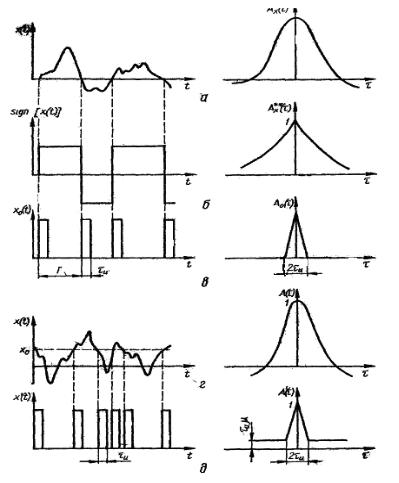
Для измерения скорости движения корреляционным методом достаточно определить положение максимума корреляционной функции на оси абсцисс, а точное вычисление ее ординат не обязательно. Поэтому возможно использование для этой цели упрощенных аппаратурных методов корреляционного анализа —так называемых «релейных» и «двойных релейных» («полярных») корреляционных функций и различных их модификаций [11, 10, 15] эти методы основаны на квантовании по уровню исходного непрерывного сигнала x(t) (3.15,а). При грубом квантовании одного из двух входных сигналов коррелятора на несколько уровней (с сохранением первоначального непрерывного вида второго входного сигнала) получают «корреляцию Стильтьеса» [15, 38, 42].
«Релейные» корреляционные функции получаются как предельный случай при квантовании исходного сигнала x (t) на два уровня, с превращением его в бинарный сигнал вида sign x t (рис. 3.15, б). Такое квантование на два уровня, вы-
полняемое для обоих входных сигналов приводит к «двойным релейным» (полярным) корреляционным функциям, т. е. к вычислению корреляции совпадения полярностей [15]
|
1 |
T |
|
|
|
|
A** |
sign x t sign x t dt. |
(3.80) |
||||
T |
||||||
|
0 |
|
|
|
||
|
|
|
|
|
||
При нормальном законе распределения сигнала ординаты |
||||||
его корреляционной функции |
|
|
|
|||
|
|
|
1 |
T |
|
|
A |
|
x t x t dt |
(Ш.81) |
|||
T |
||||||
|
|
|
0 |
|
||
|
|
|
|
|
||
однозначно связаны с ординатами его полярной корреляционной функции выражениями.
|
|
** |
|
** |
|
2 |
|
|
A sin |
|
A |
|
и A |
|
arcsin A . |
(3.82) |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
Как видно из этих выражений, при использовании |
||||||||
полярной корреляционной функции |
A** вместо обычной |
|||||||
A возникает некоторая методическая погрешность, однако она равна нулю при A 1 (т. е. максимумы обеих функций
совпадают), что позволяет использовать корреляцию совпадения полярностей для измерения скорости движения. При этом существенно упрощается аппаратурная реализация корреляционного измерителя скорости, так как множительное устройство заменяется простой схемой совпадения, а задача БРЗ сводится к задержке сформированных импульсных сигналов. Как будет показано ниже, при использовании полярной корреляции в качестве БРЗ можно применять регистр сдвига с пере
300 |
301 |
менной частотой продвигающих импульсов, что делает схему измерителя скорости весьма простой и надеж ной [17].
Рис. 3.15. Упрощенные корреляционные функции (полярная корреляция и ее модификация).
302
Сигнум-сигнал sign x t (рис. 3.15, б) полностью
определяется моментами перемены знака, поэтому он может быть заменен эквивалент ной последовательностью коротких импульсов фиксированной длительности и амплитуды, соответствующих моментам перехода через нуль исходного сигнала (рис. 3.15, в).
Последовательности имеет ширину, равную удвоенной длительности импульса [2]. При достаточно коротких нулевых импульсах может быть получен некоторый выигрыш в точности отыскания максимума полярной корреляционной функции таким методом. Следует отметить, что нарушение повторяемости исходных непрерывных сигналов и снижение максимума их взаимной корреляционной функции ведет к резкому уменьшению максимума взаимной функции сформированных из этих сигналов последовательностей нулевых импульсов, т. е. с повышением точности резко падает помехоустойчивость [28]. Возможна модификация последнего метода, при которой совмещают не нули исходного сигнала, а его выбросы за некоторый фиксированный уровень (рис. 3.15,
г, д) [18].
§3. 3 Примеры экстремальных систем
скорреляторами
Описанные выше методы автоматического измерения скорости движения были реализованы в Институте кибернетики АН УССР в виде двух лабораторных макетов автоматических корреляционных измерителей скорости движения проката (КИСП) [ 11,17].
Первый макет был выполнен с БРЗ, использующим магнитную запись на ленте и обеспечившим устойчивую
303
работу устройства в широком диапазоне изменения задержек ( 0 0,3сек ) при достаточно широкой полосе пропускания
сигнала (до 6-8 кгц.). В качестве основы макетов использовалась дифференциальная схема, причем корреляторы вычисляли «двойные релейные» корреляционные функции (корреляцию совпадения полярностей) [11].
Блок-схема КИСП с БРЗ, использующим магнитную запись, приведена на рис. 3.16.
Устройство работает следующим образом. Снимаемый с фотодатчика Ф1 непрерывный сигнал f(t) усиливается предварительным усилителем У1 и подается на вход усилителя записи УЗ. Нагрузкой усилителя записи являются две записывающие головки для двухдорожечной записи - ГЗ1 и ГЗ2 , соединенные параллельно. Считанный при помощи головок воспроизведения ГВ1 и ГВ2 , сигнал усиливается усилителями воспроизведения УВ1 и УВ2 и несколько раз подвергается поочередному усилению и ограничению в усилителях-ограничителях УО1 и УО2 для получения сигнумсигнала с большой крутизной фронта.
Изменение запаздывания осуществляется до формирования сигнум-сигнала путем смещения блока читающих головок БГ относительно записывающих головок ГЗ1 и ГЗ2 , при помощи ходового винта. Вращение ходового
винта осуществляться вручную, а также при помощи исполнительного двигателя ИД, который работает от сигнала рассогласования двух каналов коррелятора, выполненного по дифференциальной схеме.
304
Магнитная запись в БРЗ осуществляется одновременно на две дорожки непрерывного кольца стандартной магнитной пленки (ширина 6,35 мм, тип 2), протягиваемой со скоростью 381 мм /сек. Применение двухдорожечной записи позволяет получить небольшое дополнительное постоянное запаздывание1 2 , необходимое для работы дифференциальной
схемы. Предварительное стирание записи на обеих дорожках производится одновременно при помощи одной однодорожечной стирающей головки ГС, питаемой током с частотой 70 кгц. В одной из испытанных схем удовлетворительное стирание записи было получено при помощи цилиндрических постоянных магнитов, одновременно служащих направляющими колонками для магнитной ленты.
Сигнум-сигналы |
обоих |
каналов |
коррелятора |
|
sign f t 1 и sign f t |
2 , а также сигнум-сигнал второго |
|||
фотодатчика sign f t T |
подаются на схемы совпадения С1 |
|||
и С2 . Разность выходных сигналов схем совпадения, получаемая на выходе вычитающего устройства ВУ, усиливается усилителем У3 и подается на исполнительный
двигатель ИД, вал которого через редуктор Р вращает ходовой винт блока считывающих головок БГ до отыскания максимума корреляционной функции и достижения равновесия схемы.
После этого скорость движения проката определяется по положению блока считывающих головок при помощи линейки с нониусом.
Пик корреляционной функции очень узок и при значительном начальном рассогласовании система сама не смогла
бы его отыскать, поэтому к разработанной схеме добавлена
305
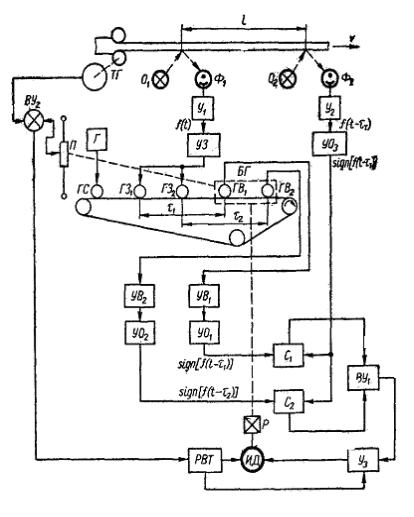
Рис. 3.16. Блок-схема корреляционного измерителя скорости проката с блоком регулируемого запаздывания, использующим магнитную запись.
306
система грубого поиска экстремума, работающая от тахогенератора ТГ, который связан с валками прокатного стана. Выходное напряжение тахогенератора с точностью до нескольких процентов соответствует скорости металла. Это напряжение на вычитающем устройстве ВУ2 (поляризованное
реле) сравнивается с напряжением, снимаемым с потенциометра П движок которого механически связан с блоком воспроизводящих головок БГ. Положение блока головок в уравновешенной схеме должно соответствовать скорости металла. При значительном рассогласовании схемы превышающем зону нечувствительности канала грубого поиска экстремума, исполнительный двигатель управляется каналом грубого поиска. При этом срабатывает последовательно включенное реле РВТ и отключает точный канал. Когда схема грубого поиска уравновешивается, то реле РВТ отпускает и начинает работать канал точного поиска экстремума, который управляет исполнительным двигателем и окончательно устанавливает блок головок БГ в правильное положение.
В связи со сложностью и низкой надежностью корреляционных измерителей скорости, использующих электромеханические БРЗ с движущимися магнитными носителями, очевидна необходимость разработки более перспективных для промышленного применения схем. В Институте кибернетики АН УССР разработаны корреляционные измерители скорости с дискретным полярным коррелятором, в которых в качестве БРЗ используется регистр сдвига с переменной частотой продвигающих импульсов [17].
Блок-схема устройства приведена на рис.3.17. Снятые с
307
фотодатчиков сигналы и клиппируются (усиливаются и ограничиваются) при помощи усилителейограничителей УО. Сигнум-сигналы sign f1 t и sign f2 t подаются на двухканальный полярный коррелятор, собранный по дифференциальной схеме. Сигнал sign f1 t по ступает на
вход регистра сдвига РС с переменной частотой продвигающих импульсов. В регистре этот сигнал квантуется по времени с частотой тактовых (продвигающих) импульсов
f |
|
|
1 |
|
и задерживается на время, равное qT , где q — |
|
n |
|
|
||||
|
|
Tn |
|
|
n |
|
|
|
|
|
|
|
|
число |
ячеек регистра сдвига, а Tn — период следования |
|||||
продвигающих импульсов. Задержанный сигнал f1 t с выхода |
||||||
регистра |
(ячейка q — 2 на рис. 3.17) вместе с сигналом |
|||||
sign f2 |
t |
подается на схему совпадения И1 дополнительное |
||||
постоянное запаздывание , необходимое для работы дифференциальной схемы (сдвиг характеристики модели объекта регулирования - второго канала коррелятора),
осуществляется последними ячейками регистра (q, q -1). Выходной сигнал с последней ячейки регистра сдвига f3 t
вместе с сигналом sign f2 t подается на схему совпадения второго канала коррелятора — И2 . Сигналы, снимаемые с
выходов регистра, представляют собой серии импульсов, следующих с частотой квантования (с частотой сдвигающих или тактовых импульсов). Полярность квантованных
импульсных сигналов соответствует полярности сигнум- |
|
сигнала sign f1 t . Выходные сигналы схем совпадения И1 |
и |
И2 после сглаживания в фильтрах 1 и 2 подаются |
на |
вычитающее устройство ВУ1 .Разностный сигнал U U1 U2
308
после интегрирования воздействует на генератор тактовых импульсов ГТИ, управляя его частотой [17]. Частота тактового генератора определяет величину регулируемой задержки , введенной в канал первого сигнала f1 t . Поскольку частота
тактовых импульсов прямо пропорциональна и скорости , частотомер, включенный на входе БРЗ, можно проградуировать непосредственно в единицах измерения скорости. Включенный параллельно ему счетчик импульсов позволяет одновременно измерять длину прокатанного металла.
В схеме предусмотрено также устройство грубого поиска максимума, которое работает от тахогенератора, соединенного с валками прокатного стана. Выходной сигнал тахогенератора UTГ , приблизительно пропорциональный скорости движения
металла в стане, подается на вычитающее устройство ВУ2 , на
которое также поступает корректирующий сигнал системы точного поиска максимума. Суммарный сигнал управляет частотой генератора тактовых импульсов.
В разработанной схеме использован БРЗ с однократным регистром сдвига (см. рис. 3. 18). Его основными элементами являются 80 полупроводниковых триггеров с реостатноемкостными связями ( R2C1, R1C2 и т. д.) и такое же количество логических реостатно-емкостных-диодных цепей («RCDцепочек», R6C3 D1, R7C4 D2 и т. д.) [17, 32]. На рис. 3. 18 для
простоты изображено только два триггера. Триггеры собраны на транзисторах П20, работающих в насыщенном режиме. Логические RCD - осуществляют сдвиг информации о состоянии предыдущих триггеров в следующие триггера при поступлении продвигающих импульсов, которые приходят с выхода ГТИ через мощный формирующий каскад.
309
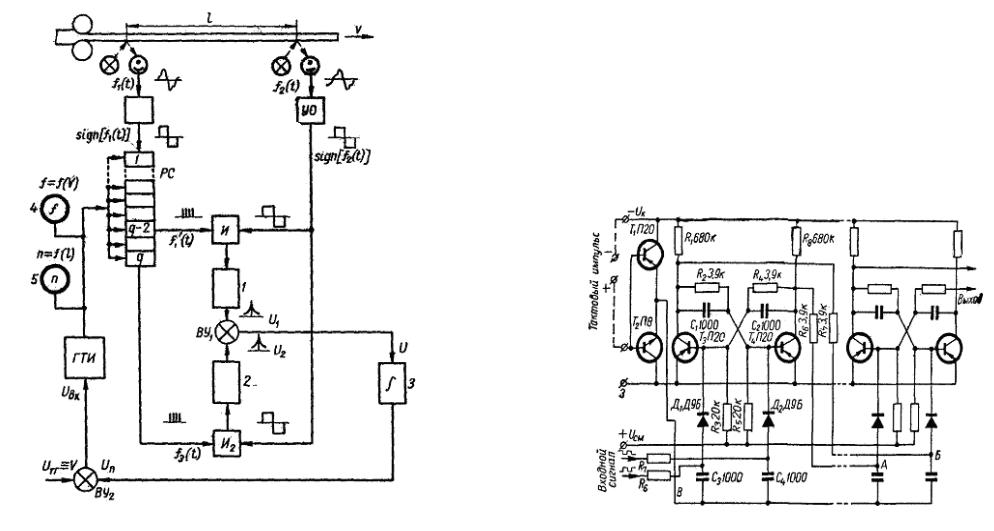
Рис. 3.17. Блок-схема дискретного корреляционного измерителя скорости с БРЗ на регистре сдвига.
310
Клиппированный (усиленный и ограниченный) двоичный сигнал с формирователя (УО. рис. 3.17) подается на первую RCD на входе регистра сдвига. При этом если сигнал 1 и тактовый импульс поступают одновременно, сигнал сразу поступит на первый триггер регистра сдвига и перебросит его в положение 1. Если же сигнал 1 (импульс) поступает на вход регистра сдвига в паузе между тактовыми импульсами, то он будет передан на первый триггер только во время последующего тактового импульса, т. е. возникает соответствующая
Рис. 3.18. Схема двух ячеек транзисторного регистра сдвига.
311