

Учебное пособие 2015
.pdfзамкнутой системы будет определяться в виде |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
K (z) z 1 (1 z 1 )F (z) . |
|
(2.120) |
||||||||||||||||||||||||
Формула (2.120) для рассматриваемого случая будет |
|||||||||||||||||||||||||||||||||
|
|
|
|
K (z) |
(1 z-1 ) |
|
|
(z) |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
(2.121) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Y(z) |
|
(1 |
z-1 )Y(z -1 ) i |
|
|
|||||||||||||||||
а (2.102) и (2.101) будут |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(z) , |
|
|
|||||||||
|
|
|
|
|
|
YY |
|
(z) |
|
(2.122) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4a |
2 |
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qпр |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)2 aq2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
D a( |
|
|
|
|
|
|
|
|
|
|
|
{[1 K (z)][1 K (z)] |
|
(z) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
S |
S |
|
|
|
|
|
j |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
пр |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
(z) dz |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
aqпр . |
|
(2.123) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
4a |
|
qпр |
z |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
||||||||||||||||||||||||||||||
В (2.122) (z) |
является импульсной спектральной |
||||||||||||||||||||||||||||||||
плотностью от ( 1)S |
S |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Методика синтеза оптимальной импульсной экстремальной системы с модулирующим воздействием будет такой же, как и в предыдущем случае.
Пример. Для тех же условий, что и в предыдущем
примере, полагая, что (z) , получим |
|
||||||
K (z) |
1 b |
|
z 1 |
(1 z 1 ) |
, |
(2.124) |
|
2 |
(1 |
bz 1 ) |
|||||
|
|
|
|
||||
|
|
171 |
|
|
|
||
W (z) |
1 b |
|
|
1 z 1 |
|
||
|
|
|
|
, |
(2.125) |
||
|
|
1 |
|
||||
|
4aqпр 1 |
(1 b)z 1 |
|
||||
|
2 |
|
|||||
|
|
|
|
|
|
|
|
D aC |
5 8b b2 |
|
|||
|
|
, |
(2.126) |
||
|
|
||||
|
|
4(1 |
b2 ) |
|
|
q 2 |
C b (1 b2 ) 1 . |
(2.127) |
|||
пр |
|
|
|
|
|
Изложенные методы позволяют анализировать случайные процессы в импульсных экстремальных системах без учета инерционных свойств объекта регулирования.
2.3.3. Исследование экстремальных систем методом баланса спектральных плотностей и математических ожиданий.
В[65] предложен метод анализа случайных процессов в импульсных экстремальных системах с модуляцией (ИЭСМ), позволяющий учесть как инерционные, так и нелинейные свойства объекта оптимизации.
В[65] рассматривается разностная ИЭСМ при таких допущениях.
1. Объект аппроксимируется последовательным
соединением линейного инерционного звена W2 ( p) (рис. 2.5, а) и параболического звена.
2.Возмущения δ и δ‗, являющиеся стационарными случайными функциями времени, подчиненными нормальному распределению с нулевыми математическими ожиданиями, действуют на входе и выходе нелинейного звена.
3.Рассматривается установившийся процесс.
172
Требуется найти выражение для среднеквадратичной ошибки системы в установившемся процессе в дискретные моменты времени с учетом нелинейных и инерционных свойств объекта, затем, минимизируя его, получить соотношение для оптимальных параметров системы, на пример для коэффициента усиления линейной части.
Ошибку системы ε (рис. 2.20, а) представим в виде двух составляющих
|
|
x , |
(2.128) |
||
e( p) W ( p)W ( p)u (z) ( p) , |
(2.129) |
||||
1 |
2 |
|
|
|
|
и |
|
|
|
|
|
m( p) W ( p)W |
2 |
( p)V (z) , |
(2.130) |
||
|
1 |
|
|
|
|
где е(р) — составляющая ошибки от регулирующего воздействия u (z) ,
т(р) — составляющая ошибки от модулирующего воздействия (z) .
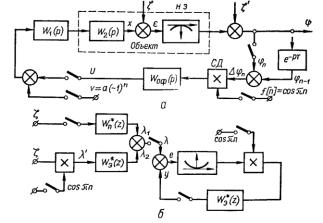
Рис 2.20. 173
a — схема ИЭСМ разностного типа W1 (s) — сервомотор, W2 (s) — линейная инерционная часть объекта Ф — фильтр нижних частот с фиксатором нулевого порядка
(необязательна) e ST — элемент задержки, СД —синхронный детектор, НЗ — нелинейное звено с экстремальной характеристикой δ, δ —случайные помехи, θ — показатель экстремума, ε— ошибка системы, и — регулирующее воздействие, — модуляция, б — эквивалентная схема ИЭСМ для расчета флуктуационной ошибки.
Очевидно, что составляющая ошибки от модулирующего воздействия является периодической функцией времени, закон изменения которой нам известен. Далее мы будем интересоваться составляющей ошибки e(p), которая будет носить случайный характер. Если разрешить уравнение системы относительно значений ошибки e(р) и дискретные моменты времени, то, как показано в [28], получим
e |
n |
W |
Э |
(E)[( 1)n a |
H |
e2 |
] W |
П |
(E) |
n |
W |
Э |
(E)[( 1)n |
|
] , (2.131) |
||||
|
|
|
n |
|
|
|
|
|
|
|
n |
|
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WЭ (E) |
W |
Л |
(E)(1 E 1 ) |
, |
|
(2.131а) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
kW (E)(1 E 1 ) 1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
Л |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
W (E) [kW (E)(1 E 1 ) 1] 1 , |
|
(2.132) |
|||||||||||||
|
|
|
|
П |
|
|
|
|
Л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WЛ (E) W1W2 (E) Wоф (E) , |
|
(2.133) |
|||||||||||||
—передаточная функция линейной части системы. При этом
W |
(E) (1 e Tp )( |
ф |
p 2 |
p) 1 , |
(2.134) |
оф |
|
|
|
|
—передаточная функция последовательного соединения фильтра с фиксатором нулевого порядка (наличие этих элементов необязательно);
174

aM — амплитуда модулирующего воздействия на выходе
инерционной части объекта; α — коэффициент усиления линейной части системы;
aH — крутизна параболы.
k 2aM aH . |
(2.134а) |
Уравнению (2.131) соответствует структурная схема рис.
2.20, б.
Требуется определить дисперсию e2 [n] и минимизировать ее.
Для решения данной задачи воспользуемся методом баланса спектральных плотностей и математических ожиданий [32].
Рассматривая математическое ожидание и спектральную плотность сигнала ошибки системы en , получим, что
~ ~ ~
усредненное повремени математическое ожидание M [ en ] , а
спектральная плотность сигнала ошибки ee ( ) определяется из нелинейного интегрального уравнения с отклоняющимся аргументом
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
2 |
|
|
|
) |
|||||||||
|
|
|
( |
|
) |
( |
j |
) |
( |
|
|||||||||||||||||
|
|
|
ee |
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
aH |
|
|
|
) |
|
2 |
ee ( |
|
) ee ( |
|
|
|
)d |
|
, (2.135) |
|||||||||||
|
WЭ ( |
|
|
|
|
||||||||||||||||||||||
j |
|
|
|
|
|||||||||||||||||||||||
2 |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где (рис. 2.20, б) определяется спектральными
плотностями внешних возмущений
175
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( j )] , |
|||||||||||||||||||||
|
( ) |
( ) 2 Re[ |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
( ) |
|
WП |
( j ) |
|
|
( ) , |
|
(2.136) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
( |
|
|
|
) |
1 |
|
|
|
|
|
) |
|
|
2 |
|
( |
|
) , |
||||||||||||||||||||||
|
|
|
|
|
|
W ( |
j |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Э |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
( |
|
) |
1 |
W ( |
|
)W ( |
|
) |
|
|
[ j( |
|
||||||||||||||||||||||||||||||
|
|
j |
j |
|
|
|
)] . |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
П |
|
|
|
|
|
|
|
Э |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для приближенного решения этого уравнения использован метод определения функциональных поправок, развитый в трудах чл.-корр. АН УССР Ю. Д. Соколова. Этот метод чрезвычайно полезен при рассмотрении спектральных задач, так как функциональная поправка Ю. Д. Соколова имеет здесь вполне реальный физический смысл — это дисперсия сигнала ошибки.
Поэтому, решая (2.135) по методу Ю. Д. Соколова, мы сразу же получаем выражение для дисперсии сигнала ошибки. Выражение для дисперсии случайной ошибки по первому приближению имеет вид
Dee |
|
|
2D |
|
|
, |
(2.137) |
|
|
|
|
|
|
||||
1 4a 2 |
|
|
||||||
|
|
D |
D 1 |
|
||||
|
|
|
H |
|
|
|
||
где |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
D |
|
|
|
|
|
|
|
( |
|
)d |
|
, |
|
(2.138) |
|||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
|
|
|
|
) |
|
2 d |
|
. |
|
||||||||||
|
|
|
|
|
W ( |
|
|
|
|
|
|||||||||||||
D |
|
|
|
j |
|
(2.139) |
|||||||||||||||||
2 |
|||||||||||||||||||||||
|
|
|
|
Э |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
176 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если
4a2 |
D |
D 0,49 , |
(2.140) |
H |
|
|
|
то первое приближение отличается от нулевого
(Dee D ) всего на 10%. Как следует из (2.135), величина D представляет собою дисперсию сигнала на выходе устойчивого линейного фильтра WЭ ( j ) при воздействии на
его вход белого шума с единичной дисперсией; как показано на конкретных примерах, условия устойчивости,
накладываемые на коэффициенты WЭ ( j ) , приводят к тому, что D <<1. Поэтому можно пользоваться нулевым
приближением для довольно значительного диапазона дисперсий, определяющегося из (2.140). Этому соответствует пренебрежение нелинейными компонентами (2.131). Пример. Рассмотрим случай, когда 0, 0 .
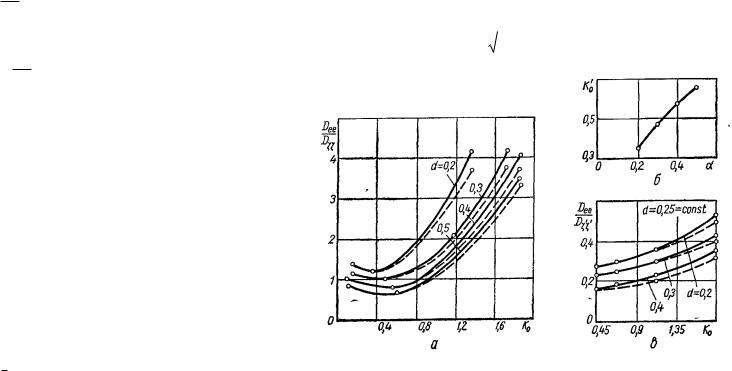
На рис. 2.21, а для данного случая при |
W (s) ( |
p 1) 1 , |
||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
e |
T 1 |
|
|
|
|
|
||
R |
[m] D |
Ш построена зависимость |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dee |
f (k |
|
, d ) , |
|
|
|
|
|
|
|
|
0 |
|
|
||
|
|
|
|
|
D |
|
|
|
||
|
|
|
|
|
|
|
|
|
||
где Dee / D — относительная дисперсия; k0 aH 2 aM
T
( aM — амплитуда модуляции); d e , Т — интервал
дискретности (сплошными линиями — по нулевому приближению, а пунктирными линиями — по первому приближению).
177
Минимизация дисперсии сигнала ошибки для этого случая показывает, что при наличии шума с дисперсией, при которой удовлетворяется (2.140), и с достаточно широким спектром ( Ш (3 4)T ) , оптимальная величина k0 ,
минимизирующая средний квадрат ошибки, не зависит от характеристик шума и определяется лишь интервалом дискретности
k0 |
|
|
2(1 d 2 ) 1 d |
|
. |
(2.141) |
|
|
1 |
d |
|
||||
|
|
|
|
|
|
||
Рис. 2.21.
а — зависимость относительной дисперсии ошибки ИЭСМ от коэффициента усиления k0 и периода дискретности для случая 0 , 0 , б — зависимость оптимального коэффициента усиления от интервала дискретности для случая 0 , 0 , в — зависимость относительной
178
дисперсии ошибки ИЭСМ от коэффициента усиления K 0 и интервала дискретности для случая 0, 0 .
На рис. 2.21, в представлена зависимость
Dee / D f (k0 , d) , когда 0 , 0 и при тех же условиях, что и в предыдущем примере.
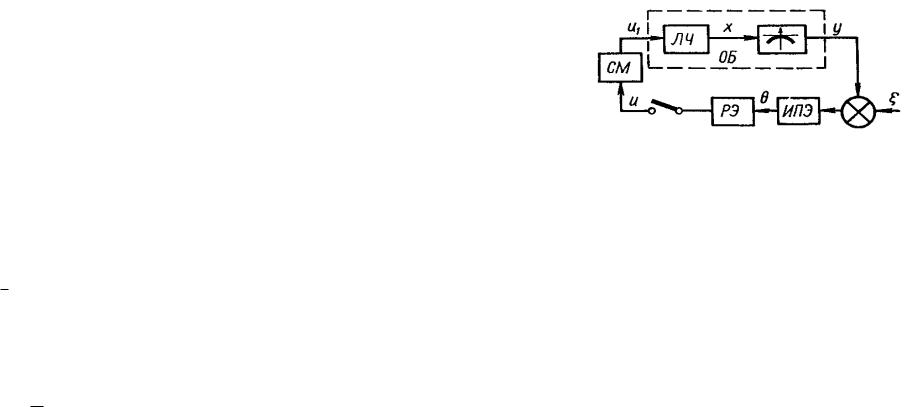
В работе Ю. С. Попкова [49] исследуется помехоустойчивость релейных ИЭС. Блок-схема ИЭС представлена на рис. 2.22. В [49] определяется величина дисперсии помехи с временем корреляции, значительно меньшим интервала дискретности, при которой происходит срыв установившегося периодического режима. В соответствии с [48], условие периодического режима без помех заключается в следующем:
|
|
|
|
|
|
|
[N] , |
[N] 0 , |
(2.117) |
||||
где [N] — значение показателя экстремума; N — число
интервалов дискретности, заключенное в полупериоде автоколебаний вокруг экстремума; — порог срабатывания реле (зона нечувствительности).
При наличии помех условия периодического режима видоизменяются так:
[N] (N) , [N] [N] 0 . (2.143)
Здесь — среднее значение отклонения от периодического режима, вызванное наличием помех. Как указывалось [48, 49], условия периодического режима получают наглядную частотную интерпретацию при помощи так называемой частотной характеристики РИЭС:
M (N ) |
1 |
|
|
|
|
|
|
|
|
|
|
[N ] j [N ] . |
(2.144) |
||||||
|
|
|
|||||||
2 sin |
|
|
|||||||
|
|
|
|
|
|
|
|
||
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
179
Рис. 2.22. Блок-схема РИЭС, находящейся под действием случайной помехи ξ:
ИПЭ – измеритель показателя экстремума, РЭ – релейный элемент; ЛЧ – линейная часть системы ,СМ – сервомотор; ОБ – объект.
При наличии помех следует ввести в рассмотрение частотную характеристику M (N ) , отображающую отклонение от периодического режима
|
|
M (N ) |
1 |
|
|
|
[N ] j [N ] . |
(2.145) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 sin |
|
|
|||
|
|
|
N |
|
|
|||
|
|
|
|
|
|
|||
|
|
Поэтому условия (2.198) переписываются в виде |
|
|||||
I |
m |
[M (N ) M (N )] , |
Re[M (N ) M (N )] 0 |
. (2.146) |
||||
|
|
|
|
|
|
|
|
|
На рис. 2.48 приведены частотные характеристики РИЭС. Жирной линией показана частотная характеристика при отсутствии помех, из которой видно, что в системе существует предельный цикл с N = 9, пунктиром — суммарная частотная
характеристика M |
M M , при наличии помех со сред |
|
|
|
180
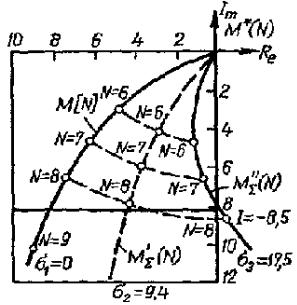
неквадратичным значением 2 = 9,4 и тонкой линией —
характеристика M |
|
при наличии помех |
3 = 17,4. Из рис. 48 |
|
|
|
видно, что если 3 , то условия существования предельного цикла с N = 9 сохраняются и система работоспособна. При 3 =17,3 условие (2.143) нарушается и
установившийся предельный цикл срывается. Этот случай соответствует тому, что точка пересечения суммарной характеристики M (N ) и прямой — лежит вне третьего
квадранта.
Таким образом, задача заключается в нахождении частотной характеристики M (N ) , которая определяется средними значениями [N] и [N] .
Для нахождения [N] и [N] должна быть задана двумерная плотность распределения помехи и ее первой разности ( , ) . Процесс нахождения [N] и
[N] заключается в следующем.
Пусть динамика линейной части системы, регулятора и объекта описываются уравнениями
P (eq 1) Q (eq 1)u[n], u[n] Ф(y[n] [n]), (2.147)
y[n] kH x 2 [n].
Тогда динамика замкнутой системы описывается нелинейным разностным уравнением
P (eq 1)x[n] Q (eq 1)Ф{-k H x 2 [n] [n]}, (2.145)
где eq e pT ,Ф( y ) - закон регулирования релейноимпульсного оптимизатора;
181
k H - крутизна параболической характеристики объекта.
Рис. 2.23. Характеристики РИЭС без помех (M[N])
и с помехами (M [N ]) .
|
Положим теперь |
~ |
(2.149) |
|
x[n] x[n] [n], |
||
где |
~ |
|
|
x[n]- значение входного сигнала нелинейной части |
|
||
объекта в периодическом режиме без помех;
[n] - отклонение от периодического режима, вызванное
наличием помех.
Используя (2.148) и (2.149), легко получить уравнение для отклонения от периодического режима (уравнение в вариациях [49]).
182

183
№ |
Объект |
Показатель |
Регули- |
Возмуща |
Прин- |
Литература |
|||
пп |
управления |
качества |
рующие |
ющие |
цип |
|
|
||
|
|
|
(зкстрем) |
воздейст- |
воздей- |
ре- |
|
|
|
|
|
|
|
|
вия |
ствия |
гулир |
|
|
|
|
|
|
|
|
|
|
||
1 |
Системаав- |
Сдвиг |
фаз |
Индукти |
Измене- |
Замк- |
Первая систе- |
||
|
томатичес- |
между нап- |
вность |
ние па- |
нутая |
ма экстремаль- |
|||
|
кой |
наст- |
ряжением в |
резонанс |
раметров |
сис- |
ного |
управле- |
|
|
ройки |
|
роторе |
ва- |
ного |
основно- |
тема |
ния, построен- |
|
|
электричес |
риометра и |
контура |
го |
|
ная по замкну- |
|||
|
кого |
резо- |
током в ос- |
|
контура |
|
тому |
принци- |
|
|
нанного |
новном |
|
|
|
|
пу в 1922г, |
||
|
колебатель |
контуре |
|
|
|
|
предназнача- |
||
|
ного |
кон- |
|
|
|
|
|
лась для под- |
|
|
тура |
|
|
|
|
|
|
держания мак- |
|
|
|
|
|
|
|
|
|
симального |
|
|
|
|
|
|
|
|
|
значения |
|
|
|
|
|
|
|
|
|
тока [7] |
|
2 |
Система |
Напряже- |
Индук- |
Измене- |
То же |
Регулятор |
|||
|
автомати- |
ние отно- |
тивность |
ния пара- |
|
предназначал- |
|||
|
ческой |
сительного |
дугогася- |
метров |
|
ся для компен- |
|||
|
настройки |
смещения |
щей |
сети в за- |
|
сации |
напря- |
||
|
дугогася- |
нейтрали |
катушки |
висимос- |
|
жения |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
щих |
кату- |
|
|
|
|
ти |
от |
|
несимметрии |
|
|
шек в |
воз- |
|
|
|
|
погоды |
и |
|
сети |
|
|
душных и |
|
|
|
|
климати- |
|
|
||
|
|
кабельных |
|
|
|
|
ческих |
|
|
|
|
|
|
сетях |
|
|
|
|
|
условий |
|
|
|
|
3 |
Система |
Полезная |
Индуктив- |
Режим |
ра- |
>> >> |
Салихов |
|||
|
|
управления |
мощ- |
|
нось |
анод- |
боты гене- |
|
З.М.-Изв АН |
||
|
|
радиопере- |
ность |
|
ного |
кон- |
ратора |
те- |
|
СССР ОТН |
|
|
|
датчиков |
передат- |
тура |
|
леграфный, |
|
Э и А,1961,6 |
|||
|
|
|
|
чика |
|
выходного |
частотная |
|
|
||
184 |
|
|
|
|
|
каскада и |
модуляция, |
|
|
||
|
|
|
|
|
величина |
режим |
на |
|
|
||
|
|
|
|
|
|
связи |
с |
боковой |
|
|
|
|
|
|
|
|
|
антенной |
полосе и др |
|
|
||
|
4 |
Устройство |
Напряже |
Перемен- |
Разброс |
|
>> >> |
РЖ А и ВТ, |
|||
|
|
автомати- |
ние |
на |
ные ѐмкос- |
параметров |
|
1964, I, |
|||
|
|
ческого |
выходе |
|
ти |
и |
контура |
|
|
реф 1А262П |
|
|
|
регулирова |
настраи- |
индуктив- |
|
|
|
|
|||
|
|
ния |
|
ваемого |
ности |
|
|
|
|
|
|
|
|
импеданса |
контуа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
№ |
Объект |
Показатель |
Регули- |
Возмуща |
Принцип ре- |
Литерату |
||||
|
пп |
управления |
качества |
рующие |
ющие |
гулирования |
ра |
|
|||
|
|
|
(зкстрем) |
воздейст- |
воздей- |
|
|
|
|
||
|
|
|
|
|
вия |
|
ствия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
Автомати- |
Фаза |
|
Частота |
|
|
Замкнутая |
|
Скрипко |
|
|
|
ческий |
огибающей |
питаю- |
|
|
система |
ис- |
А.Л., |
|
|
|
|
прибор для |
АМ |
напря- |
щего ге- |
|
|
пользует экс- |
Ковалев |
||
|
|
ядерного |
жения |
нератора |
|
|
тремальный |
Г.В.-Изв |
|||
|
|
магниторе- |
|
|
ВЧ |
|
|
регулятор |
с |
АН |
|
185 |
|
зонансного |
|
|
колеба- |
|
|
непрерыв- |
|
Киргиз |
|
|
спектро- |
|
|
ний |
|
|
ным поико- |
ССР, |
сер |
||
|
|
скопа |
|
|
|
|
|
вым |
|
ест |
и |
|
|
|
|
|
|
|
|
сигналом |
|
техн наук |
|
|
|
|
|
|
|
|
|
|
|
1963,5,5 |
|
|
6 |
ВЧ |
Максимум |
Измене- |
Измене- |
Замкнутая |
|
|
|
||
|
|
сушильные |
КПД |
ВЧ |
ние резо- |
ние |
система |
|
|
|
|
|
|
установки |
генерато- |
нансного |
свойств |
|
|
|
|
||
|
|
|
ров |
(регу- |
сопротив |
прослу- |
|
|
|
|
|
|
|
|
лирование |
ления |
шивемо- |
|
|
|
|
||
|
|
|
ведется |
контура |
го |
ма- |
|
|
|
|
|
|
|
|
так, |
чтобы |
|
териала |
|
|
|
|
|
|
|
|
RН = Rэ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
186
7 |
Регулирован |
Велична |
Изменение |
Изменение |
>> >> |
Ратклифф С- |
||||
|
ие выходной |
тока |
в |
размеров |
напряже- |
|
Вопросы |
|
||
|
мощности |
кристалл |
объемного |
ния, |
|
радиолока- |
|
|||
|
клистронно- |
-ле |
сме- |
резонтора |
изменение |
|
ционной |
|
||
|
го |
гетероди- |
сителя |
|
частоты, |
|
техники, |
|
||
|
на |
в |
схеме |
|
|
|
связанное |
|
1954, 6 (24) |
|
|
автоматичес- |
|
|
|
с |
|
|
|
||
|
кой |
|
|
|
|
|
вращением |
|
|
|
|
подстройки |
|
|
|
антенны |
|
|
|
||
|
частоты |
|
|
|
|
|
|
|
||
|
(АПЧ) |
|
|
|
|
|
|
|
|
|
8 |
Экстремаль- |
Напряже- |
Изменение |
|
>> >> |
Викторов |
|
|||
|
ный |
эндо- |
ние |
на |
несущей |
Изменение |
|
В.А.- Авто- |
||
|
вибраторны |
выходе |
частоты |
уровня |
|
матика |
и |
|||
|
й уровнемер |
эндовиб- |
генератора |
жидкости в |
|
телемехани- |
||||
|
|
|
|
ратора |
|
сосуде |
|
ка, 1963, 11 |
|
|
9 |
Система |
Освящен |
Изменение |
|
>> >> |
[14] |
|
|||
|
слежения за |
-ность |
направле- |
Перемеще- |
|
|
|
|||
|
световым |
|
|
ния чувст- |
ние осве- |
|
|
|
||
|
пятном |
или |
|
|
вительного |
щенного |
|
|
|
|
|
источником |
|
|
элемента |
пятна |
|
|
|
||
|
света |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
Объект |
Показатель |
Регули- |
Возмущаю |
Прин- |
Литерату |
|||
|
пп |
управления |
качества |
рующие |
|
щие |
цип ре- |
ра |
||
|
|
|
|
(зкстрем) |
воздейс |
воздей- |
гулиро- |
|
||
|
|
|
|
|
|
твия |
ствия |
вания |
|
|
|
|
|
|
|
|
|
|
|
||
|
10 |
Система |
ав- |
Яркость |
Переме |
Изменение |
>> >> |
[14] |
||
|
|
томаической |
изображения |
-щение |
расстояния |
|
|
|||
|
|
наводки |
фо- |
(четкость) |
|
до объекта |
|
|
||
|
|
тообъектива |
|
|
|
|
|
|
|
|
|
11 |
Система |
ав- |
Взаимокор- |
Переме |
Передви- |
>> >> |
[14] |
||
187 |
|
томаической |
реляционная |
-щение |
жение |
|
|
|||
|
ориентации |
функция сиг- |
карты |
объекта |
|
|
||||
|
|
карты |
по |
налов, харак- |
|
|
|
|
|
|
|
|
местности |
теризующая |
|
|
|
|
|
||
|
|
|
|
местность и |
|
|
|
|
|
|
|
|
|
|
карты |
|
|
|
|
|
|
|
12 |
Система |
ав- |
Минималь- |
Механи |
Отклоне- |
>> >> |
Фицнер |
||
|
|
томатическо |
ное |
отклоне- |
-ческие |
ние |
разме- |
|
Р.Н.- |
|
|
|
го простран- |
ние |
по всем |
переме- |
ров |
от |
|
Автома- |
|
|
|
ственного |
координатам |
щения |
номиналь- |
|
тика и те- |
|||
|
|
размещения |
от |
положе- |
заготов- |
ного |
|
лемеха- |
||
|
|
деталей |
|
ния аблона |
ки |
|
|
|
ника, |
|
|
|
|
|
|
|
|
|
|
|
1961,1,7. |
|
|
|
|
|
|
|
|
|
|
|
188
13 |
Квантова- |
Величина |
||
|
тель с само- |
среднеквад |
||
|
настраиваю- |
ратчной |
||
|
щим |
поро- |
ошибки |
|
|
гом |
|
квантова- |
|
|
|
|
ния |
|
14 |
Оптимиза- |
Уровень |
||
|
ция характе- |
ВЧ |
мощ- |
|
|
ристик |
фер- |
ности |
на |
|
ритового пе- |
выходе |
||
|
реключателя |
|
|
|
|
|
|
|
|
Изменение |
Изменение |
||
порогов |
характерис |
||
срабатыва- |
тик |
вход- |
|
ния кванто- |
ного сигна- |
||
вания |
|
ла, |
вероят- |
|
|
ное |
расп- |
|
|
ределение |
|
|
|
амплитуды |
|
Ток в |
ка- |
Изменение |
|
тушке |
под- |
частоты |
|
магничива- |
входного |
||
ния |
|
сигнала |
|
|
|
|
|
>>>Параев Ю.И.-В кн. Труды Сибир.физтех ин-та, 42,
1963
>>>Кошелев ВВ, Таланов ВИИзв высш уч заведений 6, 1963,3.Применен экстремальный регулятор с моделирующим воздействием

|
№ |
Объект |
Показатель |
Регули- |
Возмущаю |
Прин- |
Литерату |
|
|
пп |
управления |
качества |
рующие |
щие |
цип ре- |
ра |
|
|
|
|
(зкстрем) |
воздейс |
воздей- |
гулиро- |
|
|
|
|
|
|
твия |
ствия |
вания |
|
|
|
|
|
|
|
|
|
|
|
|
15 |
Экстремаль- |
Минимум |
Настро |
Изменение |
>> >> |
Красов- |
|
|
|
ный прием |
отклонения |
йка ге- |
характе- |
|
ский АА- |
|
|
|
сигналов |
между при- |
нериру- |
ристик |
|
Автома- |
|
|
|
|
нимаемым и |
емого |
принимае- |
|
тика |
и |
|
|
|
генерируе- |
сигнала |
мого |
|
телеме- |
|
189 |
|
|
мым |
|
сигнала |
|
ханика |
|
|
|
сигналами |
|
|
|
1961,22,6 |
||
|
16 |
Экстремаль- |
Максималь- |
|
Совокуп- |
>> >> |
РЖ |
А и |
|
|
ный |
ное значение |
|
ность |
|
ВЧ,1985, |
|
|
|
селектор |
сигнала |
|
сигналов |
|
10, |
реф |
|
|
сигнала |
|
|
|
|
10А126П |
|
|
17 |
Уравнове- |
Выходное |
Регули- |
Изменения |
>> >> |
Грине- |
|
|
|
шивающиеся |
напряжение |
руемые |
измеряе- |
|
вич |
ФБ- |
|
|
мосты и по- |
моста |
плече- |
мой |
|
Измери- |
|
|
|
тенциометры |
|
вые |
величины |
|
тельная |
|
|
|
переменного |
|
сопроти |
|
|
техника, |
|
|
|
тока |
|
вления |
|
|
1961,12 |
|
|
|
|
|
моста |
|
|
Системы |
|
|
|
|
|
|
|
|
|
|
190
|
|
|
|
|
|
|
|
предназначены |
|||
|
|
|
|
|
|
|
|
для |
автоматичес- |
||
|
|
|
|
|
|
|
|
кого |
измерения |
||
|
|
|
|
|
|
|
|
емкости |
|
и тан- |
|
|
|
|
|
|
|
|
|
генса угла потерь |
|||
|
|
|
|
|
|
|
|
в |
конденсаторах |
||
|
|
|
|
|
|
|
|
емкости |
и |
сопро- |
|
|
|
|
|
|
|
|
|
тивления, |
индук- |
||
|
|
|
|
|
|
|
|
тивности , и др. |
|||
18 |
Синхронно- |
Средне- |
Регули- |
Управля- |
>>> |
|
[14] |
||||
|
следящая |
|
квадрати- |
рующие |
ющие |
|
|
|
|
|
|
|
система |
с |
чная |
воздей- |
воздей- |
|
|
|
|
|
|
|
автоколеба- |
ошибка |
ствия |
ствия |
|
|
|
|
|
||
|
тельным |
|
системы |
|
|
|
|
|
|
|
|
|
управлением |
|
|
|
|
|
|
|
|
||
19 |
Системы ав- |
Средне- |
Парамет- |
Внешние |
>>> |
|
[14 22 67] |
||||
|
томатичес- |
квадрати- |
ры кор- |
возмуще- |
|
|
|
|
|
||
|
кого |
управ- |
чная |
ректиру- |
ния, из- |
|
|
|
|
|
|
|
ления |
с |
пе- |
ошибка |
ющего |
меняю- |
|
|
|
|
|
|
ременными |
|
контура |
щие пара- |
|
|
|
|
|
||
|
параметрами |
|
|
метры |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|