

Учебное пособие 2015
.pdfЭкстремальное значение Kу определяется из условия
dKd y mz2 z2 Ky Ky.опт 0,
где mz2 и z2 заданы выражениями (1.86) и (1.87).
При заданных функциях Кc и Тс находим оптимальное значение коэффициента усиления корректирующей цепи
Ку.опт(t).
ГЛАВА 2 ЭКСТРЕМАЛЬНЫЕ СИСТЕМЫ С АКТИВНЫМ
ПОИСКОВЫМ ВОЗМУЩЕНИЕМ
2. 1. Метод синтеза непрерывных экстремальных систем управления
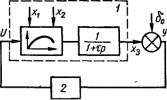
В основе метода лежит замена нелинейного экстремального объекта с постоянными параметрами при наличии помех на его входе и выходе линейным звеном со случайно флуктуирующими параметрами, и затем применение к такому объекту метода синтеза оптимального фильтра, предложенного в работе Калмена и Бэси [84]. Объект аппроксимируется последовательным соединением (рис.
2.1) нелинейного параболического звена и линейного инерционного
звена первого порядка. При этом возмущения 1 и 2
представляют собою броуновские движения (процессы на выходах интеграторов, которые возбуждаются белым шумом), помеха 0 — белый шум. Возмущениях, и 1 -сдвига от точку
экстремума по горизонтали и вертикали соответственно. Система дифференциальных уравнений, описывающая
динамику такого объекта, записывается в виде
dx1 |
|
|
|
|
(2.1) |
|
dt |
1, |
|||||
|
|
|||||
|
|
|
|
|||
dx2 |
|
|
(2.1а) |
|||
dt |
2, |
|||||
|
|
|
||||
|
|
|
|
|||
|
|
113 |
|
|||
|
dx3 |
|
1 |
1 |
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
k u x1 |
x2 |
x3 |
(2.1б) |
|||
|
dt |
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|||||
(k—крутизна параболы). |
|
|
|
|
|
|
|
|
|||||
При этом наблюдаемый сигнал |
|
|
|
||||||||||
|
|
|
|
|
|
|
y x3 0 |
|
|
(2.1в) |
|||
Цель управления — минимизировать величину потерь |
|||||||||||||
|
|
|
|
|
|
|
|
1 |
k(u x )2 . |
|
(2.2) |
||
|
|
|
|
|
f |
|
|
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Минимизация (2.58) может быть достигнута, если известна координата x1 (t) . Обозначим наилучшую оценку величины x1 (t) через m1 (t) , а наилучшие приближения к
m (t) |
— через m(1) |
(t) . Введем понятия «умышленной» |
|
|||
1 |
1 |
|
|
|
|
|
(intentional) ошибки |
|
|
|
|
||
|
|
g (1) (t) u(t) m(1) |
(t) |
(2.3) |
||
|
|
|
|
1 |
|
|
и «неумышленной» (unintentional) ошибки |
|
|
||||
|
|
e(1) |
(t) x (t) m(1) |
(t) |
(2.4) |
|
|
|
1 |
1 |
1 |
|
|
Первая ошибка названа «умышленной», так как для оценки параметров объекта приходится на управляющий сигнал и(t) накладывать пробный (поисковый) сигнал; вторая ошибка является результатом неточной оценки положения экстремума.
Из уравнений (2.3) и (2.4) следует
u x |
g (1) |
e(1) |
d e |
, |
(2.5) |
1 |
|
1 |
1 |
|
|
так как сигналы g и e1 получаются простой заменой
114
m(1) |
(t) на m (t) |
в (2.3) и (2.4); |
|
|
||||||||||||
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С учетом (2.5) перепишем (2.2) в виде |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
k(g e )2 |
|
1 |
k(g (1) |
e(1) )2 |
|
||||
|
|
f |
|
|||||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
2 |
|
1 |
|
2 |
|
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
(2.6) |
|||||
|
|
|
|
1 |
k g (1)2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||||
|
|
|
e(1)2 |
kg (1) e(1) |
|
|
||||||||||
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Строго говоря, член kg (1) e(1) в равенстве (2.6), который
представляет собою корреляцию между «умышленной» и «неумышленной» ошибками, не равен нулю. Если учесть, что
сигнал g (1) (t) образован поисковым сигналом (в дальнейшем под g (1) (t) понимается поисковый сигнал), а сигнал e(1) (t)
есть следствие действия на систему внешних помех, которые некоррелированы с поисковым сигналом, то такое рассуждение имеет лишь качественный характер и, вообще говоря, не строго. Обозначим через x(t) сигнал х(t),
прошедший через звено первого порядка с постоянной времени η. Тогда сигнал x3 с учетом (2.4) равен
x |
|
|
|
1 |
k(u x )2 |
x |
|
|
|
1 |
k(g (1)2 |
2e(1) g (1) |
e(1)2 ) x |
|
3 |
|
2 |
|
2 |
||||||||||
|
|
|
2 |
1 |
|
|
|
2 |
|
1 |
1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
а наблюдаемый сигнал у равен:
y x3 0 kg(1) x1 x2 12 k g (1)2 2m(1) g (1) e1(1) 2 0 .
(2.7).
Как будет показано ниже, в синтезируемом экстремальном регуляторе используется для управления не наблюдаемый сигнал у,
а сигнал y (1) ,определяемый уравнением
|
y(1) y |
1 |
k g (1)2 |
|
2m(1) g (1) |
C |
, |
|
|
(2.7а) |
|||||
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
11 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||||
где C |
-дисперсия сигнала e(1) 2 , т. е. |
C |
e(1)2 . Обозначим |
||||||||||||
11 |
1 |
|
|
|
|
11 |
1 |
|
|
|
|
|
|||
через |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g (1) (t) e(1)2 C |
. |
|
|
|
|
|
(2.7б) |
||||||
|
|
|
|
|
1 |
|
|
11 |
|
|
|
|
|
|
|
Тогда уравнение сигнала (2.7а) с учетом (2.7) и (2.9) |
|||||||||||||||
перепишется в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
y(1) kg (1) x x |
|
|
1 |
k g (1) |
(t) |
|
|
. |
(2.7в) |
|||||
|
2 |
|
0 |
||||||||||||
|
1 |
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Линеаризация системы сводится к отбрасыванию члена
ε k2 g (1) (t) в уравнении (2.7в), что справедливо при малых
k, а также в том случае, когда частотный спектр этого сигнала существенно меньше по мощности, чем частотный спектр сигнала x2 , поскольку влияние нелинейности сводится к
добавлению kx2 величины ε.
Тогда приближенное значение выходного сигнала может
быть выражено |
(0) kg(1) x x |
|
|
|
|
|
y |
|
0 |
. |
(2.8) |
||
|
1 |
2 |
|
|
|
|
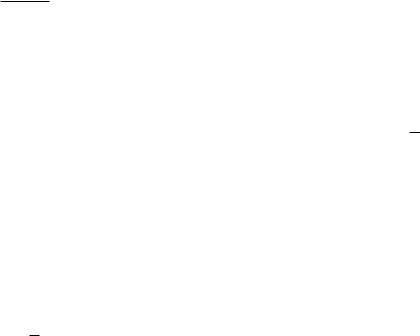
Задача сводится к выделению из сигнала y (0) |
величины |
|||||
x1 (2.8). На рис. 2.2 приведена блок-схема, где l - линейный |
||||||
элемент со случайно изменяющимся наклоном x1 |
и |
|||||
аддитивным шумoм x2 |
на выходе; 2 — линейное инерционное |
|||||
звено; |
|
|
|
|
|
|
|
116 |
|
|
|
|
|
115
3 — оптимальный фильтр для оценки m1(0) ; математического
Рис. 2.2.Эквивалентная блок-схема синтезируемой системы.
ожидания сигнала x1 . При этом kg (1) (t) в данной схеме
является пробным (поисковым) сигналом, который вводится в
систему для оценки случайно изменяющегося коэффициента усиления x1 . Показатель качества управления приближенно выражается (2.6):
|
|
1 |
k g (1)2 |
e(1)2 |
. |
(2.9) |
|
f |
|||||||
|
|||||||
2 |
|
1 |
|
|
|||
|
|
|
|
||||
Поэтому f можно уменьшить, если сделать поисковый сигнал g (1) (t) предопределенной функцией времени. Система,
представленная на рис. 2.2, описывается системой дифференциальных уравнений (в канонической форме) следующего вида (см. (2.1) —( 2.1в)):
117
|
x |
|
0 |
0 |
|
0 |
|
|
x |
|
|
|
|
|
||||||||||
d |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
x |
2 |
|
0 |
|
0 |
|
x |
2 |
|
|
|
|
, |
(2.10) |
||||||||
|
|
|
|
|
|
|||||||||||||||||||
dt |
|
|
kg |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
(0) |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
x3 |
|
|
|
|
x3 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
y(0) x(0) |
|
0 |
. |
|
|
|
|
|
|
|
|
(2.11) |
|||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Система может быть записана в векторной форме:
dx0 |
|
a(t)x0 |
, |
|
(2.12) |
|
dt |
|
|||||
|
|
|
|
|
||
y(0) |
S' x(0) |
|
0 |
. |
(2.57) |
|
|
|
|
|
|
|
|
Здесь а (t) — матрица в правой части (2.10); S' —вектор-строка [0, 0, 1].
Пусть Ь — матрица спектральных плотностей белых шумов b1 и b2 .
b11 |
b12 |
0 |
|
|
|
|
|
|
|
b b21 |
b22 |
0 |
, |
|
|
0 |
0 |
0 |
|
|
|
|
|
|
математические ожидания переменных x2 и x3 —
соответственно m2(0) и m3(0) , а спектральная плотность помехи
0 b00 .
В[84] показано, что ковариационная матрица
C/cov ху = х(t)y(t) cov x x(t) 2 / и математическое ожидание
x1
m(0) случайного вектора x x2 определяется из
x3
118
системы уравнений:
|
|
|
|
|
dm(0) |
am(0) |
1 |
|
CSy(0) S' m(0) , |
(2.14) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
b00 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
dC(0) |
ac ca' b |
1 |
CSS'C . |
(2.15) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
b00 |
|
|
|
|
|
|
|
|
||||
|
При этом элемент C11 матрицы С означает, очевидно, |
|||||||||||||||||||||||||||
дисперсию сигнала ошибки e(1) 2 . Обозначим поисковый |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
сигнал kg (1) (t) через r ( t) . Здесь. r — амплитуда |
|
|||||||||||||||||||||||||||
поискового сигнала; ω — частота; ψ отражает форму |
|
|||||||||||||||||||||||||||
поискового сигнала. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Введем безразмерныe нормированные параметры, такие, |
|||||||||||||||||||||||||||
что в новом масштабе спектральные плотности b00 , b11 , |
b33 |
|||||||||||||||||||||||||||
становятся |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
B11 B22 B00 1. |
|
||||||||||||||||||
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
R |
|
b11 |
r |
, |
|
b22 |
, |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b22 |
|
|
|
|
b00 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
b00 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
, |
T t(b b ) |
|
, |
|
|||||||||||||||||
|
|
|
|
|
|
2 |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
b22 |
|
|
|
00 |
22 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
b12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b12 |
|
|
sin , - белый шум с единичной |
|
||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||
b11b22
спектральной плотностью;
119
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
- белый шум с матрицей (спектральных плотностей). |
||||||||||||||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.15a) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
X 1M1 E1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
x1 , m1 , e1 , |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
b11 b00b22 |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
X |
|
|
M |
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
, m |
, e |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
2 |
|
4 |
b00b22 |
|
|
|
|
|
|
2 |
2 |
|
|
|
|
2 |
|
, |
|
|||||||||||||||
|
|
|
|
|
X 3 M 3 E3Y |
|
|
|
|
|
|
|
|
|
x3 , m3 , e3 , y |
|
||||||||||||||||||||||||||||||||
|
|
C11 |
|
|
1 |
|
|
|
|
|
C11 ; C12 |
,C13 |
|
|
|
|
|
|
|
1 |
|
|
|
C12 ,C13 , |
(2.16) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
b11 |
|
b00b22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b00b11 |
|
|
|
|
||||||||||||
|
|
|
|
|
C22 ,C23 ,C33 |
|
|
1 |
|
|
|
|
C22 ,C23 ,C33 , |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b00b22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
KG (1) (T ) R ( T ) |
|
|
|
|
b11 |
kg (1) (t), |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b22 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C33 C33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Обозначим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
k 2b |
; |
|
|
|
b00 |
|
; |
|
|
|
|
b00 |
. |
(2.17) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
1 |
|
2 |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
00 |
|
|
|
|
|
|
b11 |
|
|
|
|
|
|
|
|
|
b12 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
С учетом (2.16) развернем систему уравнений (2.14) и (2.15):
120
|
|
|
|
|
|
|
|
|
|
|
|
dm(0) |
C ( y(0) |
m(0) ), |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
(2.17а) |
||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
13 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
dm(0) |
C |
|
|
( y(0) |
m(0) ), |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
(2.17б) |
|||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
dm(0) |
r ( t)m(0) m(0) |
m(0) |
C |
|
( y(0) m(0) ), |
|
|||||||||||||||||||||||||||||||||
3 |
|
|
|
(2.17в) |
||||||||||||||||||||||||||||||||||||
|
|
|
33 |
|||||||||||||||||||||||||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
m(0) |
|
[r ( t)m(0) |
m(0) C |
33 |
( y(0) |
m(0) )] |
3 |
, |
(2.17г) |
||||||||||||||||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
||||||
|
|
|
|
|
|
|
dC11 |
|
1 C 2 |
, |
dC12 |
|
sin C C |
|
, |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
dT |
|
|
|
|
13 |
|
|
dT |
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dC22 |
1 C |
2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dT |
|
|
|
|
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
dC13 |
1 R (T )C |
1C |
C C |
, |
|
|
|
(2.18) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
dT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
12 |
|
13 |
33 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
dC23 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
R (T )C |
|
|
C |
C |
23 |
C |
33 |
, |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
dT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
12 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
dC33 |
2 2 1 R (T )C 1C |
|
|
C |
2 . |
|
||||||||||||||||||||||||||||||||
|
|
|
23 |
|
||||||||||||||||||||||||||||||||||||
|
|
|
dT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
33 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
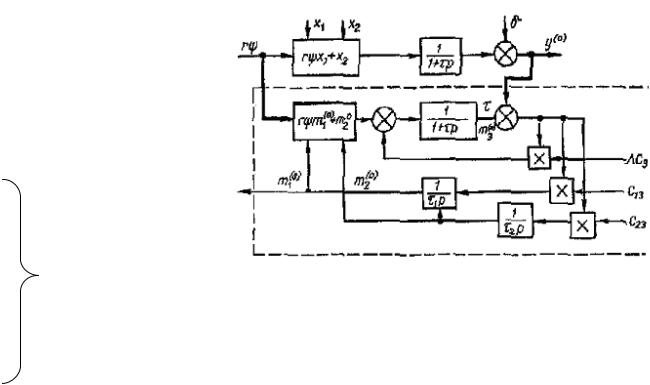
Если положить в уравнение (2.17), что C13 , C23 , C33
представляют собою некоторые известные функции времени (сигналы), то система (2.17 а, б, в) описывает схему оптимального демодулятора, который наилучшим образом оценивает величину m1(0) — математическое ожидание сигнала x1 , т. е. элемент 3 в блок-схеме рис. 2.2. Схема этого фильтра
приведена на рис. 2.3.
Рис. 2.3. Синтезированная блок-схема
оптимального фильтра.
Сигналы C13 , C23 , C33 находятся из системы уравнений (2.18) для заданных поисковых сигналов k ( ,t) либо с
помощью аналитического решения этих уравнений, либо с помощью моделирования или численного решения. Уравнения (2.18) моделировались и решались для сигналов k ( ,t) при
различных формах сигналов ψ, амплитудах r и частотах ω с целью нахождения оптимальных формы, частоты и амплитуды пробных сигналов, минимизирующих C11 (дисперсию сигнала
ошибки). Формы сигналов C13 , C23 , C33 для разных k ( ,t) представлены на рис. 2.4. При этом оказалось, что оптималь
122
121
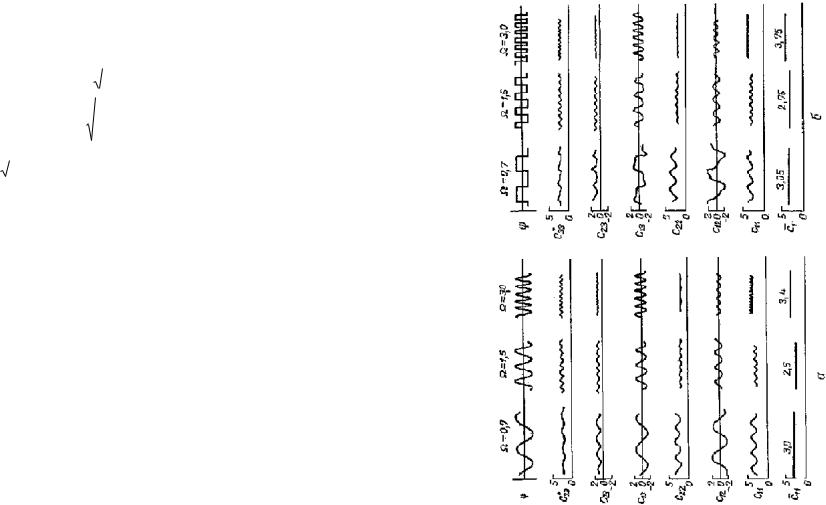
ной формой поисковых движений является синусоида, а остальные оптимальные параметры настройки будут
|
|
|
opt |
|
1 |
|
|
|
, |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
1 |
2 |
|
|
(2.19) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ropt |
|
3 |
|
J |
0 |
. |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
m(0) |
, m(0) |
и m(0) |
|
||||||||||
Здесь J |
cos |
1 2 . Оценки |
, получены |
|||||||||||||||
|
||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
нами на основе линейной модели объекта, выходной сигнал,
которой равен y (0) . В исходной же задаче нами используется
сигнал y (1) , определяемый из (2.7а). Оценки |
m , m |
2 |
, m |
3 |
, |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||
полученные в результате наблюдения за y (1) (t) обозначим |
|
||||||||||||||||||||||||
соответственно через |
m (1) , |
m (1) и |
m(1) |
и подставим их в си- |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стему уравнений (2.17а, б, в). Найдем способ получения |
m (1) |
, |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
m2(1) и m3(1) |
из исходного сигнала у, воспользовавшись |
|
|
|
|
||||||||||||||||||||
уравнениями (2.8а) и (2.176) и учтя обозначение kg r : |
|
||||||||||||||||||||||||
|
(1) |
|
(1) |
|
|
k |
|
(1)2 |
|
|
|
(1) |
|
|
|
(1) |
|
|
(1) |
|
|
|
|
||
y |
|
m |
3 |
y |
|
|
(g |
|
C ) m |
2 |
C |
33 |
( y |
|
m |
3 |
) |
|
(2.20) |
||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
или
y(1) m(1) |
y , |
(2.20б) |
3 |
|
|
где μ равно второму слагаемому правой части (2.20)
Рис. 11.4. Формы сигналов.
124
123
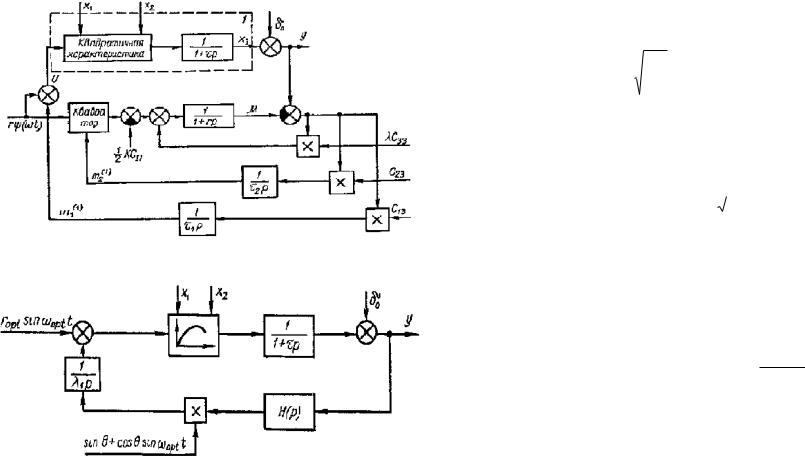
Рис. 2.5. Пример синтезированной экстремальной системы.
Рис. 2 6. Упрощенная блок-схема экстремальной системы для случая, когда x1 x2 .
Таким образом, вместо сигнала y(1) m3(1) в уравнениях
(2.17а) — (2.17г) используется сигнал у + μ. Структурная схема синтезированного таким образом экстремального
125
регулятора представлена на рис. 2.5.
Существенное упрощение блок-схемы получается при
малых R |
|
b11 |
r , т. е. когда шум x |
|
много мощнее шума x . |
|||||||||
|
|
2 |
||||||||||||
|
|
b22 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрение уравнений (2.17а, б, в) и (2.18) при |
|
|||||||||||||
r ropt , opt |
показывает, что блок-схема системы |
|
||||||||||||
приводится к виду (рис. 2.6), где |
|
|
|
|
|
|
|
|
||||||
|
H ( p) |
|
2 p(1 |
p) |
|
|
. |
(2.21) |
||||||
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
|
|
|
|
|
|
p 2 |
|||||
|
1 2 |
2 |
p |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
Как следует из рис. 2.6, при отсутствии корреляции между 1 и 2 (или x1 и x2 ), т. е. при sin ζ=0, оптимальный регулятор является простым оптимизатором с синхронным детектором и корректирующим звеном Н (р) Если же и 0 ( 0) , т. е. отсутствует инерционность на выходе объекта, то
H ( p) |
2 p |
|
2 p 1 . |
(2.21а) |
В этом случае корректирующее устройство представляет собою реальный дифференциатор.
126
2. 2. Переходные и установившиеся процессы в импульсных системах экстремального регулирования.
Динамика импульсных систем экстремального регулирования (ИСЭР) описывается нелинейными разностными уравнениями. Как известно, разностные уравнения представляют собою достаточно простые рекуррентные соотношения. Поэтому построение переходных процессов в импульсных экстремальных системах может быть осуществлено численным решением соответствующих рекуррентных соотношений. Анализ устойчивости установившегося состояния, а также поведения СЭР при равномерном дрейфе экстремума требуют разработки специальных методов применительно к конкретным типам ИСЭР. Рассмотрим методы исследования переходных процессов в импульсных экстремальных системах.
2.2.1. Метод составления разностных уравнений динамики ИСЭР.
Этот метод сводится к составлению несложных алгоритмов, легко реализуемых на простейших ЦВМ. Составление разностных уравнений динамики основано на интегрировании дифференциальных уравнений движения звеньев внутри одного периода регулирования (используя
безразмерное время t Tt , где Т — интервал дискретности) и
последующей дискретизации полученных решений
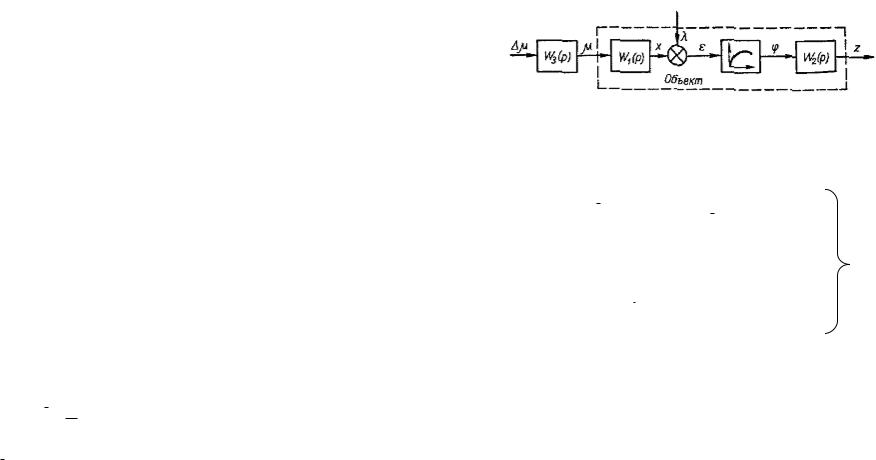
(приравнивая t 1) [40, 63]. Допустим, что объект представляет собою параболическое звено с инерционными
127
элементами W1 ( p) на входе и W2 ( p) на выходе (рис 2.32). Если W1 ( p) и W2 ( p) — инерционные звенья первого порядка,
то динамика объекта внутри s-гo периода дискретности описывается уравнениями:
Рис. 2.7. Аппроксимация объекта оптимизации.
|
|
dxS (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
xS (t) k1 |
S (t), |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
d t |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
(t) k |
H |
[x |
S |
(t) |
S |
(t)]2 |
, |
|
|
||||||||||||||
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.22) |
|||||||
|
S |
f (s), |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zS (t) kH |
[xS ( ) S ( )]2 ( |
t |
)d |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь |
1 , k1 — постоянная времени и коэффициент усиления |
|||||||||||||||||||||||
|
|
|
первого звена, |
|
|
|
|
|
|
|
|
|||||||||||||
|
k H |
— коэффициент при параболе, |
||||||||||||||||||||||
S |
f (s) — дрейф экстремума по произвольному закону (в |
|||||||||||||||||||||||
случае переходного процесса S |
CONST ); |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
128 |
|
|
|
|
|
|
|
|||
t
(t) k2 e 2 — функция веса второго звена.
2
Решая эти уравнения для начальных условий |
|
|
|
|
|
|
|||||||||||||||
|
|
||||||||||||||||||||
xS (0) xS 1 , zS (0) zS 1 и т. д. и приравнивая |
t |
= 1, получим |
|||||||||||||||||||
систему разностных уравнений, описывающих динамику |
|
||||||||||||||||||||
объекта в переходном процессе (поиск из начального |
|
||||||||||||||||||||
состояния S CONST ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
xS dxS 1 (1 d ) S , |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
S |
k |
H |
( x |
S |
)2 |
, |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
z |
S |
k |
H |
[( |
S 1 |
)2 2(1 d )( |
S 1 |
) |
S |
|
(2.23) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
(1 d ) 2 d (1 d )(x |
S 1 |
|
S |
)2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 d (xS 1 S )( S )].
Кэтим уравнениям следует присоединить уравнение сервомотора (на рис. 2.6—Wз (s))
S |
S 1 S , |
(2.24) |
и соответствующего регулятора, например разностного регулятора с синхронным детектором
S (k S 1 aM )( 1)3 , |
(2.25) |
где k -- коэффициент усиления регулятора,
aM — амплитуда модуляции;
или присоединить уравнение релейно-импульсного регулятора
129
S q sign zS 1 sign S 1 , |
(2.25a) |
где q — величина шага, или любого другого регулятора,
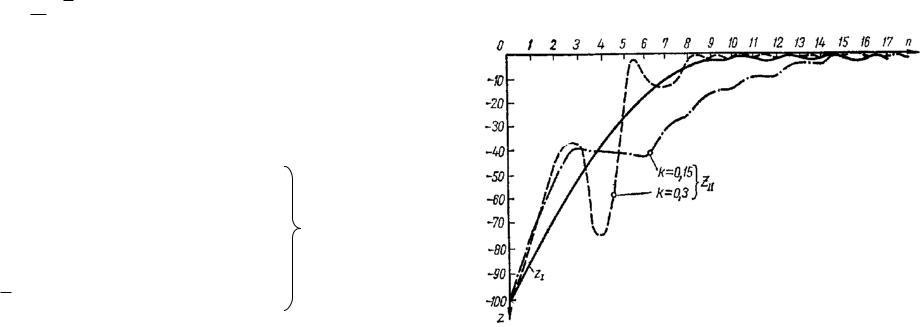
Рис. 2.7. Переходные процессы в релейно-импульной Z1 и пропорционально-импульсной системах Z11 .
например релейно-импульсного регулятора с импульсной коррекцией (об импульсной коррекции см. ниже) и т. д. Система рекуррентных уравнений (2.23) — (2.25) решается аналитически или на ЦВМ.
Типовые переходные процессы для регулятора с синхронным детектором при разных k (кривые Z11 ) и для релейно-импульсного регулятора с импульсной коррекцией
130