

Системы управления электроприводами роботов. Медведев В.А
.pdfВ. А. Медведев
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ РОБОТОВ
Учебное пособие
Воронеж 2019
Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный технический университет»
В. А. Медведев
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ РОБОТОВ
Учебное пособие
Воронеж 2019
УДК 681.513.6(075.8) ББК 39.33я7
М42
Рецензенты:
кафедра электроэнергетики Международного института компьютерных технологий, г. Воронеж
(зав. кафедрой д-р техн. наук, профессор А. Н. Анненков); Ю.С.Слепокуров,канд.техн.наук,доцент
Медведев, В. А.
Системы управления электроприводами робо-
М42 тов: учебное пособие / В. А. Медведев; ФГБОУ ВО «Воронежский государственный технический университет». – Воронеж: Изд-во ВГТУ, 2019. – 193 с.
ISBN 978-5-7731-0733-0
В учебном пособии приводятся алгоритмы и структурные схемы кинематического, динамического и адаптивного управления электроприводами. Рассматриваются вопросы аппаратной и программной реализации приведенных алгоритмов.
Предназначено для студентов направления 13.04.02 «Электроэнергетика и электротехника» (магистерская программа подготовки «Электроприводы и системы управления электроприводов») и направления 13.03.02 «Электроэнергетика и электротехника» (профиль «Электропривод и автоматика робототехнических систем») очной формы обучения.
Ил. 39. Табл. 6. Библиогр.: 31 назв.
УДК 681.513.6(075.8) ББК 39.33я7
Печатается по решению учебно-методического совета Воронежского государственного технического университета
ISBN 978-5-7731-0733-0 |
© Медведев В. А., 2019 |
|
© ФГБОУ ВО «Воронежский |
|
государственный технический |
|
университет», 2019 |
2
ВВЕДЕНИЕ
Промышленные роботы являются перспективным средством комплексной автоматизации производственных процессов. Их применение позволяет повысить производительность труда, избавляет человека от монотонных, физически тяжелых и вредных для здоровья работ.
Технические возможности промышленных роботов и эффективность их использования обуславливаются как совершенством манипулятора, так и характеристиками системы управления, которая строится по многоуровневой схеме.
На первом (исполнительном) уровне решаются задачи управления электроприводами манипулятора. На втором (тактическом) уровне по заданным угловым и линейным положению и скорости рабочего органа определяются соответствующие положения и скорости звеньев манипулятора. Третий (стратегический) уровень планирует движение рабочего органа в условиях неопределенности параметров.
Характеристики системы управления в значительной степени зависят от реализуемых на перечисленных уровнях методов и алгоритмов управления. Совокупность этих методов и алгоритмов, их аппаратная и программная реализация рассмотрены в настоящем учебном пособии.
Дисциплина «Системы управления электроприводами роботов» соответствует программам подготовки магистров по направлению 13.04.02 «Электроэнергетика и электротехника» и бакалавров по направлению 13.03.02 «Электроэнергетика и электротехника».
Цель дисциплины состоит в подготовке студентов направлений 13.04.02, 13.03.02 к инженерной деятельности по разработке систем управления электроприводами роботов.
При изучении дисциплины необходимо знание математики, физики, информатики, теоретических основ электротехники, электроники и схемотехники, силовой электроники, теоретической механики, электрического привода, электрических и электронных аппаратов, теории автоматического управления, основ вычислительной техники.
3
Результаты изучения дисциплины имеют самостоятельное значение, а также наряду с дисциплинами «Микропроцессорная техника в робототехнических системах», «Исполнительные системы роботов», «Информационные устройства в робототехнике», «Программирование роботов и робототехнических систем», «Моделирование систем управления электроприводами роботов» и «Технология роботизированного производства» на завершающей стадии обучения определяют квалификацию студентов как специалистов в области робототехники.
Впервой главе учебного пособия рассматриваются динамические модели трехкоординатных манипуляторов, работающих в декартовой, цилиндрической, сферической и угловой системах координат, а также динамические модели исполнительных электроприводов.
Во второй главе приведены решение прямой и обратной задач о положении и скорости для трехзвенных манипуляторов, работающих в различных системах координат, и кинематические алгоритмы управления манипулятором.
Третья глава посвящена вопросам планирования движения мобильного робота в рабочем пространстве с препятствиями, а также в пространстве обобщенных координат с помощью сплайн-функций.
Вчетвертой главе рассматривается динамическое управление манипулятором, в том числе алгоритмы позиционного управления манипуляторами конкретных кинематических схем, особенности контурного и силового управления.
Впятой главе приведены структуры адаптивных систем управления с эталонной и настраиваемой моделями, а также математическое описание робота с угловой системой координат и самонастраивающейся системой управления электроприводами.
Шестая глава посвящена вопросам аппаратной и программной реализации рассмотренных алгоритмов управления электроприводами на основе микропроцессорной техники.
4
1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ МАНИПУЛЯТОРОВ ПРОМЫШЛЕННЫХ РОБОТОВ
1.1. Управление манипуляторами в реальном масштабе времени
Применение общей теории управления в технических системах к управлению роботами является трудной задачей ввиду сложности и существенной нелинейности их математических моделей. Для достижения высокой скорости их перемещения и точности позиционирования необходимы как применение известных методов этой теории, так и разработка новых алгоритмов, использующих при управлении динамические модели манипуляторов. В процессе управления возникает необходимость в решении прямой или обратной задачи динамики.
Прямая задача динамики связана с определением движения робота при заданных силах и моментах, действующих в сочленениях манипулятора; обратная задача динамики состоит в расчете сил и моментов для выполнения заданного движения. При этом формирование управляющих воздействий должно повторяться с большой частотой, по возможности не ниже 50 Гц, поскольку резонансная частота большинства современных манипуляторов составляет приблизительно 10 Гц.
Проведение вычислений в реальном времени, т. е. не реже чем каждые 20 мс, требует применения современных вычислительных машин, причем управление манипуляторами может при конкретных условиях потребовать применения нескольких процессоров.
При управлении манипуляторами в реальном времени целесообразно использование методов, ориентированных на конкретные кинематические схемы, с целью экономии аппаратных и программных средств.
При формировании динамических моделей будем предполагать, что параметры звеньев манипулятора (длины, массы, моменты инерции и т. д.) известны, и считать их постоянными.
5
Координаты сочленений (углы или линейные перемещения звеньев) и их производные будем считать независимыми переменными. Все остальные величины, используемые при построении математических моделей, будут рассматриваться как функции координат сочленений (обобщенных координат).
В настоящей главе рассмотрим сначала формирование динамических моделей механической части манипуляторов, а затем динамических моделей электроприводов в сочленениях робота как составляющих полной модели манипулятора.
1.2. Общие уравнения динамики механической части исполнительных механизмов
Соотношения, определяющие положения, скорости и ускорения звеньев механизма с учетом действующих на него сил и моментов, называют уравнениями динамики. Для вывода таких уравнений будем использовать упрощенные модели манипуляторов, поскольку для реальных моделей уравнения динамики получаются слишком сложными для анализа.
Примем следующие допущения. Звенья будем представлять в виде стержней, причем их масса сосредоточена в центре масс. Исполнительный механизм с n степенями подвижности будем рассматривать как механическую систему, для которой выполняются уравнения Лагранжа второго рода.
Необходимо отметить, что уравнения Лагранжа обладают определенными ограничениями при переходе от упрощенных моделей к реальным. Их применяют в предположении, что все связи являются голономными, т. е. наложенными только на координаты системы.
Выберем в качестве вектора обобщенных координат вектор q относительных перемещений звеньев. Рассмотрим механизм, образующий разомкнутую кинематическую цепь.
С учетом принятых допущений запишем для манипулятора уравнения Лагранжа второго рода:
d |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
P , |
j 1,2,...,n, |
(1.1) |
|
|
|
|||||||
|
|
|
|
|
|
|
j |
|
|
dt |
qj |
|
qj |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
6
где (q,q) – функция Лагранжа;
Pj – обобщенные силы, развиваемые электроприводами в степенях подвижности манипулятора.
Величина Pj имеет размерность момента (Н м), если обобщенная координата qj есть угол поворота. Если qj – линейное перемещение, то Pj имеет размерность силы (Н).
Функция Лагранжа представляет собой разность между кинетической энергией W(q,q ) и потенциальной энергией
П(q), т. е.
|
|
|
|
|
(q,q) = W(q,q ) – П(q). |
(1.2) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя (1.2) в (1.1), будем иметь |
|
|||||||||||
|
d |
W |
|
W |
|
П |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
P , |
j 1,2,...,n. |
(1.3) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
dt |
qj |
|
qj |
|
qj |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинетическая энергия исполнительного механизма равна сумме кинетических энергий Wj (q, q ) его звеньев
|
n |
(1.4) |
W(q, q ) = Wj (q, q ). |
||
|
|
|
j 1
Втом случае, если угловая скорость j-го звена совпадает со скоростью изменения соответствующей обобщенной координаты, его кинетическая энергия определяется по формуле
|
2 |
2 |
/2, |
(1.5) |
Wj (q,q) = mjVj |
/2 + Jj qj |
|||
где mj – масса звена;
Vj – скорость центра масс звена, вычисляемая в инерциальной (базовой) системе координат;
Jj – момент инерции звена относительно оси вращения; qj – угловая скорость звена.
Потенциальная энергия П(q) определяется как произведение массы всей системы на вертикальную координату x2 центра масс и ускорение g силы тяжести. Обозначим через x2j координаты центров масс звеньев. Понятно, что x2j = x2j(q),
7
поэтому энергия П(q) будет функцией обобщенных координат
n |
|
П(q) = –g mj x2j(q). |
(1.6) |
j 1
Знак «минус» свидетельствует о том, что вектор силы тяжести направлен вниз по оси Оx2 базовой системы координат.
Из уравнений (1.3)–(1.6) может быть получено следующее выражение:
|
|
n |
|
|
|
|
|
|
|
|
(1.7) |
|
|
A jv(q)qv Bj(q, q)+ Cj (q) = Pj, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v 1 |
d |
W |
|
W |
|
|
|||
n |
|
|
|
|
|
||||||
где A jv(q)qv Bj(q, q)= |
|
|
|
|
|
|
|
, |
|
||
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||
v 1 |
|
|
dt |
qj |
|
qj |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
C (q) |
П |
, ν 1 2 n |
, j = 1, 2, …, n . |
|
|||||||
|
|
||||||||||
j |
qj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, уравнения динамики исполнительного механизма с n степенями подвижности представляют собой связанную систему n обыкновенных дифференциальных уравнений второго порядка. Общий порядок системы равен 2n. Состояние механизма как динамической системы определяется 2n переменными qj,qj, j = 1, 2, ..., n.
Необходимо отметить, что в большинстве случаев на практике необходимо учитывать динамику только первых трех звеньев манипулятора. Последние три звена универсального робота часто имеют малые размеры, по сравнению с тремя первыми, и определяют ориентацию рабочего органа.
В связи с этим в разделах 1.3–1.6 мы рассмотрим уравнения движения трехкоординатных манипуляторов, работающих в различных системах координат: декартовой, цилиндрической, сферической и угловой, которые различаются соотношением кинематических пар поступательного и вращательного типа. При этом увеличение числа кинематических пар вращательного типа приводит к усложнению уравнений движения и усилению взаимовлияния степеней подвижности.
8
1.3.Уравнения движения манипулятора в декартовой системе координат
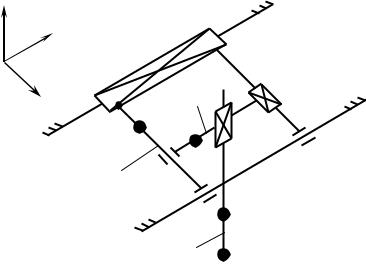
Расчетная схема трехкоординатного манипулятора, работающего в декартовой системе координат, приведена на рис. 1.1.
Массы звеньев 1, 2 и 3 обозначены через m1, m2 и m3 соответственно. Масса рабочего органа обозначена m. Трехкоординатный манипулятор имеет три поступательные кинематические пары. Данная кинематическая схема дает возможность исключить взаимное влияние координатных приводов, т. к. перемещения по различным координатам осуществляются вдоль взаимно перпендикулярных осей Ox1, Ox2, Ox3.
|
x3 |
x1 |
|
|
|
|
|
0 |
|
x2 |
|
|
|
|
|
|
|
2 |
|
|
|
m2 |
|
|
|
m1 |
|
|
|
1 |
|
|
|
|
m3 |
|
|
3 |
m |
|
|
Рис. 1.1. Расчетная схема трехкоординатного |
|
манипулятора в декартовых координатах
Уравнения Лагранжа для рассматриваемой схемы имеют
вид
d |
W |
|
W |
|
П |
|
|
|
|
||
|
|
|
|
|
|
|
|
F |
, |
j 1,2,3, |
(1.8) |
|
|
||||||||||
|
|
|
|
|
|
|
|
j |
|
|
|
dt |
xj |
|
xj |
|
xj |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
где Fj – силы, развиваемые в сочленениях электроприводами.
9