

Методическое пособие 659
.pdfОбозначим через V1, V2, V3 и V абсолютные (в декартовой системе) значения скоростей движения точек, в которых сосредоточены массы m1, m2, m3 и m. Выражения для соответствующих кинетических энергий будут иметь вид
W1 = m1V12/2 = m1 x12/2,
W2 = m2V22/2 = m2 ( x12 + x22)/2,
W3 = m3V32/2 = m3 ( x12 + x22 + x 32)/2,
(1.9)
Wm = m V32/2 = m ( x12 + x22 + x 32)/2.
С учетом (1.9) кинетическая энергия исполнительного механизма
|
|
|
|
|
|
2 |
|
|
|
|
1 |
2 |
|
2 |
) + |
|
W( x1 |
, x2 |
, x3)=[m1 x1 |
|
+ m2( x |
|
+ x 2 |
|
|||||||||
|
|
|
2 |
+ |
|
2 |
2 |
+ |
|
2 |
)]/2. |
|
(1.10) |
|||
+ (m3 + m)( x1 |
|
x |
|
x3 |
|
|
||||||||||
Потенциальная энергия П(x3) системы зависит только от переменной x3, и ее частные производные имеют вид
П / x1 = 0, |
П / x2 = 0, |
П / x3 = (m3 + m)g. |
(1.11) |
||
Частные производные от кинетической энергии: |
|
||||
W / x1 = |
x1(m1+m2+m3+m), |
W / x1 = 0, |
|
||
|
|
|
|
|
|
W / x2 |
= x2(m2+m3+m), |
|
W / x2 = 0, |
(1.12) |
|
|
|
|
|
|
|
W / x3 = |
x3(m3+m), |
|
W / x3 = 0. |
|
|
|
|
|
|
|
|
С учетом (1.11) и (1.12) из (1.8) находим уравнения динамики трехкоординатного манипулятора с декартовой системой координат:
(m1+m2+m3+m) x1 = F1, |
||
|
|
|
(m2+m3+m) x |
2 = F2, |
(1.13) |
|
|
|
|
|
F3. |
(m3+m) x3+(m3+m)g = |
||
10
Как видно из (1.13), взаимосвязь движений по координатам x1, x2 и x3 отсутствует.
Введем следующие обозначения: |
|
|
|
|
||
A1 = m1+m2+m3+m, |
A2 |
= m2 |
+m3 |
+m, |
(1.14) |
|
A3 = m3+m, |
C3 = (m3+m)g, |
|||||
|
||||||
тогда из (1.13) найдем выражения, соответствующие уравне-
нию (1.7):
A1 x |
1 = F1, |
A2 x |
2 = F2, |
A3 x |
3 + C3 = F3. (1.15) |
|
|
|
|
|
|
Уравнения (1.15) можно представить в векторной форме
Aq + C = P, |
(1.16) |
|
|
где A – диагональная матрица инерционных параметров; q – матрица ускорений обобщенных координат;
C – матрица гравитационных сил;
P – матрица обобщенных сил.
Матрицы A, q, C и P имеют следующий вид:
A1 |
0 |
0 |
|
|
|
|
0 |
A2 |
0 |
|
, |
A = |
|
||||
|
0 |
0 |
A3 |
|
|
|
|
|
|||
x1 q = x2 ,x3
0 |
|
|
F1 |
|
|
|
|
, |
|
|
. (1.17) |
C = 0 |
|
P = F 2 |
|
||
|
|
|
|
|
|
C3 |
|
|
F 3 |
|
|
1.4. Уравнения движения манипулятора в цилиндрической системе координат
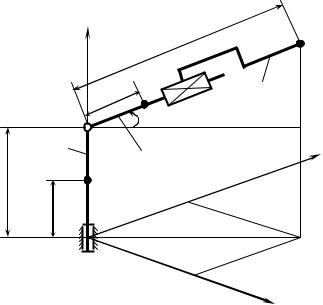
Расчетная схема манипулятора представлена на рис. 1.2. Обозначим через J1 момент инерции звена 1 относительно оси Ox3, массы звеньев 2, 3 и рабочего органа – m2, m3 и m соответственно. Геометрические размеры конструкции указаны на чертеже. Рассматриваемый трехкоординатный манипулятор имеет одну вращательную и две поступательные кинематические пары. Обобщенными координатами являются угол
поворота , высота подъема стрелы l и ее длина r.
11

|
x3 |
|
r |
|
|
m3 |
m |
|
|
|
|
|
||
l0 |
2 |
3 |
ro |
|
|
|
|
||
m2 |
J1 |
|
l |
x1 |
|
1 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
Рис. 1.2. Расчетная схема трехкоординатного манипулятора |
||||
|
в цилиндрических координатах |
|
||
Обозначим через Ws кинетическую энергию звена с номером s. Тогда кинетическая энергия механизма
3 |
|
W = Ws + Wm , |
(1.18) |
s 1
где Wm – кинетическая энергия рабочего органа. Кинетическая энергия звена 1 обусловлена вращатель-
ным движением с угловой скоростью , а кинетическая энер-
гия звена 2 – поступательным перемещением массы m2 вдоль оси Ox3. На этом основании имеем
W1( ) = J1 |
|
2 |
/2, |
|
2 |
/2. |
(1.19) |
|
W2(l |
) = m2l |
|||||
|
|
|
|
|
|
|
|
Обозначим через V3 и V абсолютные (в декартовой системе) значения скоростей движения точек, в которых сосредоточены массы m3 и m. В таком случае выражения для соответствующих кинетических энергий будут
W3 = m3V3 |
2 |
/2 = m3 |
|
13 |
2 |
|
|
|
2 |
|
|
2 |
)/2, |
|
|||
|
|
( x |
|
+x23 |
|
+x |
33 |
(1.20) |
|||||||||
Wm = mV |
2 |
/2 = m |
|
|
2 |
|
2 |
2 |
|
|
2 |
)/2, |
|||||
|
|
|
|||||||||||||||
|
|
( x1 |
|
|
+ x |
|
+ x3 |
|
|
||||||||
где xs3, xs – координаты точек m3 |
и m соответственно. |
|
|||||||||||||||
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
Из чертежа находим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x13 = (r – r0)sin , |
|
|
|
|
x1 = r sin , |
|
||||||||||
x23 = (r – r0)cos , |
|
|
|
x2 = r cos , |
(1.21) |
|||||||||||
x33 = l, |
|
|
|
|
|
|
|
x3 = l. |
|
|
|
|
||||
Подставляя выражение (1.21) в (1.20), получим |
||||||||||||||||
|
|
|
|
|
2 |
2 |
|
|
2 |
|
2 |
]/2 |
, |
|||
W3(r,r, ,l) m3[r |
|
l |
(r r0) |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.22) |
|
Wm |
|
|
|
m[r |
2 |
2 |
2 |
|
|
2 |
]/2 . |
|||||
|
|
|
|
|
||||||||||||
(r,r, ,l) |
|
l |
r |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C учетом (1.18), (1.19) и (1.22) кинетическая энергия исполнительного механизма определяется из выражения
|
|
+ mr |
2 |
+ m3(r – r0) |
2 |
) |
2 |
+ |
||
W(r,r, ,l) [(J1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
+ (m3 |
+ m)r |
2 |
]/2. |
|
(1.23) |
||
+ (m2 + m3 + m)l |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
Потенциальная энергия П системы зависит только от переменной l:
П(l) = m1gx2*+m2(l – l0)g + (m3+m)gl, (1.24)
где m1, x2* – масса и положение центра масс звена 1. Обозначим через М момент в сочленении координаты
, через Fl, Fr обозначим силы, действующие в сочленениях поступательного типа. Уравнения Лагранжа будут иметь вид
d |
|
W |
|
|
W |
|
|
П |
|
M |
|
|
|
|
|
|
|
|
|
|
, |
||||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
d t |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
W |
|
|
W |
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
Fl , |
(1.25) |
||||||
|
|
|
|
||||||||||
|
|
|
|
l |
|
|
l |
|
|||||
d t |
l |
|
|
|
|
|
|
|
|
||||
d |
|
W |
|
|
W |
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
F |
. |
|
|||||
|
|
|
|
|
|||||||||
|
|
r |
|
|
r |
|
|
r |
|
r |
|
|
|
d t |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13
Производные от кинетической и потенциальной энергии:
|
|
2 |
|
2 |
|
W / = 0, |
|
||
W / |
= [J1+mr |
+m3(r – r0) |
] , |
|
|||||
W / l |
= (m2+m3+m)l , |
|
W / l = 0, |
(1.26) |
|||||
W / r |
= (m3 |
+m)r , |
W / r = [mr+m3(r – r0)] |
2 |
, |
|
|||
|
|
|
|
|
|
|
|
|
|
П / = 0, |
П / l = (m2+m3+m)g, |
П / r = 0. |
|
||||||
Из (1.25) и (1.26) находим уравнения динамики трехкоординатного манипулятора:
[J1 |
mr |
2 |
m3(r r0) |
] 2[mr m3(r r0)]r M , |
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
(m m |
m)l (m |
m |
m)g F |
l |
, |
(1.27) |
|||
|
|
|
2 3 |
|
2 |
3 |
|
|
|
|
|
|
|
(m3 m)r [mr m3(r r0)] |
Fr . |
|
|||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
Первое и третье уравнения системы (1.27) взаимосвяза-
ны, что свидетельствует о взаимовлиянии движений по углу и вдоль направления r.
Введем следующие обозначения:
A (r) J |
m (r r )2 mr2, |
|
|||
|
1 |
3 |
0 |
|
|
B (r,r, ) 2[mr m3(r r0)]r , |
|
||||
|
|
|
|
|
|
|
Al m2 m3 |
m, |
|
(1.28) |
|
Cl (m2 m3 m)g , |
|
|
|||
Ar m3 m, |
|
|
|
2 |
. |
Br (r, ) [mr m3 |
(r r0)] |
||||
C учетом (1.28) уравнения динамики трехкоординатного манипулятора в цилиндрических координатах приобретают вид
A (r) B (r,r, ) M , |
|
|
|
|
|
Al |
l Cl Fl, |
(1.29) |
Arr Br (r, ) Fr . |
|
|
|
|
|
14
Векторная форма записи уравнений (1.29) имеет вид
A(q)q |
+ B(q,q ) + C(q) = P, |
(1.30) |
|
|
|
где A(q), q – матрицы инерционных параметров и ускорений; B(q,q) –вектор, учитывающий взаимовлияние координат;
C(q) – вектор гравитационных сил; P – вектор обобщенных сил.
Обобщенными координатами для данного манипулятора
являются угол поворота стойки , высота подъема стрелы l и ее длина r.
Матрицы, входящие в уравнение (1.30), имеют вид
A (r)
A(q) = 0
0
q = l ,r
0 |
0 |
|
|
|
|
B (r,r |
, ) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Al |
, |
|
|
|
|
|
|
|
, |
||
0 |
B(q,q ) = |
Bl (l) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Ar |
|
|
|
|
|
Br (r, ) |
|
|
|||
|
|
0 |
|
|
|
|
M |
|
(1.31) |
||
|
|
|
|
|
|
||||||
C(q) = |
|
|
, |
|
P |
|
Fl |
|
|
||
Сl |
|
= |
. |
|
|||||||
|
|
0 |
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
В отличие от уравнения (1.16), в выражении (1.30) имеется матрица B(q,q ), обусловленная взаимовлиянием вращатель-
ного движения по координате и поступательного перемеще-
ния вдоль направления r. На движение по координате оказывают влияние как величина, так и скорость перемещения по r; и наоборот, движение по координате r зависит от угловой скорости вращения руки манипулятора. Взаимовлияние
движений проявляется также и в том, что в матрице A(q) по-
явился функциональный коэффициент A (r) вследствие того, что при перемещении вдоль координаты r изменяется момент инерции относительно оси вращения Ox3. В то же время матрица A(q) остается диагональной, что свидетельствует об отсутствии влияния ускорения при движении по какой-либо координате на движение по двум другим координатам.
15
1.5.Уравнения движения манипулятора
всферической системе координат
Расчетная схема манипулятора показана на рис. 1.3. Звено 1 имеет массу m1 и момент инерции J1 относительно оси вращения Ox2. Через m2 и m обозначена масса звена 2 и рабочего органа. Манипулятор имеет две вращательные и одну поступательную кинематические пары. Обобщенными коорди-
натами являются углы поворота 1, 2 и длина стрелы r.
x2 |
r |
m |
l
r0 |
m2 |
3 |
|
2 |
|
1 |
2 |
x1 |
|
|
|
m1, J1 |
|
|
l0
 1
1
x3
Рис. 1.3. Расчетная схема трехкоординатного манипулятора в сферических координатах
Уравнения Лагранжа в данном случае имеют вид
d |
|
W |
|
|
|
W |
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
M i, |
i 1,2, |
|||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
d t |
i |
|
|
i |
|
i |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.32) |
|
|
|
d |
|
W |
|
|
W |
|
|
П |
|
|||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
, |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
r |
|
|
r |
|
|
|
|
r |
|
|
|
|
d t |
|
|
|
|
r |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16
где M i, Fr – моменты и сила, развиваемые электроприводами. Звено 1 участвует только во вращательном движении, поэтому его кинетическая энергия определяется из выражения
|
|
1 |
2 |
/2, |
(1.33) |
W1( |
1 ) = J1 |
|
Звенья 2 и 3 совершают сложные движения. Обозначим через V2 и V абсолютные значения скоростей точек m2 и m. Тогда для кинетической энергии второго звена и груза имеем
W2 = m2V2 |
2 |
|
3 |
2 |
/2, |
Wm = mV |
2 |
/2 = m |
3 |
2 |
|
|
|
|
|||||||||
|
/2 = m2 хs2 |
|
|
хs |
/2. (1.34) |
||||||
|
|
|
s 1 |
|
|
|
|
|
|
s 1 |
|
Координаты xs2 точки m2 |
определяются из выражений: |
||||||||||
|
|
|
x12 r0 sin 1 cos 2 , |
|
|
||||||
|
|
|
x22 l r0 sin 2 , |
|
|
(1.35) |
|||||
|
|
|
x32 r0 cos 1 cos 2 . |
|
|
||||||
Дифференцируя xs2 |
по времени, получим |
|
|
||||||||
x12 |
r0 1 cos |
1 cos 2 r0 |
2 sin 1 sin 2, |
|
|||||||
|
|
|
|
|
|
2, |
|
|
|
|
|
|
|
|
x22 |
r0 2 cos |
|
|
|
(1.36) |
|||
x32 |
|
|
|
|
2 cos 1 sin |
2. |
|||||
r0 1 sin 1 cos 2 r0 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Квадрат скорости точки m2 равен
V22 =х122 +х222 +х322 = r02( 12 cos2 2+ 22 ). (1.37)
Координаты xs точки m:
x1 rsin 1cos 2 , |
|
x2 l rsin 2 , |
x3 rcos 1cos 2 . |
(1.38) |
|
x1 |
Дифференцируя xs по времени, получим |
|
|||
r sin 1 cos 2 |
r 1 cos 1 cos 2 |
r 2 sin 1 sin 2, |
|
||
|
|
|
|
|
|
|
x2 r |
sin 2 r 2 cos 2, |
(1.39) |
||
|
|
|
|
|
|
|
|
|
|
|
|
x3 |
r cos 1 cos 2 |
r 1 sin 1 cos 2 |
r 2 cos 1 sin 2. |
|
|
17
С учетом выражений для xs находим
V |
2 |
|
|
2 |
+ |
|
|
2 |
+ |
|
|
2 |
|
|
2 |
+r |
2 |
|
2 |
|
2 |
|
2 |
2 |
2. |
(1.40) |
|||||||
|
= х1 |
|
х2 |
|
х3 |
|
|
= r |
|
|
|
2 +r |
|
1 |
cos |
||||||||||||||||||
Подставляя (1.37) и (1.40) в (1.34), получим |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
W2 = m2r0 |
2 |
|
|
2 |
|
|
2 |
2 |
|
|
2 |
) / 2, |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
( |
1 |
cos |
|
+ |
2 |
|
|
|
(1.41) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
+r |
2 |
|
|
2 |
+r |
2 |
|
2 |
|
2 |
2) / 2. |
|
|
|
||||||||
|
|
Wm = m( r |
|
|
|
2 |
|
|
|
1 cos |
|
|
|
|
|||||||||||||||||||
Выражение для кинетической энергии W имеет вид |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
W1 + W2 + Wm = [(J1+m2r0 |
2 |
2 |
2+ |
||||||||||||||||||
W(r,r , 2, |
1 , 2 ) = |
|
|
cos |
|||||||||||||||||||||||||||||
|
+ mr |
2 |
|
|
2 |
|
|
|
|
2 |
|
|
+ (m2r0 |
2 |
+ mr |
2 |
|
2 |
2 |
]/2. |
(1.42) |
||||||||||||
|
|
cos |
2) |
1 |
|
|
|
|
|
|
) |
2 |
+ mr |
||||||||||||||||||||
Выражение для потенциальной энергии П системы:
П(r, 2 )=m1gl1+m2g(r0sin 2+l)+mg(rsin 2+l). (1.43) B соответствии с (1.42) справедливы равенства:
W / 1 = 0,
W / 2 = –[(m2r02+mr2)sin 2 2 12 ] /2,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
2 |
, |
|
|
|
(1.44) |
|||
|
|
|
|
|
|
|
|
|
W / r = mrcos |
|
2 |
1 |
+ mr |
2 |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 = (J1 + m |
2r0 |
2 |
|
|
|
2 |
|
2 + mr |
2 |
|
|
2 |
|
|
, |
|||||||||||||
|
|
|
|
|
W / |
|
|
cos |
|
cos |
|
2) 1 |
||||||||||||||||||||||||||
|
|
|
|
|
W |
/ |
|
|
2 = (m2r0 |
2 |
+mr |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
) 2 |
, W / r mr. |
||||||||||||||||||||||||||||
|
|
|
|
На основании (1.43) имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
П / 1 = 0, |
|
|
|
|
|
П / r = mgsin 2, |
|
(1.45) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
П / 2 = m2gr0cos 2 |
+ mgr cos 2. |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
Подставляя (1.44) и (1.45) в (1.32), получим уравнения |
||||||||||||||||||||||||||||||||||
динамики манипулятора в сферических координатах: |
|
|||||||||||||||||||||||||||||||||||||
(J |
1 |
|
J cos |
2 |
2 |
) |
J sin2 |
2 |
|
|
2 |
|
2mrcos |
2 |
|
|
|
M 1 |
, |
|||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
1r |
|
|
|
||||||||||||||
J |
|
|
2mr |
|
|
J sin2 |
2/2 (m |
|
r |
mr)gcos |
2 |
|
M 2 |
, (1.46) |
||||||||||||||||||||||||
|
2 |
|
|
2 r |
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
mrcos |
2 |
|
|
2 |
|
mr |
|
2 |
mgsin |
2 |
F |
, |
|
|
||||||||||||||||||
|
|
|
|
|
mr |
|
|
|
2 |
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
||||||||
где J = m2r02 + mr2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.47) |
||||||||||||
18
Уравнения системы (1.46) взаимосвязаны. Движение исполнительного механизма по какой-либо координате оказывает влияние на движение по двум другим.
Введем следующие обозначения:
|
|
|
A |
|
|
(r, |
) J |
1 |
J cos2 |
2 |
, |
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
B |
(r,r, |
, , |
|
2 |
) J sin2 |
|
|
|
2mrcos |
2 |
|
. |
||||||||||||||
|
1 |
2 |
1 |
|
|
|
|
|
|
|
|
2 |
|
1 |
2 |
|
|
|
2 |
|
1r |
|||||
|
A 2(r) J , |
|
|
C 2(r, 2) |
|
= (m2r0+mr)gcos 2, |
||||||||||||||||||||
|
|
|
, |
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
(1.48) |
|||
|
B 2(r,r, 2 |
1, 2) |
2 J sin2 2 1 |
|
2mr |
2r . |
|
|||||||||||||||||||
|
|
|
Ar m, |
Cr( 2) = |
mgsin 2, |
|
|
|
|
|||||||||||||||||
|
|
Br (r, 2, |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
. |
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
1 |
, 2) mrcos |
|
2 |
|
1 |
mr |
2 . |
|
|
|||||||||||||||
С учетом (1.41) уравнения динамики приобретают вид |
||||||||||||||||||||||||||
|
|
A 1(r, 2) 1 B 1(r,r, 2 |
, 1, 2) M 1, |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
A 2 |
(r) |
2 B 2 |
(r,r, 2, 1 |
, 2) |
C 2(r, 2) M 2 , (1.49) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Arr Br (r, 2 |
, 1 |
, 2) Cr ( 2) Fr . |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Векторная форма записи уравнений динамики манипулятора в сферических координатах имеет вид (1.30), где матрицы A(q), q, P, B(q,q) и C(q) определяются следующим образом:
A |
1 |
(r, |
|
2 |
) |
|
|
0 |
|
|
|
0 |
|
||
|
0 |
|
|
A 2(r) |
|
0 |
|
, |
|||||||
A(q) = |
|
|
|
|
|
|
|||||||||
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ar |
|
||||
|
B (r,r, |
|
, , |
) |
|
|
|||||||||
|
|
1 |
|
|
|
|
2 |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
B(q,q)= B 2 |
(r,r, 2 |
, 1, |
2) , |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Br (r, 2 |
|
|
|
|
|
2) |
|
|
|
||||
|
|
, 1, |
|
|
|
|
|||||||||
|
|
1 |
|
M 1 |
|||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
q |
|
|
, |
P = M 2 , |
|||
= |
|
|
|||||
|
r |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
Fr |
|
|
|
|
|
|
|
|
|
(1.50) |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
C(q)= C 2(r, 2) . |
||||||
|
|
|
|
|
|
Cr ( 2) |
|
|
|
|
|
|
|
|
|
19