

Методическое пособие 659
.pdfразвиваемого двигателем j-й координаты в системе подчиненного регулирования:
Mдj = kпj(qзадд j – qд j ) – kcj qдj . |
(5.36) |
|
|
Редуктор координаты c номером j осуществляет преобразование угла поворота вала двигателя qд j во вращательное движение механизма по соответствующей координате qj. Углы и скорости при этом связаны соотношениями
qзадд j = nj qзад j, qд j = nj qj, qдj = nj qj , j = 1, 2, (5.37) |
|
|
|
где nj – передаточное число редуктора. Подставляя выражения (5.37) в (5.36),
щее уравнение:
Mдj = njkпj(qзад j – qj) – njkcj
получим следую-
qj . |
(5.38) |
|
|
5.6. Стабилизация пространственного движения двухкоординатного манипулятора
Рассматриваемый двухкоординатный манипулятор, работающий в угловых координатах, может быть представлен в виде расчетной схемы, изображенной на рис. 5.4.
l1 |
x2 |
l01 |
|
q 1 |
|
m1 |
|
|
|
|
|
l02 |
m 2 |
|
|
|
l |
q2 |
|
|
|
|
2 |
x 1
0 

Рис. 5.4. РасчетнаяРис. 1. Расчетнаясхема двухкоординатногос ема манипулятораманипулятора, работающегоРис. 1. Расчетнаяв угловойсхемасистемеманипуляторакоординат
130
Уравнения движения манипулятора, полученные на основе аппарата Лагранжа, имеют следующий вид:
J1 q1+ J3 cos (q2 – q1)q2 – J3 sin (q2 – q1)q22 + J3 g cos q1 / l2 = M1,
(5.39)
J2 q2 + J3cos (q2 – q1)q1+ J3 sin (q2 – q1)q12 + J20 g cos q2 / l2 = M2,
где J1 = m1l012 – момент инерции первого звена относительно его оси вращения;
J3 = –m1l01 l2 ;
g – ускорение свободного падения;
M1, M2 – вращающие моменты, действующие в сочленени-
ях первого и второго звеньев;
J2 = m1l22 + m2l022 ;
J20 = m2 l2 l02 + m1l22.
В системе подчиненного управления двигателями постоянного тока с ПИ-регуляторами тока и П-регуляторами скорости и положения моменты в соответствии с (5.38) моменты M1, M2 определяются из выражений
M1 |
= nkп1 |
(q1з – q1) – nkс1 q1, |
|
|
|
M2 |
= nkп2 |
(5.40) |
(q2з – q2) – nkс2 q2 , |
||
|
|
|
где n – коэффициент передачи редукторов координат;
kп1 kс1, kп2, kс2 – коэффициенты, определяемые из выра-
жений (5.35);
q1з, q2з – заданные перемещения координат q1, q2. Уравнения (5.39) с учетом (5.40) и инерционности яко-
рей двигателей приобретают вид:
J1с q1+ J3 cos (q2 – q1)q2 – J3 sin (q2 – q1)q22 +
+ n k с1 q1 |
+ J3 g cos q1 / l2 + nkп1 q 1 = nkп1q1з , |
|||
|
|
|
(5.41) |
|
J2с q2 + J3 cos (q2 – q1)q1+ J3 |
sin (q2 – q1)q |
|||
1 + |
||||
|
|
|
2 |
|
+ n k с2 q2 |
+ J20 g cos q2 / l2 + nkп2 q2 = nkп2q2з , |
|||
|
|
|
|
|
131
где J1с , J2с – суммарные моменты инерции, приведенные к выходным валам редукторов первой и второй координат.
Уравнения (5.41) движения исполнительной системы характеризуются взаимовлиянием координат по ускорению, скорости и перемещению. Выражая из второго уравнения
ускорение q2 и подставляя его в первое уравнение, а затем
наоборот, исключим из уравнений взаимовлияние по ускорению
|
2 |
|
|
|
|
|
q1 |
= (Bq1 / 2 – J2с n k с1 q1–J2 с nk п1 q1 –J2с J3 g cos q1 / l2 + |
|
||||
|
|
2 |
|
|
+ Д kп2 q2 + |
|
|
+ J2с nkп1 q1з +J2с Еq2 |
+ Д k с2 q2 |
|
|||
|
+ Д J20 g cos q2 / l2 n – Д kп2q2з ) / Г, |
(5.42) |
||||
|
|
|
|
|
|
|
|
2 |
|
J1с nkп2q2 – J1с J20 g cos q2 / l2 + |
|||
q2 |
= (–В q2 |
/ 2 – J1с nkс2 q2 – |
||||
|
|
|
2 |
|
+ Д k п 1 q1+ |
|
|
+J1с nkп2 q2з – J1с Е q1 |
+ Д k с1 q1 |
|
|||
+ Д J3 g cos q1 / l2 n – Д k п 1 q1з ) / Г,
где В = J32 sin 2(q2 – q1); Е = J3 sin (q2 – q1);
Д = J3 cos (q2 – q1) n;
Г = J1с J2с – J32 cos2 (q2 – q1).
Кинематическая взаимосвязанность степеней подвижности манипуляторов определяет необходимость устранения существенного взаимного влияния подсистем отдельных координат друг на друга. Эта задача может быть решена путем совершенствования системы управления следящими электроприводами манипулятора за счет введения в существующую структуру адаптивного регулятора.
Уравнения эталонного движения для рассматриваемой исполнительной системы имеют следующий вид:
J1с q1m + nkс1 q1m + nkп1 q1m = nkп1q1з, |
|
|||
|
|
|
|
|
|
|
q2m = nkп2 |
q2з, |
(5.43) |
J2с q2m + nkс2 q2m + nkп2 |
|
|||
132
где q1m, q1m , q1m , q2m, q2m , q2m – ускорения, скорости и перемещения координат при эталонном движении.
Динамика эталонной модели определяется только настройками подчиненных контуров. Задачами адаптивного управления являются развязывание динамики подсистем отдельных координат реального манипулятора, т. е. компенсация их взаимного влияния, и согласование собственного (локального) движения подсистем с эталонным движением (5.43), возбуждаемым программным управлением.
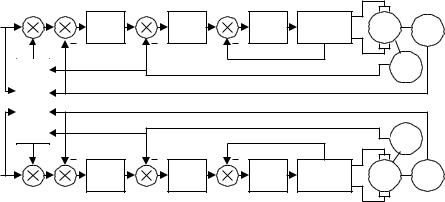
Структурная схема системы управления, обеспечивающей решение этих задач, приведена на рис. 5.5.
q1 |
З |
РП1 |
РС1 |
РТ1 |
ШИП1 |
М 1 ДП1 |
|
|
|||||
|
Uа1 |
q 1 |
|
|
|
|
|
|
|
|
ДС1 |
||
|
|
q 1 |
|
|
|
|
|
АР |
q 2 |
|
|
|
|
|
|
q |
|
|
|
ДС2 |
|
Uа2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
q |
|
РП2 |
РС2 |
РТ2 |
ШИП2 |
М 2 ДП2 |
2 З |
|
|
|
|
|
|
Рис. 2. СтруктурнаяРисхема. 5.5.самонастраивающейсяСтруктурная схема системы управления
самонастраивающейся системы управления
На схеме представлены трехконтурные исполнительные электроприводы двух координат робота и приняты следующие обозначения:
РП1, РП2 – регуляторы положения; РС1, РС2 – регуляторы скорости; РТ1, РТ2 – регуляторы тока;
ШИП1, ШИП2 – широтно-импульсные преобразователи; М1, М2 – двигатели; ДП1, ДП2 – датчики положения;
ДС1, ДС2 – датчики скорости.
133
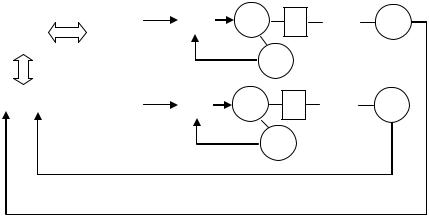
Адаптивный регулятор АР, используя информацию о заданных перемещениях q1з, q2з координат, а также о фактиче-
ских перемещениях q1, q2 и скоростях q1, q2 движения, фор-
мирует управляющие воздействия Uа1, Uа2 в соответствии с выражениями
Uа1 = Uал1 + Uар1, Uа2 = Uал2 + Uар2, (5.44)
гдествияU;ал1, Uал2 – локальные адаптивные управляющие воздей-
Uар1, Uар2 – развязывающие адаптивные управляющие воздействия.
Локальные адаптивные управляющие воздействия определяются параметрами движения и самонастраивающимися
коэффициентами ki1(t), ki2(t), |
ki3(t), |
ki4(t): |
|||
|
|
|
|
2 |
|
Uалi = ki1(t)qi+ki2(t) qi +ki3(t) qi +ki4(t)qiз , i = 1, 2. (5.45) |
|||||
|
Настройка параметров может осуществляться в соответ- |
||||
ствии с уравнениями: |
ki2 (t)= –Gi2di qi –Ai2ki2(t), |
||||
ki1(t)=–Gi1diqi –Ai1ki1(t), |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
(t)=–Gi4diqiз–Ai4ki4(t),(5.46) |
|
ki3 |
(t)=–Gi3di qi –Ai3ki3(t), ki4 |
||||
|
|
|
|
|
|
|
di= pi1(qi – qim)+pi2 |
(qi |
qim), |
i = 1, 2, |
|
|
|
|
|
|
|
где |
Gi1, Ai1, Gi2, Ai2, Gi3, |
Ai3, Gi4, |
Ai4, pi1, pi2 – положи- |
||
тельные коэффициенты усиления алгоритмов настройки. |
|||||
|
Коэффициенты Gi1, Gi2, |
Gi3, Gi4, pi1, pi2 определяют |
|||
степень приближения перемещений и скоростей координат манипулятора к эталонным, а коэффициенты Ai1, Ai2, Ai3, Ai4 – глубину стабилизирующей отрицательной обратной связи по самонастраивающимся параметрам ki1(t), ki2(t), ki3(t), ki4(t).
Развязывающие адаптивные воздействия равны
Uар1 = k16(t) q2 + k17(t)q2 + k18(t)q22 + k19(t)q1q2 + k110(t) q2з, Uар2 = k26(t) q1+ k27(t)q1+ k28(t)q12 + k29(t)q1q2 + k210(t) q1з ,(5.47)
134
при этом алгоритмы настройки параметров выражаются следующими уравнениями:
k16 (t)= –G16 d1 q2 – A16 k16 (t), k17 (t)= –G17 d1 q2 – A17 k17(t), k18 (t)= –G18 d1 q22 – A18 k18(t), k19 (t)= –G19 d1 q1q2 – A19 k19(t),
k110 (t)= –G110 d1 q2з – A110 k110(t),k26 (t)= –G26 d2 q1– A26 k26(t),(5.48)
|
|
|
|
28 |
(t)= –G28 d2 |
|
2 |
– A28 |
k28(t), |
k27 |
(t)= –G27 d2 q1– A27 k27(t), k |
q1 |
|||||||
k |
|
|
|
k |
|
|
|
|
|
29 |
(t)= –G29 d2 q1q2 – A29 k29(t), |
210(t)= –G210 d2 q1з – A210 k210(t), |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где G16, A16, G17, A17, G18, A18, G19, A19, G110, A110, G26, A26, G27,
A27, G28, A28, G29, A29, G210, A210 – положительные коэффициенты усиления алгоритмов настройки. Коэффициенты G16, G17,
G18, G19, G110, G26, G27, G28, G29, G210 определяют степень приближения перемещений и скоростей координат манипулятора
к эталонным, а коэффициенты A16, A17, A18, A19, A110, A26, A27, A28, A29, A210 – глубину стабилизирующей отрицательной об-
ратной связи по самонастраивающимся параметрам k16(t), k17(t), k18(t), k19(t), k110(t), k26(t), k27(t), k28(t), k29(t), k210(t).
Совокупность уравнений движения исполнительной системы, выражений для определения адаптивных управляющих воздействий и алгоритмов настройки параметров в уравнениях для расчета локальных и развязывающих воздействий представляет собой математическую модель робота с угловой системой координат, которая используется для моделирования на ЭВМ и исследования самонастраивающейся системы управления.
Реализация алгоритмов кинематического, динамического и адаптивного управления требует применения современных ЭВМ. Они обеспечивают необходимую гибкость благодаря простоте программирования и перепрограммирования и позволяют создавать сложные информационные и управляющие системы. Вопросам создания аппаратных и программных средств систем управления роботами посвящена следующая глава.
135
Контрольные вопросы
1.При каких условиях возникает необходимость в применении адаптивного подхода к управлению роботами?
2.Сформулируйте задачу адаптивного управления.
3.Какие существуют подходы к решению задачи адаптивного управления?
4.Запишите выражения и постройте структурную схему системы адаптивного управления с эталонной моделью, параметрической и сигнальной настройкой.
5.Получите структурную схему адаптивной системы с настраиваемой моделью.
6.Каким образом выбираются значения коэффициентов передачи и постоянных времени регуляторов тока, скорости и положения исполнительного электропривода?
7.Получите выражение для определения электромагнитного момента, развиваемого двигателем, в системе подчиненного регулирования.
8.Поясните смысл всех параметров, входящих в уравнения движения манипулятора с угловой системой координат, полученные на основе аппарата Лагранжа.
9.Запишите уравнения движения манипулятора с учетом динамики исполнительных электроприводов.
10.Получите уравнения движения исполнительной системы, в которых отсутствует взаимовлияние координат по ускорению.
11.Что представляет собой эталонная модель, и чем определяется ее настройка?
12.Опишите структурную схему самонастраивающейся системы управления двухкоординатного робота.
13.Какие задачи решаются с помощью локальных и развязывающих адаптивных управляющих воздействий?
14.Каким образом определяются самонастраивающиеся коэффициенты в уравнениях для локальных управлений?
15.В чем отличие между уравнениями для расчета локальных и развязывающих адаптивных воздействий?
136
6. МИКРОПРОЦЕССОРНАЯ РЕАЛИЗАЦИЯ АЛГОРИТМОВ УПРАВЛЕНИЯ
6.1. Варианты построения систем управления манипуляторами
На практике используются три способа аппаратной реализации алгоритмов управления промышленными роботами: аналоговый, микропроцессорный и гибридный. В большинстве существующих систем управления промышленных роботов и технологического оборудования на исполнительном уровне управления применены гибридный и аналоговый способы; при этом контуры тока и скорости реализовались на аналоговой технике, а контур положения – как на аналоговой, так и на микропроцессорной основе.
В том случае, если в роботах используются регулируемые электроприводы с аналоговым сигналом задания скорости, система управления строится в соответствии с функциональной схемой, показанной на рис. 6.1.
|
|
|
|
Uзс1 |
|
|
М1 |
|
|
|
|
|
|
|
|
|
|
|
|
УВМ |
|
|
ИП1 |
|
|
|
P1 |
|
|
ИМ1 |
ДП1 |
||||||
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МАВыв |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
. |
|
|
ДС1 |
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
. |
|
|
|
|
. |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
Uзсn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МСД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДПn |
|
|
|
|
ИПn |
|
Мn |
|
|
Pn |
|
|
ИМn |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. . . |
|
|
|
|
|
|
ДСn |
|
|
|
|
|
. . . |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
.
.
.
Рис. 6.1. Функциональная схема цифроаналоговой системы управления
137
На рис. 6.1 приняты следующие обозначения блоков: УВМ – управляющая вычислительная машина; МСД – модуль связи с датчиками; МАВыв – модуль аналогового вывода;
ИП1–ИПn – исполнительные приводы координат робота; М1–Мn – исполнительные двигатели робота; ДС1–ДСn – датчики скорости двигателей;
Р1–Рn – редукторы;
ИМ1–ИМn – исполнительные механизмы координат ро-
бота;
ДП1–ДПn – датчики перемещений координат.
УВМ через модуль связи с датчиками МСД получает информацию о положении координат и на основе сравнения заданных и фактических перемещений вырабатывает коды задающих воздействий.
МАВыв преобразует коды в аналоговые сигналы Uзс1–Uзсn, которые поступают на регуляторы скорости исполнительных электроприводов ИП1–ИПn. Электроприводы обеспечивают отработку заданных скоростей.
В зависимости от конкретных технических требований к проектируемому роботу его система управления может иметь один, два, три или четыре уровня управления. В интеллектуальных роботах присутствуют высший, стратегический, тактический и исполнительный уровни управления. В адаптивных роботах отсутствует высший уровень; в программноуправляемых роботах присутствуют только тактический и исполнительный уровни.
Реализация алгоритмов адаптивного и интеллектуального управления требует применения современных вычислительных машин. Конец второго и начало третьего тысячелетия ознаменовались стремительным развитием аппаратных и программных средств вычислительной техники. Они легко реализуют требуемые законы управления, быстро перепрограммируются и позволяют создавать сложные информационные и управляющие системы.
138
В современных промышленных роботах на исполни- |
|||||||
тельном уровне применяется непосредственное цифровое |
|||||||
управление, при этом могут использоваться один или несколь- |
|||||||
ко процессоров. Функциональная схема варианта многопроцес- |
|||||||
сорной системы управления промышленного робота, выпол- |
|||||||
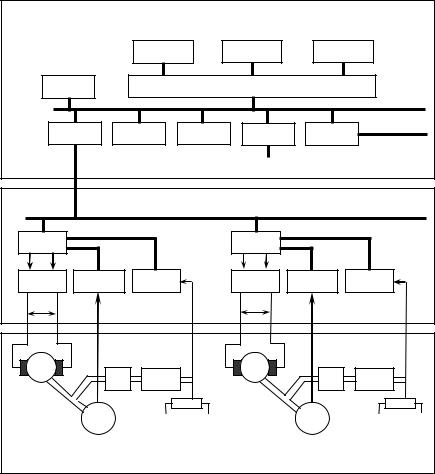
ненной по двухуровневой схеме, представлена на рис. 6.2. |
|||||||
|
Тактический уровень управления |
|
|
||||
|
|
НИ |
|
ВТУ |
ПРУ |
|
|
ЦП |
|
|
И |
|
|
МА1 |
|
|
|
|
|
|
|
|
|
|
МС |
ОЗУ |
ПЗУ |
МДВв |
МДВыв |
на М и ТО |
|
|
|
||||||
|
|
|
|
с М и ТО |
|
|
|
|
Исполнительный уровень управления |
МА2 |
|||||
|
|
|
|
|
|
|
|
МК1 |
|
|
. . . |
МКn |
|
|
|
ИУМ1 |
МСД1 |
МАВ1 |
. . . ИУМn |
МСДn |
МАВn |
||
U1 |
|
|
|
Un |
|
|
|
M1 |
Р1 ИМ1 |
R1 |
Mn |
Рn ИМn Rn |
|||
|
. . . |
||||||
|
ДП1 |
+Uп |
-Uп |
ДПn |
|
+Uп -Uп |
|
|
|
|
|||||
|
|
Объект управления |
|
|
|
||
Рис. 6.2. Функциональная схема многопроцессорной системы
139