

Методическое пособие 659
.pdfh2, h3 – длины плеч в механизмах преобразования вращательного движения в поступательное.
При бесконечно больших коэффициентах усиления в
контурах ускорения координат , l, r система взаимосвязанных уравнений (4.71) преобразуется в три независимых уравнения, которые совпадают с соответствующими уравнениями эталонной системы (4.73).
В соответствии с (4.54) постоянные времени T , Tal, Tar контуров ускорения определяются по формулам
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
Т |
|
|
R1А (r) |
|
|
|
, |
Та l |
|
|
|
|
|
|
R2 Аl |
|
|
|
, |
||||||||
n |
k |
m1 |
( |
|
+k |
e1 |
n ) |
n |
2 |
k |
m2 |
( |
h +k |
e2 |
n |
) |
|||||||||||
1 |
|
|
|
|
|
1 |
|
|
|
|
~ |
|
|
|
l |
2 |
2 |
(4.78) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Та r |
|
|
|
|
|
|
Аr |
|
|
|
|
|
. |
|
|
|
|
|
|||||
|
|
|
|
n |
3 |
k |
m3 |
( |
r |
h +k |
e3 |
n |
) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
3 |
|
|
|
|
|
|
|
||||||
Числовые значения коэффициентов усиления , l, r определим из уравнений
max T |
= (0,1 – 0,2)T , |
|
= , l, r. |
(4.79) |
,l,r |
|
|
|
|
Из выражений (4.78) и (4.79) получим формулы для расчета коэффициентов усиления контуров ускорения:
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
(5 10) |
R |
1А (rmax ) |
k |
n |
, |
|||||||
|
|
|
|
|||||||||||
|
|
|
|
n1km1Т |
|
|
|
|
e1 1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
~ |
|
|
|
ke2n2 |
|
|
|
||
l (5 10) |
|
R2Аl |
|
|
, |
(4.80) |
||||||||
n2km2h2Тl |
|
|
||||||||||||
|
|
|
|
|
|
h2 |
|
|||||||
|
|
|
|
|
~ |
|
|
|
|
ke3n3 |
|
|
||
r (5 10) |
|
|
R3Аr |
|
. |
|||||||||
n3km3h3Т r |
|
|||||||||||||
|
|
|
|
|
|
h3 |
|
|||||||
4.6.Позиционное управление манипулятором
всферической системе координат
Уравнения динамики рассматриваемого манипулятора получим на основе выражения (1.49) с учетом (4.12), (4.18):
100

|
|
А 1(r, 2) 1 B 1(r,r, 2, 1 |
, 2 ) |
|
|
|
|
|
|
|||||||||||||
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1[km1U1 |
|
R1 (km1ke1n1 /R1) 1], |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А 2(r) |
2 B |
2(r,r, 2 |
, 1 |
, 2 ) C 2(r, 2) |
|
|||||||||||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.81) |
|
|
n2[km2U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
R2 (km2ke 2n2 /R2) 2 |
], |
|
|
|||||||||||||||||
|
|
~ |
|
|
|
|
|
|
|
2 |
Cr ( 2)h |
2 |
|
|
|
|||||||
|
|
Аrr Br(r, 2, 1 |
, 2 )h3 |
3 |
|
|||||||||||||||||
|
|
n3h3[km3U3 |
R3 (km 3ke3n3 /R3)r], |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
~ |
|
|
|
|
|
|
|
|
|
|
2 |
~ |
|
|
|
|
|
|
|
|
2 |
|
|
А 1(r, 2) J1n |
|
|
|
|
|
|
|
; |
|||||||||||||
где А 1(r, 2) |
1 , |
А 2(r) |
А 2(r) J2n2 |
|||||||||||||||||||
~ |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Аr Аrh3 J3n3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Преобразуем выражение (4.81): |
, 1 |
, 2 ) |
|
|
|
|
|
|||||||||||||||
|
А 1(r, 2) 1 B 1(r,r, 2 |
|
|
|
|
|
||||||||||||||||
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
(km1ke1n1 |
/R1) 1 n1km1U1 R1 , |
|
|
|
|
|
||||||||||||||
2(r) |
2 B |
2(r,r, 2 |
, 1 |
, 2 ) C 2(r, 2) |
|
|||||||||||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.82) |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
(km2ke 2n2 |
|
/R2) 2 n2 km2U2 R2 , |
|
||||||||||||||||||
|
~ |
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
||||||
|
Аrr Br(r, 2, 1, 2 )h3 Cr ( 2)h3 |
|
||||||||||||||||||||
|
|
|
|
|
|
2 |
/R |
|
|
|
|
|
|
|
|
|
|
|
||||
|
(km 3ke3n3 |
3)r n3h3km3U3 R3 . |
|
|||||||||||||||||||
Введем следующие обозначения: |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
1(r,r, 2, 1, 2) B 1(r |
,r, 2, 1, 2) |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
(km1ke1n1 / R1) 1, |
2, 1, |
2), |
|
|||||||||||||
|
2(r,r, 2, 1 |
, 2) B 2(r,r, |
|
|||||||||||||||||||
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.83) |
||||||
|
|
|
|
|
C 2 (r, |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
2) (km2ke 2n2/ R |
2) 2, |
|
|
|
|
|
|||||||||||
|
|
Br(r,r, 2, 1, 2) Br(r, 2 |
, 1, |
2)h3, |
|
|||||||||||||||||
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||
Cr ( 2)h32 (km 3ke3n32/ R3)r.
Сучетом принятых обозначений (4.83) из выражений (4.82) получим систему уравнений:
101

А 1(r, 2) 1 B 1(r,r, 2, 1, 2 ) n1km1U1 R1 , |
|||||||||
~ |
|
|
~ |
|
|
|
|
|
|
А 2(r) |
2 B |
2(r,r, |
2 |
, 1 |
, |
2 ) n2 km2U2 R2 , (4.84) |
|||
~ |
|
~ |
|
|
|
|
|
|
|
Аrr Br(r,r, 2 |
, |
1, |
2 ) n3h3km3U3 R3 . |
||||||
~ |
|
|
|
|
|
|
|
|
|
Задачу управления сформулируем следующим образом. Синтезируемый алгоритм управления должен обеспечивать перевод механизма из произвольного начального состоя-
ния
1 |
(0), |
1(0), 2 |
(0), |
2(0),r(0),r(0) |
(4.85) |
|
|
|
|
|
|
в назначенное состояние, которое соответствует неподвижной точке зад1, зад2, rзад. Необходимо при этом, чтобы переход-
ные процессы 1(t) зад1, 2(t) зад2, r(t) rзад |
являлись |
|||
решениями дифференциальных уравнений: |
|
|
||
|
iэ(t) i1 i(t) i0 i (t) i0 задi , |
i 1, 2, |
|
|
|
|
|
|
(4.86) |
|
|
|
|
|
|
rэ(t) r1r(t) r0 r(t) r0 rзад, |
|
||
где iэ(t),rэ(t) – эталонные ускорения по координатам; |
||||
|
|
|
|
|
i1, i0, r1, r0 |
– параметры алгоритма управления, кото- |
|||
рые определяются из уравнения (4.24).
Решение поставленной задачи обеспечивается с помощью алгоритмов управления по ускорению
|
Ui i ( i i ), |
i 1, 2, |
|
|
||
|
|
|
|
|
(4.87) |
|
|
|
|
|
|||
U3 r (ar r), |
|
i , r const 0. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Требуемые ускорения вычисляются из (4.86) по форму- |
||||||
лам |
|
|
|
i1 i, |
|
|
i iэ i0 ( задi i) |
i 1, 2, |
|
||||
|
|
|
|
|
|
(4.88) |
|
|
|
|
|
|
|
|
ar rэ(t) r0 |
(rзад r) r1r. |
|
|
||
102
Уравнения (4.87) можно записать в интегральной форме
t |
|
|
U3 |
t |
|
(4.89) |
|
Ui (t) i idt i , |
(t) r ardt r |
. |
|||||
0 |
|
|
|
0 |
|
|
|
Система взаимосвязанных уравнений (4.84), (4.87), (4.89), описывающих процессы в замкнутых контурах управления, при неограниченном возрастании коэффициентов усиленияi , r распадается на три независимых уравнения второго
порядка. Каждое из них совпадает с соответствующим уравнением из (4.86). Из этого следует практический вывод о том, что требуемая степень приближения к эталонным процессам может быть достигнута при конечных значениях коэффициентов усиления контуров ускорения.
Постоянные времени контуров ускорения для рассматриваемого манипулятора вычисляются по формулам
|
|
~ |
|
|
~ |
|
|
T |
|
Ri A i (r, 2) |
, T |
|
R3Ar |
. (4.90) |
|
nikmi ( i keini ) |
n3km3( rh3 ke3n3) |
||||||
i |
|
ar |
|
|
Числовые значения коэффициентов усиления i, r определяются из уравнений
maxT i (0,1 0,2)Т i, |
i 1, 2, |
Tar (0,1 0,2)Тr. (4.91) |
1, 2 |
|
|
Из выражений (4.90) и (4.91) следуют расчетные формулы для определения коэффициентов усиления контуров ускорения:
|
~ |
|
|
|
|
|
|
|
i (5 10) |
|
Rimax A i(r, 2) |
keini, |
i 1, 2, |
||||
|
|
|||||||
|
|
nikmiТ i |
|
|
|
(4.92) |
||
|
|
|
~ |
|
|
|
|
|
r |
(5 10) |
R3Ar |
|
ke3n3 |
. |
|
||
n3km3h3Тr |
|
|
||||||
|
|
|
|
h3 |
|
|||
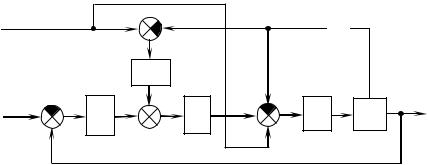
Структурная схема системы, соответствующая уравнениям (4.88) и (4.89), приведена на рис. 4.8.
103

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
γ11 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
зад1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
γ10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
||||||||
зад2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U2 |
ИМ |
|
|
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
rзад |
|
|
|
|
|
|
ar |
|
|
|
|
|
|
|
|
|
U3 |
|
|
|
|
|
|
r |
||||||||||
γro |
|
|
|
|
|
|
|
|
αr |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
r |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
γr1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.8. Структурная схема системы управления трехкоординатным манипулятором, работающим
всферической системе координат
4.7.Особенности контурного управления манипуляторами
Внастоящем разделе синтезируются алгоритмы управления манипуляторами по программным траекториям, заданным в виде законов изменения кинематических переменных.
Математическую модель управляемого движения принимаем в виде системы уравнений (4.09).
Рассмотрим содержательную постановку задачи контурного управления. Пусть назначенная траектория qзад(t) задана
ввиде законов изменения обобщенных координат qзадj(t) и их
первых производных qзад j (t), причем обобщенные координа-
ты интерполированы кубическими сплайнами на последовательности временных интервалов [ts–1, ts].
В начальный момент времени t = 0 состояние управляемого механизма характеризуется определенными значениями обобщенных координат и их производных:
qj (0) qj0, |
qj (0) |
qj0, |
j 1, 2,...,n. (4.93) |
|
|
|
|
|
104 |
|
|

Требуется синтезировать алгоритмы формирования управляющих функций, Uj Uj (q,q,t), при которых точка q
из начального положения перемещается за конечное время в окрестность траектории q зад (t) и остается в этой окрестности
при последующем движении. При этом отклонения j(t)= = qзадj(t) – qj(t) обобщенных координат от заданных значений должны являться решениями дифференциальных уравне-
ний [5]:
j hj1 |
j hj0 j 0, |
j 1, 2,...,n. |
(4.94) |
|
|
|
|
На основании (4.94) заключаем, что вторые производные qj (t) от обобщенных координат определяются из выражения
qj (t) q |
зад j hj1 |
(qзад j qj ) hj0 (qзад j qj). (4.95) |
||
|
|
|
|
|
Для определения параметров исходим из того, что для каждой степени подвижности назначены длительности tj про-
цессов j(t) 0 и перерегулирование j = 4,3 %. В таком случае коэффициенты hj0, hj1 рассчитываются по формулам [5]
hj0 1/Т2j |
; |
hj1 2 j Т j , |
Тj tj 3. |
(4.96) |
|
Обозначим через Мдjэ моменты двигателей, при которых |
|||||
реализуются уравнения: |
|
|
|
|
|
jэ = qзад j |
hj1 |
(qзад j qj ) hj0 (qзад j qj), |
(4.97) |
||
|
|
|
|
|
|
jэ = |
|
~ |
j = 1, 2, ..., n. |
|
|
qзад j + jэ, |
|
||||
|
|
|
|
|
|
В соответствии с общей схемой процедуры синтеза алгоритмов управления по ускорению управляющие момент
Мдjэ и напряжение Ujэ можно определить из выражений (4.24) |
||
и (4.28). С учетом выражений (4.7) для ejj, cjj |
получаем сле- |
|
дующую систему уравнений: |
|
(4.98) |
М дjэ(t) = kj( jэ – qj ), kj = const, |
||
|
|
|
|
|
|
Ujэ= (Rj/kmj)[Тjэ kj( jэ – qj ) + Мдjэ] + kejnj qj. |
||
|
|
|
105

Требуемые значения момента Мдjэ и управляющего напряжения Ujэ вычисляются по информации, характеризующей состояние управляемого процесса по j-ой степени по-
движности (qj, qj, qj ).
Алгоритмы (4.97), (4.98) можно представить в интегральной форме.
Процессы изменения момента Мдj(t) протекают также как эталонные Мдjэ(t), когда скорости изменения моментов в приводах будут равны
М дj = j(Мдjэ – |
Мдj), j = 1, 2, ..., n. |
(4.99) |
Исходя из (4.98) и (4.99) формула для расчета управля- |
||
ющих напряжений имеет вид |
|
|
Uj = (Rj/kmj)[Тjэ j(Мдjэ |
– Мдj) + Мдj] + kejnj qj. |
(4.100) |
|
|
|
Подставляя в первое уравнение системы (4.98) выражение для jэ из (4.97), после интегрирования получим формулу
t |
~ |
jэ dt –q j (t)], kj = const. (4.101) |
Мдjэ(t) = kj[qзад j (t)+ |
||
|
|
|
0 |
|
|
Структурная схема канала управления для одной координаты, составленная на основе выражений (4.97), (4.100) и (4.101), приведена на рис. 4.9.
qзад j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qj |
|
|
|
|
|
hj1 |
|
|
|
Тjэ j |
kejnj |
|
|
qзад j |
hj0 |
~jэ |
|
kj |
Мдjэ |
Rj |
Uj |
ИМ |
qj |
|
|
|
kmj |
|
|
||||
qj |
|
|
|
|
|
Мдj |
|
||
|
|
|
|
|
|
|
|||
Рис. 4.9. Структурная схема канала контурной системы управления с учетом электрической постоянной времени
106
Коэффициенты усиления kj принимают равными [5]: |
|||
~ |
|
|
|
kj (5 10) |
max Aj j (q) |
, |
(4.102) |
|
|||
|
njТj |
|
|
~
где Aj j (q) – диагональный элемент матрицы A(q), входящей
впервое уравнение системы (4.9).
Втом случае, когда не учитывают инерционность в электрических цепях двигателей, управляющее напряжение находят из формулы
t |
~ |
jэ dt –q j (t)], jj = const. (4.103) |
Uj (t) = jj[qзад j (t)+ |
||
|
|
|
0 |
|
|
На основе уравнений (4.97) и (4.103) составлена структурная схема одного канала системы контурного управления, приведенная на рис. 4.10.
|
|
|
|
|
|
qзад j |
|
|
|
qj |
|
|
hj1 |
|
|
|
|
qзад j |
~ |
|
jj |
Uj |
qj |
hj0 |
j |
|
ИМ |
Рис. 4.10. Структурная схема канала контурной системы управления без учета электрической постоянной времени
Расчет коэффициентов jj для угловых координат выполняется по формуле (4.56). Для линейных координат jj определяется в соответствии с выражением
|
|
~ |
|
|
|
j j (5 |
10) |
Rj max Aj j (q) |
nj ke j . |
(4.104) |
|
Т j nj km j hj |
|||||
|
|
hj |
|
107
Для практической реализации рассмотренных алгоритмов контурного и позиционного управления в вычислитель системы исполнительного уровня в общем случае необходимо
вводить задающие воздействия qзадj(t), qзад j (t) и qзад j (t), опре-
деляющие требуемые законы изменения обобщенных координат, скоростей и ускорений во времени. Эти задающие воздействия формируются на тактическом уровне управления.
4.8. Управление манипулятором в базовой системе координат
Рассмотренные ранее задачи синтеза алгоритмов управления по ускорению формулировались как задачи управления кинематическими переменными. В технических приложениях возникает необходимость управления координатами xs в базовой системе отсчета Ох1х2х3. Координаты хs могут определять, например, пространственное положение контролируемой точки рабочего инструмента. В этом разделе изложена методика определения структуры алгоритмов управления и расчета их параметров.
Будем рассматривать исполнительный механизм с тремя степенями подвижности. Кинематическое уравнение механизма запишем в векторной форме
X(t) = F [q(t)], X = [x1, x2, x3]т, q = [q1, q2, q3]т, (4.105)
где x1, x2, x3 – координаты пространственного положения контролируемой точки в базовой системе отсчета;
q1, q2, q3 – кинематические переменные (обобщенные координаты), характеризующие взаимное положение звеньев исполнительного механизма.
Задачу синтеза управления в базовой системе координат сформулируем следующим образом.
В начальный момент времени t = 0 состояние звеньев исполнительного механизма характеризуется некоторыми зна-
чениями координат и скоростей их изменения |
(4.106) |
||
xs(0) = xs0, |
xs (0) = |
xs0 , s = 1, 2, 3. |
|
|
|
|
|
108
Требуется определить структуру и параметры алгоритма вычисления управляющих напряжений us из условия, чтобы исполнительный механизм перешел в окрестность неподвижной
точки Xзад = (xзад1, xзад2, xзад3)т. Необходимо при этом, чтобы переходные процессы xs(t) xзадs (t) с требуемой степенью точности следили за решениями дифференциальных уравнений
хsэ(t) |
+ Ks1 хsэ(t) + Ks0xsэ(t) |
= Ks0xзадs. |
(4.107) |
|
|
|
|
Требуемые ускорения ajэ вычисляются согласно выра- |
|||
жению |
|
хsэ(t). |
(4.108) |
ajэ= Ks0(xзадs – xsэ(t)) – Ks1 |
|||
|
|
|
|
Момент Мдs(t) по координате s определяется движением по всем трем координатам:
3 |
|
Csj = const, j = 1, 2, 3. (4.109) |
|
М дs(t) = Сs j (ajэ – хj (t)), |
|||
|
|
|
|
|
|
|
|
j 1 |
|
|
|
Этим уравнениям соответствует интегральная форма |
|||
3 |
t |
– хj (t)], j = 1, 2, 3. |
(4.110) |
Мдs(t) = |
Сs j [ аjэdt |
||
|
|
|
|
j 1 |
0 |
|
|
Согласно (4.5) справедливо выражение |
|
||
Тэs Mдs + Мдs = Uskms/Rs – kmskesns qs/Rs. |
(4.111) |
||
|
|
|
|
|
|
|
|
Из выражений (4.109) и (4.111) следует уравнение для определения управляющего напряжения по координате s
3 |
|
Us = (Rs / kms)[Тэs Сs j (ajэ – хj(t)) + |
|
|
|
j 1 |
(4.112) |
+ Мдs + kms kes ns qs / Rs]. |
|
|
|
Для упрощенной модели управляемого |
движения |
(Tэs = 0) управляющие напряжения Us определяются интегрированием выражений
|
3 |
~ ~ |
|
~ |
(4.113) |
Us (t) = Сs j ( а jэ– хj (t)), |
С sj = const. |
||||
|
|
|
|
|
|
j 1
109