

2598
.pdf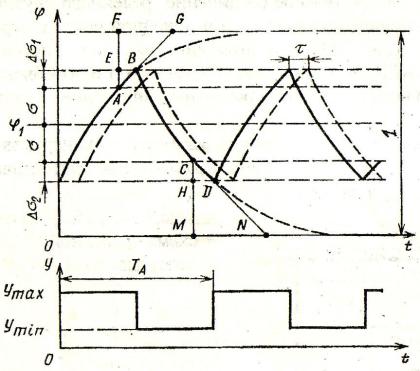
Рис. 6.48. Определение параметров автоколебаний в релейной двухпозиционной АСР с запаздыванием
Регулятор получает информацию об изменении регулируемой величины с запаздыванием , и размах автоколебаний равен уже не 2σ (в относительных единицах), а больше (рис. 6.48). Приращения Δσ1 и Δσ2 возникают благодаря тому, что вследствие инерционности объекта переключения регулирующего воздействия происходят на время позже.
Штриховая кривая на рис. 6.48 соответствует изменению
2 t 2 t .
Для определения параметров автоколебаний проведем секущие через точки A, B и С, D до пересечения с линиями установившихся значений2 1 и 2 0. В результате геометрических построений образуется две
пары подобных треугольников: AGF ~ ABE |
и CNM ~ CDH . Следова- |
||||
тельно, |
AE / BE AF / FG |
и |
CH / HD CM / MN, |
откуда |
|
AE BE AF / FG и CH HD CM / MN . |
|
|
|||
Учитывая, что AE 1; |
BE ; |
AF 1 1 |
; FD T /2; |
CH 2; |
|
|
HD ; CM 1 ; MN T / 2, получим |
|
|||
617
623
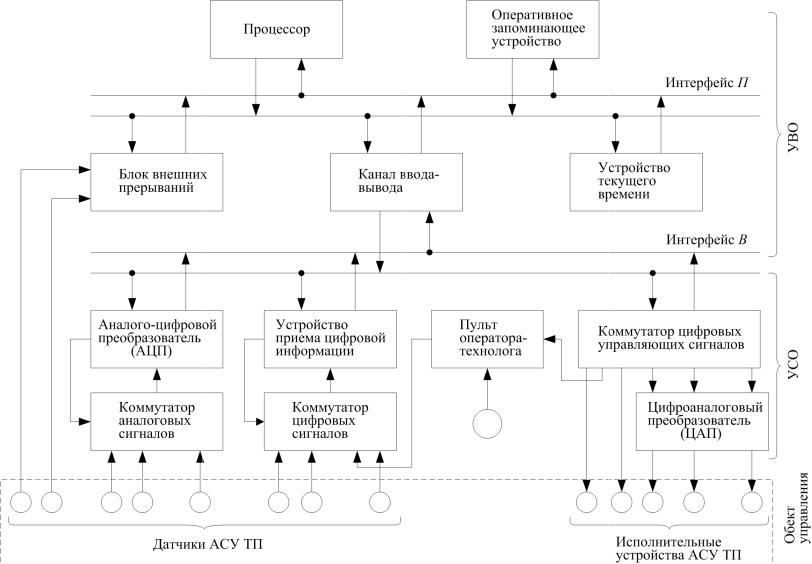
Рис. 6.49. Структура комплекса технических средств АСУ ТП
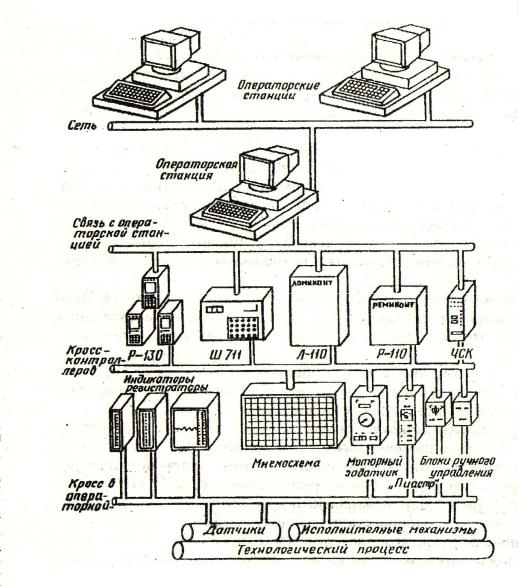
Рис. 6.50. Состав технической части НТК «Комплекс»
Для технической реализации АСУ ТП выпускается ряд малогабаритных локальных микропроцессорных регуляторов температуры типов «Протерм 100», «Минитерм 300» ИРТ-2 и др., обладающих повышенной надежностью и режимами позиционного и ПИД-регулирования, а также мощные программно-технические комплексы (ПТК) «Квинт», «Комплекс» (рис. 6.46), «Техноконт», «Униконт», «Миксис» и др. Основу функционирования, например, ПТК «Комплекс» составляют электронные устройства: датчики, контроллеры регулирующие Р-130, Р-110, логические Л-110, Ш-711, 4 СК, средства передачи данных, ПЭВМ в роли операторской станции и др.
624