тичного логарифма концентрации водородных ионов, который называется водородным показателем рН.
Для нейтральной среды
рН=-lq[10-7]=7. (6.15)
Распространены два основных метода измерения рН: кондуктометрический и гальванометрический. Кондуктометрический метод основанна определении электропроводности раствора сильных кислот и щелочей со значительным содержанием солей. Гальванометрический (потенциометрический) метод является основным для технических измерений и использует два электрода, один из которых измерительный, потенциал которого меняется в зависимости от концентрации ионов в контролируемом растворе, а другой - сравнительный, потенциал которого от свойств контролируемого раствора не зависит.
Упрощенная схема автоматического рН-метра (например, преобразователя рН-261) со вторичным прибором (автоматическим электронным потенциометром) показана на рис. 6.14. Измеряемая ЭДС электродной пары практически полностью уравновешивается выходным напряжением усилителя преобразователя Пр. Такой метод уравновешивания называется методом статической компенсации, т.к. при его использовании отпадает необходимость в применении подвижных элементов (реверсивного двигателя и реохорда). Сила тока в цепи выходного усилителя преобразователя (Пр), пропорциональная величине рН контролируемого раствора, показывается на приборе преобразователя, шкала которого градуирована в единицах рН. Показания преобразователя могут передаваться на вторичный прибор, который не только показывает, регистрирует значение рН, но и может регулировать.
6.4. Автоматические системы регулирования технологических параметров
Цель автоматического регулирования, являющегося частным случаем автоматического управления, состоит в обеспечении заданного алгоритма функционирования - закона изменения некоторого технологического параметра (регулируемой величины). В частном случае регулируемую величину требуется поддерживать на заданном постоянном уровне. Например, для обеспечения нормальной работы оборудования для влажнотепловой обработки строительных изделий необходимо поддерживать соответствующую температуру для поддержания соответствующей вязкости (подвижности) смесей, например бетонных, и регулировать влажность заполнителей смеси, изделий и конструкций из бетона.
Задача автоматического регулирования здесь сводится к поддерживанию равенства
где x1(t) - требующееся изменение регулируемой величины во времени (заданное изменение); х2(t) - действительное изменение регулируемой величины во времени.
В промышленных системах на объект регулирования непрерывно действуют разного рода возмущающие воздействия, благодаря которым регулируемая величина отклоняется от заданного закона изменения. Такими возмущающими воздействиями для влажно-тепловой обработки бетонных изделий могут быть загрузка увлажненного изделия, изменение давления пара, изменение температуры воздуха в цехе и др.
Для ликвидации нежелательных последствий возмущающих воздействий необходимо с помощью ИМ и РО вручную или автоматически осуществлять регулирующее воздействие на объект для обеспечения равенства
(6.14).
6.4.1. Классификация автоматических систем регулирования технологических параметров
Классификация АСР производится по довольно большому количеству признаков, рассмотрим ее в классическом варианте.
1.По принципу регулирования различают два типа регуляторов:
АСР по отклонению характеризуется тем, что регулирующее воздействие на объект регулирования формируется в зависимости от отклонения текущего значения регулируемой величины от заданного. На этом принципе были разработаны первые промышленные регуляторы уровня воды И.И. Ползуновым (1765г.) и скорости Дж. Уаттом (1784г.).
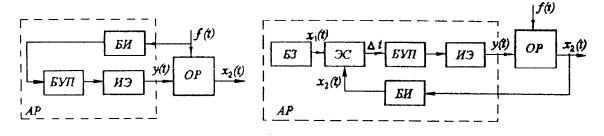
АСР по возмущению (принцип компенсации). Характеризуется тем, что, измеряя возмущающее воздействие на объект регулирования и формируя соответствующее регулирующее воздействие на объект, можно обеспечить независимость работы системы от этих возмущающих воздействий. Такие АСР, инвариантные (независимые) от возмущающих воздействий (рис. 6.15), отличаются быстротой реакции и хорошими характеристиками по устойчивости и качеству регулирования. Однако сложность измерения всех возмущающих воздействий создает трудности реализации подобных систем, поэтому они не получили широкого распространения.
Как видно из рис. 6.16, здесь измеряется отклонение регулируемой величины от заданного закона изменения - ошибка ∆ (t). Если ∆ (t) ≠ 0, автоматический регулятор создает регулирующее воздействие у(t) на объект регулирования, ликвидирующее или уменьшающее ошибку до допустимой величины. Системы, работающие по ошибке (отклонению), образуют
замкнутый контур и поэтому называются замкнутыми системами. Благодаря наличию связи между выходом объекта и входом автоматического регулятора образуется так называемая обратная связь. А так как на элементе сравнения при определении ошибки происходит вычитание х2(t) из х1(t), то обратная связь называется отрицательной. Поэтому АСР, работающие по ошибке, представляют собой системы с отрицательной обратной связью, которая служит для измерения результата действия системы.
Рис. 6.15. Функциональная схема АСР по возмущению: ОР - объект регулирования; БИ - блок измерения; БУП - блок управления; ИЭ - исполнительный элемент; f(t) -
возмущающее воздействие
Рис. 6.16. Функциональная схема АСР по отклонению: ОР - объект регулирования; БИ - блок измерения; БЗ - блок задания; ЭС - элемент сравнения; БУП - блок управления; ИЭ - исполнительный элемент; АР - автоматический регулятор
Принцип обратной связи широко используется в технике, не только в АСР, т.е. обратные связи присутствуют в измерительных и вычислительных устройствах, усилителях и т.д. Взаимодействие человека с различными техническими устройствами часто также происходит при наличии обратных связей, т.к. человек постоянно контролирует результат своего вмешательства в работу того или иного устройства, машины, агрегата и т.п. Таким образом, принцип обратной связи является одним из основных принципов управления и регулирования, а АСР, работающие по ошибке, наиболее распространены в различных отраслях промышленности.
Однако АСР по отклонению имеют и определенный недостаток: чтобы ликвидировать отклонение регулируемой величины от заданного значения, необходимо наличие этого отклонения, тогда как в АСР по возмущению ликвидируется сама причина возникновения ошибки. Объединением обоих принципов регулирования в одной АСР создается комбинированная АСР, лишенная недостатков каждой из систем в отдельности. Наличие в ней разомкнутого контура обеспечивает независимость регулируемой величины от одного из наиболее значительного по своему влиянию возмущения. А наличие замкнутого контура (обратной связи) ликвидирует влияние всех других возмущающих воздействий и неточностей компенсации.
2.По характеру изменения заданного значения регулируемой величины хЗД(t) = x1 (t) АСР подразделяются на:
-системы стабилизации, предназначенные для поддержания заданного значения регулируемой величины объекта, хЗД(t) = const;
-системы программного регулирования, в которых регулируемая величина объекта изменяется по заданной программе, хЗД(t) = f(t);
-следящие системы регулирования, в которых характер изменения выходной величины зависит от произвольного изменения какой-либо входной величины объекта, хЗД(t)≠ f(t) , т.е. х2(t) следит за изменением некоторой x1 (t).
3.АСР в зависимости от свойств системы в установившемся режиме разделяют на статические и астатические.
Статические системы характеризуются наличием остаточного откло-
нения регулируемой величины в установившемся состоянии равновесия, а величина отклонения при этом зависит от величины возмущающего воздействия на объект.
Астатические системы характеризуются отсутствием остаточных отклонений в установившемся состоянии равновесия.
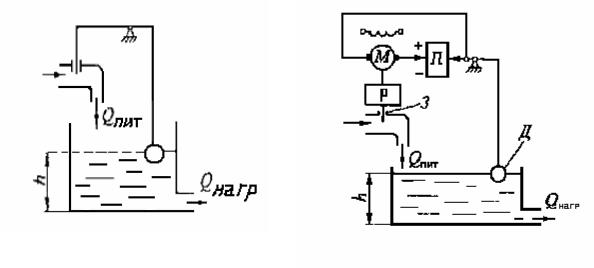
Рис. 6.17. АСР уровня жидкости статическая (а) и астатическая (б)
Для статической АСР (рис. 6.17, а) характерно то, что в установившемся состоянии количество расходуемой жидкости QНАГР (нагрузка) всегда равно количеству поступающей через регулирующий орган жидкости QПИТ. Следовательно, при изменении QНАГР будет устанавливаться новое состояние равновесия со значением уровня h, которому будут соответствовать новое положение регулируемого органа (РО) и новое количество поступающей жидкости. Таким образом, новое значение регулируемой величины hУСТ в установившемся состоянии будет несколько отличаться от
hЗАД , т.к. новому положению РО соответствует новое положение чувствительного элемента (поплавка), соответствующее h.
Для астатической АСР уровня (рис. 6.17, б) характерно то, что при отклонении уровня от состояния равновесия появляется разбаланс потенциометра П, сигнал с которого подается на двигатель М. Последний через редуктор Р перемещает РО (заслонку) 3, изменяя количество подливаемой жидкости Qпит. Уровень жидкости восстанавливается до исходного (заданного) значения, при котором восстанавливается баланс потенциометра и двигатель М останавливается.
4.По способу передачи сигналов между элементами автоматической системы АСР подразделяются на системы непрерывного и дискретного действия.
Непрерывные АСР характеризуются тем, что входная и выходная величины ее являются непрерывными функциями времени.
Дискретные (прерывистые) АСР характеризуются тем, что содержат хотя бы один элемент, в котором при непрерывном изменении входного сигнала выходной сигнал изменяется дискретно.
5.Автоматические системы бывают линейными и нелинейными. Линейные системы описываются линейными уравнениями. Нелинейные системы описываются нелинейными уравнениями и
более сложны при анализе их.
6.4.2. Объекты регулирования и их свойства
Обоснованный выбор и расчет регулятора в первую очередь определяются достоверностью математической модели объекта регулирования (ОР) (машина, аппарат, технологический процесс), к которому подключается автоматический регулятор, обеспечивающий поддержание или изменения по заданным условиям какого-либо параметра объекта.
Технологический процесс, как правило, характеризуется несколькими регулируемыми величинами. Например, в тепловом объекте регулирования выходными величинами (наряду с температурой) могут быть уровень, давление, химический состав среды и др. Таким образом, промышленные установки представляют собой сложные объекты с несколькими регулируемыми величинами. Однако такие объекты можно расчленить (декомпозировать) на ряд простых объектов, характеризуемых одной регулируемой величиной. В простейшем виде объект регулирования можно представить в виде некоторого объема или емкости, в которые непрерывно поступают и из которого одновременно отбираются вещество или энергия.
Установившийся режим в объекте, характеризуемый неизменным значением регулируемой величины, наступает при равенстве количества поступающего и расходуемого вещества или энергии. При изменении на-
грузки или появлении других возмущающих воздействий (например, изменение параметров объекта, изменение окружающей среды и др.), включая изменения по каналу регулирующего воздействия (например, напряжение питающего тока, температура и давление технологического пара и т.д.), возникают нарушения установившегося состояния. Восстановление равновесия достигается путем изменения регулирующего воздействия на объект.
Самовыравнивание - свойство объекта самостоятельно восстанавливать нарушенное состояние равновесия за счет изменения регулируемой величины. Объекты с самовыравниванием - статические объекты, а без самовыравнивания - астатические.
Статические объекты характеризуются коэффициентом самовыравни-
вания или обратным ему коэффициентом передачи объекта, а
астатические объекты - скоростью разгона.
Емкостью объекта называется свойство объекта регулирования накапливать энергию или вещество. Объекты бывают одноемкостные и многоемкостные. Одноемкостные объекты характеризуются одной постоянной времени.
Запаздывание (время запаздывания) характеризуется временем между моментом нанесения возмущающего воздействия (в частности, изменением входной величины) и началом изменения регулируемой (выходной) величины. При этом различают: переходное или емкостное запаздывание и транспортное или чистое запаздывание.
Транспортное (чистое) запаздывание характеризуется временем передачи воздействия от момента нанесения его до места его реализации (вход в объект). Например, при передаче вещества по транспортеру или трубопроводу это есть время, в течение которого отсутствует отклонение регулируемой величины после нанесения воздействия на транспортер или трубопровод.
Свойства объектов регулирования определяются из их математических моделей, которые получаются аналитическим или экспериментальным способами. Аналитический способ построения математической модели объекта осуществляется на основе физико-механических закономерностей, определяющих характер процессов в объекте, сопряжен с большими трудностями, а уравнения математической модели получаются достаточно сложными. Поэтому часто снимают экспериментальные динамические характеристики объекта (кривые разгона, импульсные характеристики, частотные характеристики) и по ним определяют параметры объекта регулирования, используемые в дальнейшем для выбора - закона регулирования и расчета оптимальных параметров настройки регулятора. При экспериментальном определении динамических характеристик обычно используются не абсолютные значения текущих величин, а их отклонения от
номинального, установившегося или начального значений. Поэтому в получающихся дифференциальных уравнениях, передаточных функциях используются приращения ∆х, ∆у, ∆ и т.д. Но с целью упрощения написания уравнений знак ∆ опускается и уравнение записывается с применением обозначений самих величин х, у, и т.д., подразумевая на самом деле под этими обозначениями их отклонения.
6.4.3. Автоматические регуляторы и законы регулирования
Классификация линейных регуляторов
По функциональному назначению и конструктивному исполнению регуляторы можно классифицировать следующим образом:
1.По виду регулируемой величины: регуляторы температуры, давления, уровня, влажности и т.д.
2.Регуляторы прямого и непрямого действия: в регуляторах прямого действия измерительное устройство без дополнительного источника энергии непосредственно воздействует на регулируемый орган, через который проходит в объект вещество или энергия; в регуляторах непрямого действия имеется блок усиления и преобразования, который питается от дополнительного источника энергии и усиливает мощность выходного сигнала до величины, способной управлять мощными реагирующими органами с большими потоками вещества или энергии.
3.В зависимости от рода вспомогательной энергии различают регуляторы электрические, пневматические, гидравлические и комбинированные (например, электропневматические и др.).
В большинстве случаев предпочтение отдается электрическим регуляторам благодаря компактности, малой массе, небольшим габаритам, возможности управлять на больших расстояниях, широким возможностям усиления и преобразования сигналов.
В тех случаях, когда требуются большие усилия и моменты для привода рабочих органов и необходимо соблюдать условия взрыво-пожаробе- зопасности, применяют гидравлические или пневматические регуляторы, обладающие высокой надежностью в работе и которые сравнительно просты в обслуживании. Однако потребность в больших сетях трубопроводов, необходимость иметь насосные и компрессорные станции значительно усложняет автоматическую систему при использовании таких регуляторов.
Распространенными являются комбинированные регуляторы, в которых измерительная часть - электрическая, а исполнительный элемент - гидравлический или пневматический.
4. По виду функциональной зависимости между регулирующим воздействием у(t) и отклонением регулируемой величины от заданного значе-
ния ∆(t)
у(t)=f[∆(t)] (6.17)
различают регуляторы, работающие по определенным типовым законам. Уравнения, определяющие закон регулирования, могут быть линей-
ными и нелинейными. Часто на практике уравнения регуляторов упрощают, пренебрегая нелинейностями, когда это возможно.
Для АСР, действующих по отклонению регулируемой величины от заданного значения, закон регулирования в общем виде записывается
|
у(t)=F[∆ (t)]. |
|
|
|
|
(6.18) |
|
|
Правая |
часть |
выражения |
|
|
(6.18) |
может |
содержать |
не |
|
|
только ошибку ∆, но и ее |
|
|
производные, и интегралы. |
|
|
|
Производные |
и интегралы |
|
|
вводятся в закон регулирования |
|
|
для улучшения свойств АСР - |
|
|
повышение устойчивости, точ- |
|
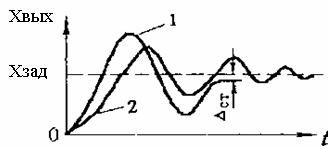
Рис. 6.18. Характер изменения регулируемой |
ности и качества процесса регу- |
|
лирования. |
Рассмотрим |
выра- |
|
величины Хвых в П-регуляторах (кривая 1) |
|
и в И-регуляторах (кривая 2) |
жение |
(6.18) |
применительно |
к |
|
лирования. |
типовым |
законам |
регу- |
|
|
|
|
|
|
|
|
Пропорциональный закон регулирования (П-регулятор) -
простейший регулятор, в котором регулирующее воздействие у(t) зависит только от ошибки ∆ (t):
у(t)=КР·∆t или у = КР·∆, |
(6.19) |
где КР называется коэффициентом усиления регулятора.
В промышленных регуляторах предусмотрена возможность изменения КР, поэтому он является параметром настройки регулятора. Изменяя КР, мы изменяем величину регулирующего воздействия, соответствующую одной и той же ошибке А (I).
Достоинство регулятора - его простота. Недостатки - регулятор не может полностью ликвидировать ошибку.
Интегральный закон регулирования (И-регулягор). Статическую ошибку можно исключить, если использовать интегральный закон регулирования
Коэффициент КИ = 1 / ТИ, где ТИ - параметр настройки регулятора, называемый постоянной времени интегрирования. Недостаток регулятора: динамические свойства хуже, чем у П-регулятора, т.е. процесс регулирования отстает от процесса появления и изменения отклонения, что приводит (рис. 6.18) к слабозатухающим колебаниям регулируемой величины около заданного хЗАД ее значения (удлиняется время регулирования).
Пропорционально-интегральный закон регулирования (ПИ-
регулятор). Устранить недостаток и сохранить преимущества пропорционального и интегрального регуляторов позволяет регулятор, обеспечивающий следующий закон регулирования:
(6.21)
Как видно, ПИ-регулятор имеет два параметра настройки: КР и ТИ. Параметр ТИ характеризует интенсивность ввода интеграла в закон регулирования.
Пропорционально-дифференциальный закон регулирования (ПД-
регулятор). Введение в закон регулирования производной отклонения регулируемой величины улучшает динамические свойства АСР:
(6.22)
Регулятор имеет два параметра настройки: КР и Тд. Коэффициент Тд называется временем дифференцирования, или временем предварения, т.к. наличие производной в законе регулирования обуславливает реакцию не только на саму ошибку А, но и на тенденцию ее изменения, как бы предвидя развитие событий.
Пропорционально-интегрально-дифференциальный закон регули-
рования (ПИД-регулятор) описывается уравнением
|
|
|
1 |
|
|
dΔ |
|
|
|
|
|
∫Δdt+T |
|
|
(6.23) |
|
|
|
|
|
|
T |
Д dt |
|
y Kp |
. |
|
|
|
И |
|
|
|
|
|
|
Наличие трех составляющих в законе регулирования (6.23) позволяет добиваться высокого качества процесса регулирования как при установившемся режиме, так и при неустановившихся режимах работы АСР.
Вышерассмотренные законы регулирования являются наиболее простыми, линейными и непрерывными. Для более сложных АСР, например комбинированных, применяются регуляторы, закон регулирования которых содержит в правой части слагаемые, зависящие от измеряемого возмущения f (t), его интегралов и производных.
6.4.4. Нелинейные законы регулирования
Наиболее распространенными среди этих законов являются релейные законы, при этом наиболее часто применяется двухпозиционный релейный закон регулирования. В этом случае регулирующий орган может занимать два фиксированных положения (позиции), соответствующие двум фиксированным значениям регулирующего воздействия, вырабатываемого релейными двухпозиционными регуляторами (Ри-регуляторами).
6.4.5. Усилительно-преобразовательные устройства
Усилитель является одним из основных элементов большинства систем автоматического контроля, регулирования и управления, так как мощность, развиваемая чувствительным элементом (датчиком) недостаточна (во многих случаях) для формирования управляющего воздействия. Эта мощность равна 10-4-10-5 Вт и не позволяет привести в действие последующие исполнительные элементы автоматической системы. Уже известный вам термоэлектрический термометр развивает на выходе сигнал всего лишь в несколько десятков мВ.
В зависимости от необходимой мощности для управления приводами ИМ и используемых в них видов энергии различают следующие усилители:
-электронные (ЭУ), когда требуется выходная мощность не более 100-150Вт;
-магнитные усилители, отличающиеся простотой и надежностью, но имеющие определенные недостатки (сложность получения большого входного сопротивления, чувствительность к изменению температуры среды, большие габариты и масса, чем у ЭУ);
-тиристорные усилительно-преобразовательные устройства,
наиболее распространены, так как обеспечивают большую выходную мощность и обладают компактностью устройства;
-пневматические усилители для пневматических ИМ;
587