

2598
.pdf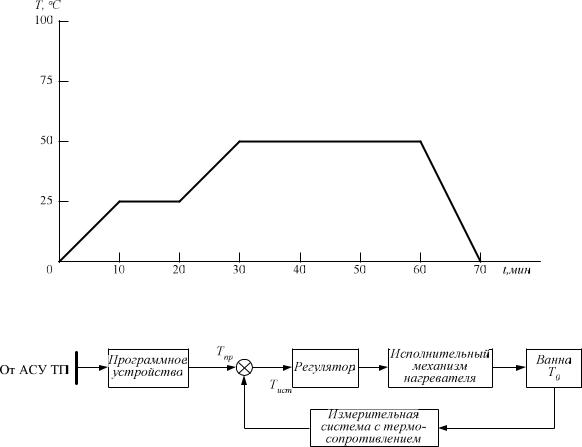
а |
б
Рис. 6.51. Изменение температуры среды при обработке изделий: а - температурновременная кривая раствора; б - структурная схема локальных систем автоматизации управления температурным режимом растворов
Это обусловило поиски новых путей развития автоматизации, а именно разработки программируемых и за счёт этого перестраиваемых средств, т.е. гибкого оборудования. К ним относятся станки с числовым программным управлением, промышленные роботы (ПР), робототехнические системы (РТС) и другие виды оборудования. Ещё большей гибкостью обладают системы на гибких элементах, управляемых ЭВМ как единым целым. Высшей формой автоматизации является гибкое автоматизированное производство (ГАП), а высшей формой ГАП - завод (фабрика)-автомат.
Гибкое производство - это в первую очередь такое производство, которое за короткое время при минимальных затратах, на том же оборудовании, не прерывая производственный процесс и не останавливая оборудование, по мере надобности позволяет переходить на выпуск новой продукции, в общем случае произвольной номенклатуры в пределах
627