- гидравлические усилители для гидравлических ИМ.
Магнитные усилители. Принцип работы одноконтактного МУ (рис. 6.19, а) следующий. При отсутствии тока Iy в обмотке подмагничивания (управления) Wу полное сопротивление обмоток ~W1 и ~W2 велико и на них происходит большое падение напряжения. При увеличении тока подмагничивания Iу сопротивления обмоток переменного тока W1 и W2 уменьшаются и возрастает ток нагрузки Iн в цепи обмотки реверсивного двигателя (рис. 6.19, б). Таким образом, изменением тока подмагничивания Iу управляется величина переменного тока Iсм в обмотках, включенных между зажимами двигателя и источника питания ~U, т.е. можно регулировать напряжение на зажимах исполнительного двигателя и, следовательно, скорость его.
б
а
в
Рис. 6.19. Принципиальная схема и кривые управления магнитного усилителя: 1 - исходная кривая; 2 - при введении обмотки смещения WCМ; ~W1 и ~W2 - обмотки переменного тока; Wу и WCМ - обмотки соответственно управления и смещения постоянного тока; Rн - сопротивление нагрузки (одна из обмоток реверсивного
двигателя ИМ); М - сердечник магнитопровода
Для возможности управления током Iн в зависимости от фазы (полярности) тока Iy в цепи управления, вводится дополнительно обмотка смещения WCМ.
Для устранения тока I0 в цепи нагрузки при отсутствии управляющего сигнала Iу применяют двухтактные МУ, представляющие встречное включение двух однотактных МУ. При этом при подмагничивании одного МУ двигатель ИМ вращается в одном направлении, а при подмагничивании другого МУ - в противоположном направлении. Кривая управления двухтактного МУ представлена на рис. 6.19, в.
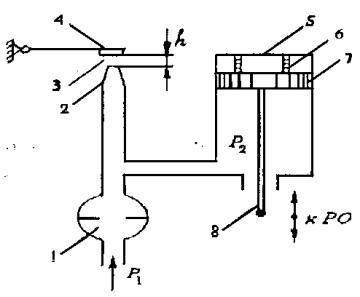
Пневматический усилитель типа «сопло - заслонка» является одним из распространенных усилителей в системах с пневматическим исполнительным приводом (рис. 6.20). Сжатый воздух с давлением Р1 проходит через дроссель с постоянным проходным сечением 1. В результате перемещения заслонки 4 каким-либо чувствительным элементом относительно сопла 2 изменяется величина h, что приводит к изменению пневмосопротивления в переменном дросселе 3, а в междроссельной полости устанавливается давление Р2 (отличное от Р1),
|
|
|
|
|
|
|
|
действующее на поршень 7 исполнительного |
механизма 5, шток 8 |
|
которого |
|
связан |
с |
|
регулирующим |
органом. |
|
Поршень 7 |
будет |
переме- |
|
шаться до |
тех |
пор, пока |
|
не |
наступит |
пор, |
пока |
не |
|
наступит равновесие между |
|
силой, с которой сжатый |
|
воздух давит на поршень, и |
|
упругими силами пружины |
|
6. При этом усилие, |
|
развиваемое |
|
вдоль |
штока |
|
поршня, |
|
значительно |
|
превышает |
|
|
|
усилие |
|
чувствительного |
элемента, |
|
необходимое |
|
|
|
|
для |
Рис. 6.20. Пневматический усилитель типа |
перемещения |
заслонки |
4. |
“сопло-заслонка” |
Коэффициент |
усиления |
по |
|
мощности |
|
|
некоторых |
пневматических усилителей достигает 105 -107.
6.4.6. Реле
Реле - это устройство автоматики, преобразующее заданное значение контролируемой величины в скачкообразное изменение состояния управляемой цепи (например, ее замыкание или размыкание).
Реле широко используется в управлении поточно-транспортной системой (ПТС) различных технологических процессов, а также для про-
граммного управления отдельным оборудованием (стиральная машина, аппараты химчистки, холодильники и т.д.).
Реле бывают электрическими, гидравлическими, пневматическими и комбинированными. Среди электрических реле большое распространение получили электромеханические реле, которые в свою очередь подразделяются на электромагнитные (постоянного и переменного тока); магнитоэлектрические; электродинамические; индуктивные; электротермические. В свою очередь реле постоянного тока подразделяют на нейтральные и поляризованные. Нейтральное реле одинаково реагирует на постоянный ток обоих направлений, протекающий по его обмотке. Действие поляризованного реле зависит от направления тока.
Электромагнитное реле переменного тока
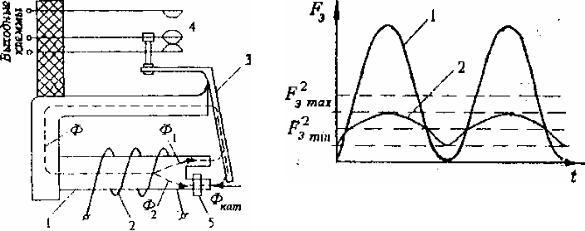
Особенностью реле переменного тока (рис. 6.21) является возникновение пульсаций магнитного потока, вследствие чего происходит пульсация электромагнитной тяговой силы (рис. 6.22). Поэтому происходит вибрация якоря 3 и контактов 4, обуславливающая подгорание контактов и снижающая надежность реле в работе.
Рис. 6.21. Схема устройства |
Рис. 6.22. Зависимость тягового усилия |
электромагнитного реле: 1 - ферро- |
реле без короткозамкнутого витка (1) и |
магнитный сердечник; 2 - обмотка; 3 - |
с |
якорь; 4 - контакты; 5 - |
короткозамкнутым витком (2) |
короткозамкнутый виток |
|
Для устранения вибрации обычно применяют короткозамкнутый виток 5, устанавливаемый на расщепленном полюсе ферромагнитного сердечника 1. Благодаря этому переменный магнитный поток Ф катушки 2 разветвляется на два потока Ф1 и Ф2.
Поток Ф2 наводит в короткозамкнутом витке 5 ЭДС и, следовательно в нем возникает ток, который создает свой магнитный поток ФКАТ, направленный навстречу потоку Ф2, его вызвавшему. Поток ФКАТ замедляет изменение основного магнитного потока Ф2, проходящего через экранированную короткозамкнутым витком часть полюса. Поэтому результирующая тяговая сила FЭ (кривая 2) хотя и имеет пульсирующий характер, но ее мгновенное значение, изменяясь от FЭ max до FЭ min, не снижается до нуля, и при этом тяговая сила в течение всего времени больше противодействующих механических сил.
Реле времени. В практике управления технологическим процессом и отдельным оборудованием часто возникает необходимость включения цепей управления по истечению определенного времени после достижения регулируемым параметром заданного значения. Для этой цели применяют реле времени (РВ).
Замедление срабатывания (отпускания) реле, обеспечивающее задержку появления (исчезновения) выходного сигнала после подачи (снятия) входного сигнала, осуществляется электрическими (схемными), механическими или конструктивными методами.
РВ бывают: а) тепловые; б) моторные; в) электронные (полупроводниковые); г) электромагнитные с электронным, пневматическим и др. механическими замедлителями.
Выдержка времени бывает от долей секунд до нескольких минут. Реле имеют разные наборы контактов: замыкающие и размыкающие
с выдержкой времени при замыкании или размыкании входных цепей реле, а также мгновенно срабатывающие контакты.
Серийно выпускаются: электронные реле времени серии ВЛ; моторные реле времени серии МРВ; программные реле серии ВС-10; а также командные электропневматические приборы типа КЭП-12 для управления (до 12) электрическими и пневматическими цепями.
Герконы - это особый тип реле, представляющий наполненную инертным газом герметизированную стеклянную ампулу с контактными пружинами, помещенную внутри цилиндрической катушки. При пропускании тока по катушке контактные пружины притягиваются друг к другу и замыкают управляющую цепь. Эти реле отличаются высокой надежностью и малыми размерами, частота срабатываний может достигать сотен герц. Диаметр ампулы реле равен 5 мм, а ее длина 20 мм. Срок службы их достигает 108-1012 циклов, тогда как у выше - рассмотренных реле он составляет 106 циклов.
6.4.7. Исполнительные механизмы и регулирующие органы
Исполнительное устройство АСР состоит из двух функциональных блоков: исполнительного механизма (ИМ) и регулирующего органа (РО).
Исполнительный механизм под действием управляющего воздействия регулятора у(t) преобразует вспомогательную энергию в перестановочное усилие, благодаря чему перемещается затвор регулирующего органа, изменяющего, например, количество вещества или энергии, поступающего в объект (подачи пара, электроэнергии, газа и т.п.). Дополнительно с помощью ИМ решаются и другие задачи управления: пуск и останов самого технологического процесса, а также различных машин и механизмов по ходу процесса. Исполнительные механизмы бывают: электрические, пневматические, гидравлические, а также комбинированные. Достоинством электрических ИМ является возможность дистанционного управления и простота конструкции. Они в свою очередь подразделяются на электродвигательные и электромагнитные (соленоидные).
Электродвигательные ИМ. Основным элементом их конструкции является электродвигатель. Как правило, используются двигатели переменного тока. В зависимости от диапазона поворота выходного вала ИМ бывают однобортные и многобортные. Характеристикой ИМ является
номинальный крутящий момент на выходном валу (Н.м), который указывается в числителе индекса механизма, и время одного оборота вала (с).
Позиционные ИМ предназначены для перемещения регулирующего органа в одно из фиксированных положений. Примерами таких ИМ являются механизмы для двухпозиционного регулирования типов ДР-М, ДР1М и др. Эти ИМ чаще работают в комплекте с двухпозиционными регуляторами.
Пропорциональные ИМ обеспечивают перемещение РО в соответствии с величиной управляющего воздействия. К ним относятся ИМ типов ПР-1М, ПР-М, ИМ-2/120, МЭО и др. Пропорциональные ИМ используются в системах, оснащенных регуляторами непрерывного действия. Системы управления ИМ делятся на релейно-контактные и бесконтактные. Релейно-контактное управление осуществляется посредством различных реле, трехфазных релейных контакторов и магнитных пускателей. Основным недостатком релейно-контактных систем управления электроприводами ИМ является их пониженная надежность, что связано с подгоранием и залипанием контактов. Поэтому в последние десятилетия все большее распространение стали получать бесконтактные системы управления электродвигательными ИМ.
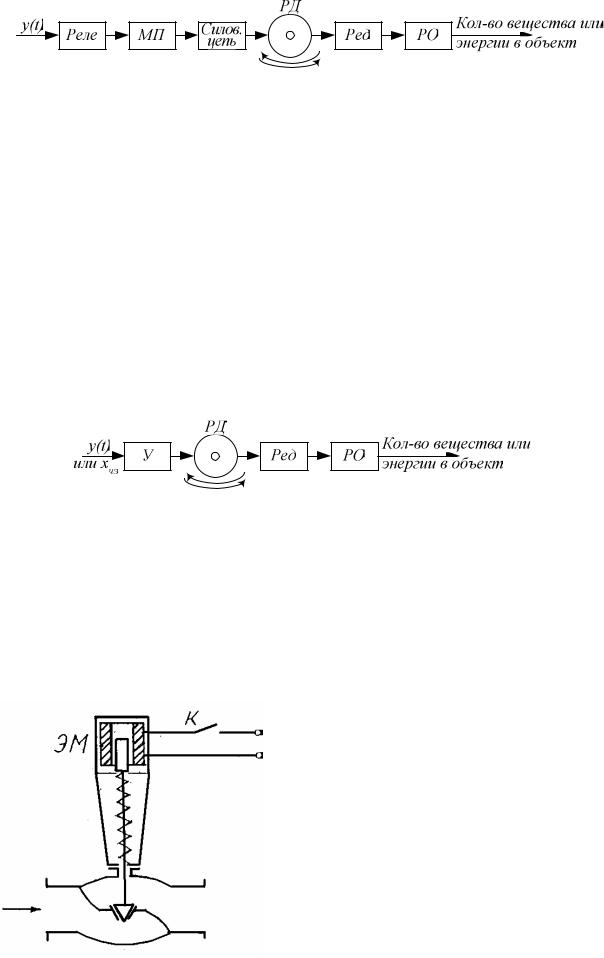
Релейно-контактное управление ИМ. Блок-схема управления представлена на рис. 6.23.
Рис. 6.23. Блок-схема релейно-контактного управления ИМ
Сигнал управления регулирующего устройства у(t), которым, в частности, может быть выходной сигнал чувствительного элемента хчэ (например, положение поплавкового уровнемера), воздействует на включение реле, которое своими контактами включает реверсивный магнитный пускатель МП, включающий соответствующую фазу силовой цепи (силовую цепь) питания реверсивного двигателя РД, выходной вал которого сочленен с редуктором Ред, управляющим РО, а последний изменяет свое положение на увеличение или уменьшение количества вещества или энергии в объект регулирования.
Бесконтактное управление ИМ. Для такого управления часто используются дроссели насыщения или магнитные усилители МУ. В общем случае блок-схему управления ИМ бесконтактным способом можно представить, как на рис. 6.24.
Рис. 6.24. Блок-схема бесконтактного управления ИМ
В этих системах обязательным является применение усилителей У, обусловленное тем, что мощности выходного сигнала хчэ ЧЭ (датчика), несущего информацию об изменении технологических параметров, как правило, очень малы.
Электромагнитные ИМ. По виду движения исполнительного органа они подразделяются на ходовые и электромагнитные муфты с вращательным движением.
Электромагнитные ИМ применяются в системах позиционного (чаще двухпозиционного) регулирования, а также для привода различных механизмов в системах автоматического дистанционного управления. Основным рабочим органом ИМ с прямолинейным движением является тяговый
593
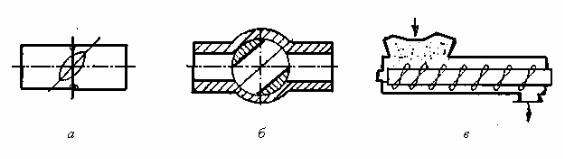
Рис. 6.25. Схема электромагнитного клапана
электромагнит (соленоид). Применяются электромагнитные приводы как переменного, так и постоянного тока, однако последние используются реже, так как требуют дополнительных выпрямительных устройств.
Основными достоинствами электромагнитных ИМ являются простота конструкции и высокое быстродействие (по сравнению с электродвигательными механизмами). Однако они развивают меньшие перестановочные усилия и отличаются меньшей надежностью в работе.
Схема электромагнитного соленоидного клапана приведена на рис. 6.25. При замыкании управляющего контакта К электромагнит ЭМ возбуждается и втягивает якорь, в результате чего клапан открывается. При размыкании контакта К якорь электромагнита под действием возвратной пружины перемещается вниз и клапан закрывается.
Электромагнитная муфта является связующим звеном между приводом и рабочим механизмом. Они подразделяются на муфты фрикционного сухого трения, вязкого трения и индукционные.
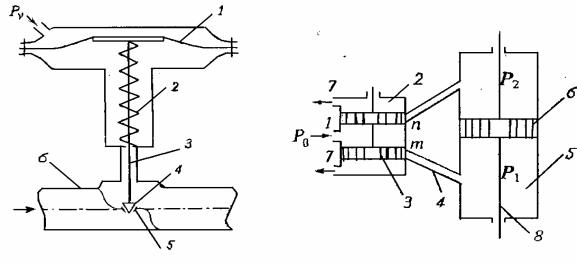
Пневматические ИМ особо удобны в условиях централизованного пневмохозяйства, не требующего использования индивидуальных компрессоров. Существенным достоинством их является взрыво- и пожаробезопасность, а также самоблокировка при аварийном отключении питания. В пневматических исполнительных механизмах усилие, необходимое для перестановки регулирующего органа, создается управляющим сигналом в виде давления сжатого воздуха Py, действующего на мембрану или поршень.
Рис. 6.26. Схема устройства пневматическ |
Рис. 6.27. Схема гидравлического |
мембранного ИМ прямого действия |
поршневого ИМ |
Прямолинейные мембранные или поршневые ИМ, дополненные рычажной передачей, создают поворотное перемещение регулирующего органа (например, заслонки в трубопроводе). На рис. 6.26 представлена
схема устройства мембранного ИМ прямого действия, сочлененного с односедельным клапаном, установленным на трубопроводе с малыми расходами вещества. Мембрана с жестким центром связана со штоком 3, на конце которого располагается односедельный клапан 4. Цилиндрическая пружина 2 опирается на регулировочную гайку (на схеме не показано), с помощью которой регулируется степень предварительного сжатия пружины 2. При подаче в рабочую полость ИМ сжатого воздуха (управляющий сигнал давления Ру) усилие, развиваемое мембраной, передается на шток 3, перемещение которого пропорционально давлению сжатого воздуха Ру .
Перемещение регулирующего органа 4 (клапана) прекратится, когда упругое противодействие пружины 2 станет равным силе, действующей со стороны мембраны.
Гидравлические ИМ в основном бывают поршневого типа. Они применяются при давлении рабочей жидкости в диапазоне 2,5·106-2·107 Па, следовательно, могут развивать большие перестановочные усилия при небольших размерах.
На рис. 6.27 показана схема действия гидравлического поршневого ИМ двухстороннего действия с золотниковым управлением. Масло по трубе 1 под давлением Р0 подается в цилиндрический золотник 2 с двойным поршнем 3. В нейтральном положении, изображенном на рисунке, золотник закрывает оба окна п и т, через которые по соединительным каналам 4 масло может поступать в рабочий цилиндр 5. Если поршень золотника перемещается вверх от нейтрального положения, то масло начнет поступать в полость рабочего цилиндра, расположенную над поршнем 6, а последний благодаря разности давлений (Р2>Р1) будет перемещаться вниз. Масло из-под поршня будет сливаться через сливную трубку 7. При перемещении поршня золотника вниз поршень 6 будет двигаться в обратном направлении. Шток 8 перемещает регулирующий орган, например клапан на трубопроводе.
В зависимости от моделей ИМ для перемещения поршня золотника требуется усилие 0,2-50 Н, а усилие, развиваемое штоком 8, в 103 раз больше. Таким образом, гидравлический исполнительный механизм является одновременно гидравлическим усилителем силы и мощности.
Регулирующие органы. Осуществляют непосредственное воздействие на объект путем изменения расхода вещества или энергии, подаваемых в объект или отводимых из него. РО можно классифицировать по конструкции, виду энергии, способу перестановки и т.д. Примеры сочленения игольчатых клапанов с электромагнитным и пневматическим ИМ даны соответственно на рис. 6.25 и 6.26.
Рис. 6.28. Типы регулирующих органов: а - с поворотной заслонкой; б - край; в - тисковый
По количеству потоков регулируемого вещества различают одно- и двухседельные РО. По конструктивным особенностям различают РО: шланговые и диафрагменные клапаны, с поворотной заслонкой (рис. 6.28, а), краны (рис. 6.28, б), регулирующие реостаты в электрических системах, различные питатели для регулирования расхода сыпучих материалов (порошков, клея и др.), среди которых распространены скребковые, ленточные, шнековые (рис. 6.28, в).
Для агрессивных сред применяют диафрагменные и шланговые клапаны, в которых конструкция металлического корпуса изолируется от агрессивной среды диафрагмой с кислотостойкой футеровкой или кислотостойким резиновым шлангом.
Для регулирования больших расходов применяют поворотные заслонки. Краны применяют для регулирования расходов жидкости и газов в трубопроводах небольшого сечения. Их преимуществом является простота сочленения с электрическими однооборотными ИМ.
6.4.8. Управление приводами машин и механизмов
Задачей системы управления приводами является организация пуска и торможения машин и механизмов, переход с одной ступени скорости на другую, реверс и осуществление этих операций в определенной последовательности во времени или по командам от машин, завершивших очередную технологическую операцию. Эти функции, как правило, являются логическими, определенная их очередность выполнения представляет жесткую программу выполнения операций и реализуется на релейно-кон- тактной аппаратуре при относительно небольшом числе срабатываний ее в час или на бесконтактной аппаратуре, например тиристорных переключателях и др., при большом числе срабатываний.
Основными элементами релейно-контактных систем автоматики являются реле, контакторы, магнитные пускатели, кнопки управления, командоконтроллеры, универсальные переключатели, технологические датчики, конечные и путевые выключатели и др.
596
Контактор - это двухпозиционный аппарат с самовозвратом, предназначенный для частых включений и отключений в силовых цепях. В качестве пускорегулирующей аппаратуры дистанционного действия они применяются для управления приводами мощностью до 20 кВт. Контакторы обладают высокой механической износоустойчивостью и обеспечивают до 1500 срабатываний в час.
Магнитные пускатели - это специальные пусковые устройства, состоящие из одного или двух контакторов, тепловых реле и кнопок управления, применяемые в основном при управлении пуском, реверсом, остановом трехфазных асинхронных двигателей.
На рис. 6.29 приведена схема дистанционного управления асинхронным двигателем с одного места, в котором имеются силовые цепи подключения двигателя к питающей сети, цепи управления с кнопками управления, катушками контакторов и вспомогательными контактами, а также цепи сигнализации с сигнальными лампами и вспомогательными контактами.