


y(t) 
А'
t
Т'
Рис. 1.10. Переходная характеристика устойчивогоИавтоколебательного процесса
Если на систему подавать сигналД, частота которого может совпадать с частотой собственных колебанийАсистемы, то в системе м огут
возникать резонансные явления, может произойти скачок амплитуды. В общем случае при приложениибвнешних периодических воздействий возникает наложение со ственных и внешних колебаний. При увеличении амплитуды внешнихивоздействий может произойти срыв автоколебаний собственной частоты, и система переходит на частоту внешних колебан й. Такой режим работы нелинейной системы называется синхронныйС. Важна также скорость приложения внешнего воздействия. При скачкообразном воздействии может быть такое перерегулирование, что выводит систему в совершенно другую область притяжения и с другим режимом, по сравнению с тем случаем, когда такое же по величине воздействие было бы подано плавно.
1.6. Примеры нелинейных автоматических систем
Рассмотрим в качестве примера нелинейной системы автоматическую систему стабилизации напряжения с нелинейным управляющим устройством (рис. 1.11). Регулируемой величиной является стабилизированное напряжение UН на сопротивлении RН. Для сглаживания пульсаций напряжения U0, создаваемых регулирующим транзистором T, работающим в ключевом режиме, между транзистором T и нагрузкой RН включен LC-фильтр с нулевым диодом D.
19
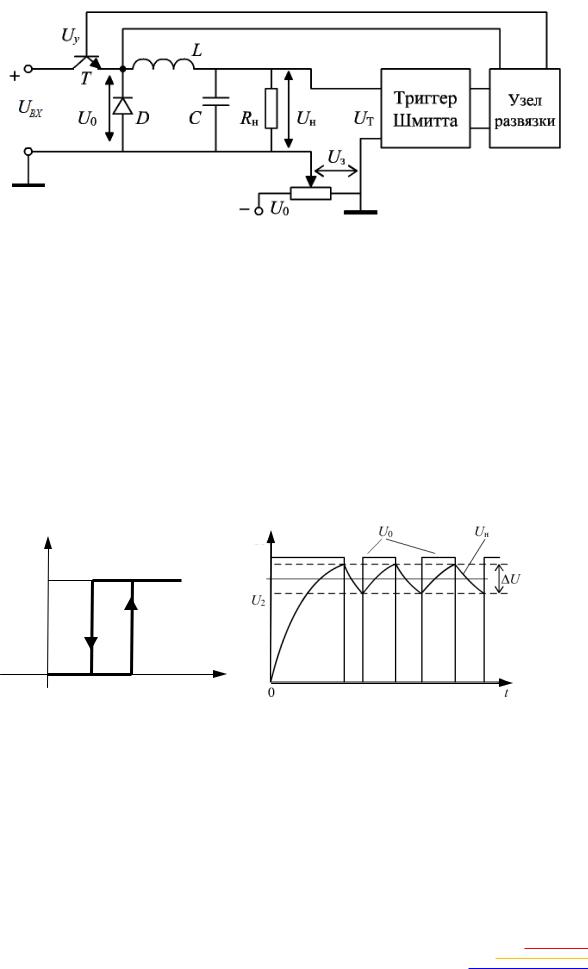
Рис. 1.11. Релейная автоматическая система стабилизации напряжения
Управляющим устройством является триггер Шмитта, реализуе-
поступает разность задающего напряжения UИЗ и регулируемой величины UН. При достижении разности этих напряжений пороговых значений переключения триггера U2 и U1 последний изменяет состояние на своем выходе, переключает регулирующий транзистор поочередно в режимы
мый на операционном усилителе, статическая характеристика которого
имеет форму петли гистерезиса (рис. 1.12, a). На вход триггера Шмитта
отсечки и насыщения. Форма выходногоДнапряжения системы стабилизации показана на рис. 1.12, б. Размах пульсаций U выходного напря-
жения определяется шириной зоны гистерезиса релейного элемента –
триггера Шмитта. |
|
|
А |
|
|
|
|
|
||
|
|
|
|
U2 |
|
UН |
|
|
||
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
б1 |
|
|
|
|
|
|
|
UУ |
|
и |
|
|
|
|
|
|
U |
|
|
U2 |
|
|
|||||||
|
|
|
|
|
|
|
б |
|||
|
|
|
|
|
|
|
|
|||
|
С |
а |
|
|
|
|
|
|
||
0 |
|
|
|
|
|
|
|
|
||
U2 U1 UT |
|
|
|
|
|
|
|
|||
Рис. 1.12. Характеристики системы стабилизации напряжения
Еще одним примером нелинейной автоматической системы является следящий гидропривод – это регулируемый гидропривод, в котором закон движения выходного звена (вала гидромотора или штока гидроцилиндра) изменяется в зависимости от управляющего воздействия. На рис. 1.13 представлена упрощенная принципиальная схема следящего гидропривода одноковшового экскаватора, представляющего собой автоматическую систему, работающую по отклонению.
20
|
|
1 |
|
4 |
SШТ |
uизм |
QН |
|
u |
iзол |
|
|
|
|
uзад 2 |
|
3 |
|
|
5 |
6 |
И |
|
||
|
Д |
|
Рис. 1.13. Принципиальная схема следящего гидропривода
Для достижения заданного положения штока исполнительного
гидроцилиндра 4, перемещающего рукоять стрелы экскаватора, вво- |
|
|
б |
дится отрицательная обратная связь с датчиком положения. Текущее |
|
положение штока гидроцилиндра SШТ измеряется потенциометриче- |
|
и |
|
ским датчиком положения 1. АСигнал uизм, пропорциональный изме- |
|
ренному значению перемещен я, передается на электронный усили- |
|
С |
|
тель ЭУ 2, где сравн вается с заданным значением uзад. Далее ошибка регулирования u ус л вается, и управляющий ток iзол подается на обмотку электрогидрораспределителя ЭГР 3. Посредством электро-
магнита золотник распределителя перемещается в нужное положение, направляя поток рабочей жидкости в нужную полость гидроцилиндра 4. Скорость перемещения штока исполнительного гидроцилиндра пропорциональна номинальной подаче рабочей жидкости QН от гидронасоса 5, приводимого валом отбора мощности 6 от двигателя внутреннего сгорания экскаватора. В качестве задатчика З может использоваться джойстик, преобразующий перемещение управляющего рычага в сигнал uзад, пропорциональный требуемому перемещению штока гидроцилиндра.
Нелинейность в системе возникает из-за электрогидрораспределителя, золотник которого имеет три положения: +xзол – жидкость поступает в штоковую полость гидроцилиндра, –xзол – жидкость посту-
21
пает в поршневую полость гидроцилиндра и 0 – сечения распредели- |
||||||||||||||||
теля закрыты – шток неподвижен (рис. 1.14). Из-за различия площа- |
||||||||||||||||
дей внутренних полостей гидроцилиндра SШТ и SП скорость переме- |
||||||||||||||||
щения штока гидроцилиндра VШТ при втягивании/выдвижении будет |
||||||||||||||||
различной в зависимости от направления рабочей жидкости, этой |
||||||||||||||||
конструктивной особенностью обуславливается другая нелинейность |
||||||||||||||||
следящего гидропривода – переменная структура. |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+QН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–xзол |
+xзол |
|
xзол |
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
– QН |
|
|
|
|
|
|
|
|
|
|
Рис. 1.14. Релейная характеристика распределителя |
|
|
|
|||||||||
|
Основываясь на принципиальной схеме и приведенном описа- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
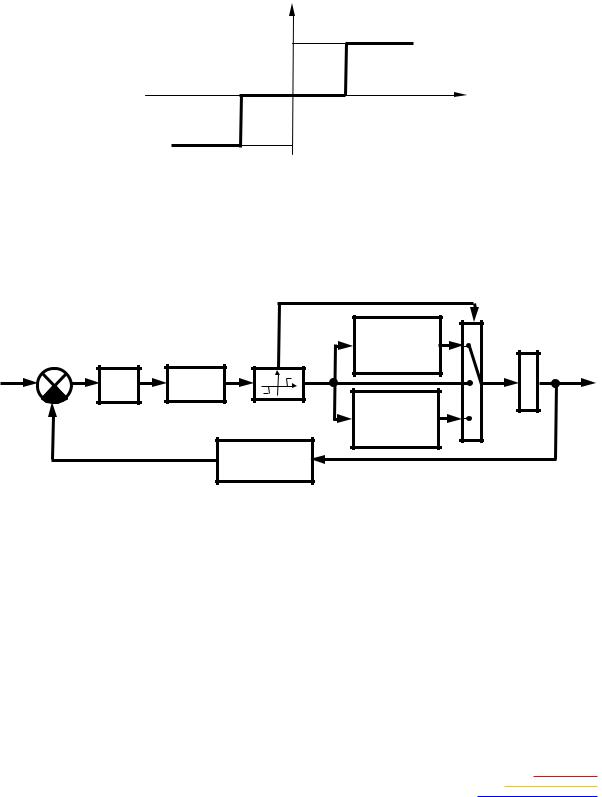
нии гидропривода, можно представить структурную схему следящего |
||||||||||||||||
гидропривода (рис. 1.15). |
|
|
|
Д |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
А |
|
Скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выдвижения |
|
|
|
|
|||
uзад |
|
|
u |
ЭУ |
iзол |
|
x |
зол |
|
Q |
|
штока |
V |
ШТ |
|
SШТ |
|
|
|
|
|
ЭГРб |
|
|
|
|
|
∫ |
|
||||
|
– |
|
|
|
|
и |
|
|
|
Скорость |
|
|
|
|||
|
|
uизм |
|
|
|
|
|
втягивания |
|
|
|
|
||||
|
|
|
|
|
|
|
|
штока |
|
|
|
|
||||
|
|
|
|
С |
|
Датчик |
|
|
|
|
|
|
|
|||
|
|
|
|
положения |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 1.15. Структурная схема автоматизированного следящего гидропривода |
||||||||||||||||
Ярким примером существенно нелинейных систем могут быть автоматические системы с релейным исполнительным механизмом, системы, в которых учитываются зазоры, люфты и конструктивные ограничения величин.
22