

4.7. Нелинейные системы с переменной структурой
Структура системы определяется составом звеньев и связями между ними. Изменить структуру системы – это значит изменить состав её элементов или связи между звеньями.
Системой с переменной структурой (СПС) называют систему,
вкоторой структура в процессе её функционирования изменяется на основе текущей информации для достижения определенной цели: обеспечение устойчивости, улучшение качества и т.п.
Использование принципов построения СПС при синтезе систем управления позволяет достичь устойчивости и приемлемого качества
втех случаях, когда параметры объекта изменяются в широких пре-
делах или отсутствует информация, необходимая для реализации обычных алгоритмов управления с фиксированнойИструктурой, обеспечивающих заданные требования к системе.
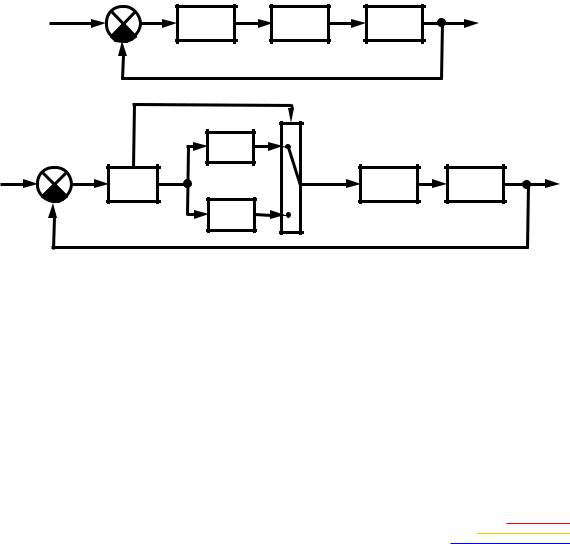
Пусть линейная АСУ с жесткойДотрицательной обратной связью имеет структурную схему, представленную на рис. 4.14, а.– А
б |
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
и |
K1 |
|
|
y |
|
u(t) = 0 |
|
x |
|
z |
|
|||
|
|
|
|
|
УУ |
ОУ |
||
|
|
|
ЛПУ |
|
|
|
||
|
– |
С |
|
K2 |
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 4.14. Структурная схема системы с переменной структурой
Пусть устройство управления УУ вместе с объектом управления ОУ и регулятором Р, использующим пропорциональный закон управления (z = –yKП), образуют линейную часть системы, которая описывается передаточной функцией
W ( p) = |
K |
. |
(4.43) |
ЛЧ |
T 2 p2 |
|
|
|
136 |
Общее дифференциальное уравнение динамики замкнутой системы без переменной структуры (см. рис. 4.14, а) в операторной форме при u(t) = 0 будет иметь вид
T 2 p2 y = −Ky . |
(4.44) |
Тогда характеристическое уравнение замкнутой системы |
|
T 2 p2 + K = 0 . |
(4.45) |
При K > 0 его корни будут чисто мнимыми p1,2 = ± jω, а при K < 0
– действительными разных знаков p1,2 = ±αi. Следовательно, в первом случае в системе имеется устойчивый предельный цикл, т.е. она обладает устойчивыми автоколебаниями, а во втором случае она асимптотически неустойчива. Таким образом, в рамках фиксированной структуры не удается синтезировать асимптотическиИустойчивую систему.
логическое переключающее устройство (ЛПУ).
Для обеспечения устойчивого переходного процесса и уменьшения автоколебаний в установившемсяДрежиме используется
Логическое переключающее устройство в СПС обеспечивает
динамическую характеристикуАсистемы и добиться устойчивого переходного процессаипри неустойчивой характеристики основной части системы. Особенно эффективно ЛПУ для создания скользящего режима работыС, который может быть заранее заданным вне зависимости от параметров основной части системы.
изменение структурной схемы при переходе изображающей точки на
фазовом пространстве через некоторую, заранее определенную границу. Это дает дополнительнуюбвозможность существенно изменить
Введем в рассмотренную выше систему переменную структуру (рис. 4.14, б). Введем новые переменные состояния xi(t) вместо (i–1) производных выходной величины y(t) в формуле (4.44) и получим дифференциальное уравнение фазовых траекторий системы
|
|
Ki |
|
x1 |
|
|
|
x2 |
= − |
|
. |
(4.46) |
|||
|
|
|
|||||
|
T |
2 |
|
x2 |
|
||
x1 |
|
|
|
|
|||
Проинтегрировав последнее уравнение, получим алгебраическое уравнение фазовых траекторий в виде эллипса с полуосями по оси абсцисс x1 и по оси ординат x2
x2 |
|
x2 |
|
|||
1 |
+ |
2 |
= С . |
(4.47) |
||
T 2 |
|
|||||
|
Ki |
|
||||
|
|
|
|
|
|
137 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
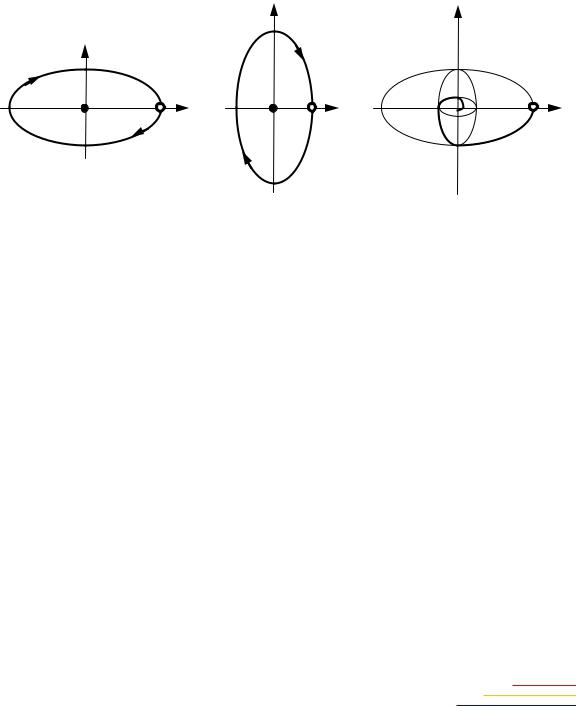
Большая полуось эллипса при Ki = K1 < T2 располагается на оси абсцисс (рис. 4.15, а), а при Ki = K2 > T2 – на оси ординат (рис. 4.15, б). Фазовая траектория в первом случае имеет большую амплитуду колебания, но сравнительно небольшую скорость выходной величины. А во втором случае, наоборот, имеет сравнительно небольшую амплитуду, но значительную скорость выходной величины.
Задача ЛПУ в том, чтобы переменно использовать положительные свойства каждой фазовой траектории. Для изменения структуры системы с помощью ЛПУ необходимо принять логический алгоритм управления (ЛАУ), согласно которому система автоматически выбирает оптимальную траекторию движения.
а |
|
б |
x2 |
|
|
в |
x2 |
|
|
|
|
|
И |
I |
|
|
x2 |
|
|
|
|
II |
|
|
|
Д |
|
|
|||
|
x1 |
|
А |
x1 |
|
|
x1 |
|
|
|
|
|
III |
IV |
|
|
|
|
|
|
|
||
Рис. 4.15. Фазовые траектории нелинейной |
СУ с переменной структурой |
||||||
Если во II и IV квадрантах фазовой плоскости [x1; x2] изобра- |
|||||||
|
С |
|
|
|
|
|
|
жающая точка будетидв бгаться по фазовым траекториям, представленным на рис. 4.15, а, а в I III квадрантах – по фазовым траекториям, представленным на рис. 4.15, б, то общая фазовая траектория типа эллипса переходит к устойчивому фокусу (рис. 4.15, в). В этом случае
полученная СПС асимптотически устойчива.
Математически описать ЛАУ можно следующей нелинейной
функцией: |
|
|
|
|
−K y при x x |
< 0; |
(4.48) |
||
z = |
1 |
1 2 |
> 0. |
|
−K2 y при x1 x2 |
|
|||
С помощью ЛПУ можно создать различные переходные процессы, но особый интерес представляют такие ЛПУ, реализующие скользящий процесс, который не зависит от параметров основной части системы и может протекать с заранее заданными свойствами.
Рассмотрим работу системы (рис. 4.16), в которой устройство управления УУ вместе с объектом управления ОУ образуют линей-
138
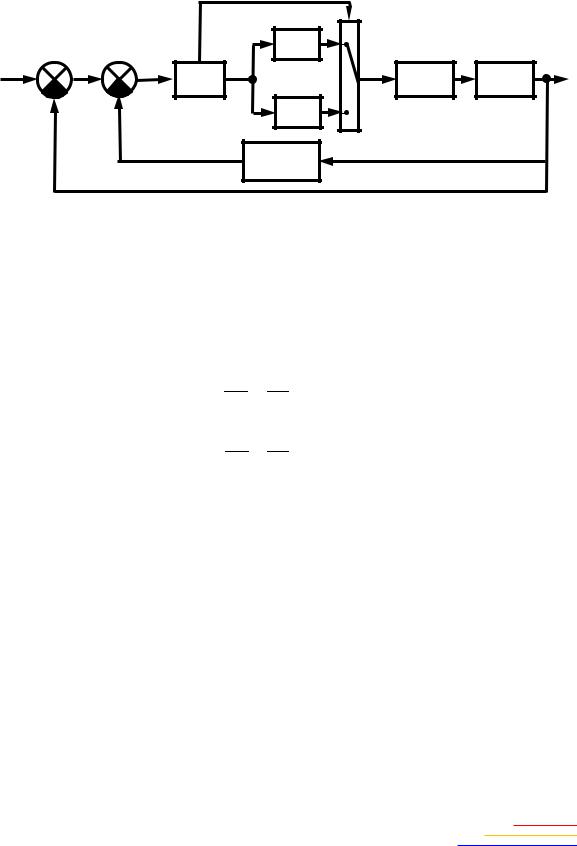
ную часть системы, описываемую передаточной функцией (4.43). Кроме этого, в системе имеется местная гибкая отрицательная обратная связь, описываемая передаточной функцией
WГОС ( p) = KОС p . |
(4.49) |
|
|
|
|
|
|
|
|
|
+K |
|
|
|
y |
u(t) = 0 |
|
ЛПУ |
|
|
|
|
|
|
|
z |
УУ |
ОУ |
|
– |
|
|
|
|
|
|
|
|
|||||
– |
|
|
|
|
|
|
|
–K |
|
|
|
|
|
|
y'KOC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ГОС |
И |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.4.16. Структурная схема системы с переменной структурой |
|
||||||||||||
В СПС ЛПУ переключает звенья, коэффициенты которых равны |
|||||||||||||
|
|
|
|
|
2А |
|
|
|
|
||||
по модулю, но имеют противоположные знаки. Тогда согласно форму- |
|||||||||||||
ле (4.46) получим уравнения фазовых траекторий в виде эллипса при |
|||||||||||||
|
|
бx x |
|
Д |
|
|
|
||||||
+K и в виде гиперболы при –K. |
|
|
|
|
|
|
|
|
|||||
|
и |
x2 |
+ |
x2 |
= С; |
|
|
|
(4.50) |
||||
|
|
|
1 |
|
2 |
|
|
|
|
|
|||
|
С |
T |
|
|
|
K |
|
|
|
|
|
||
|
|
|
|
2 |
− |
|
2 |
= С. |
|
|
|
(4.51) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 |
2 |
|
|
|
|||||
|
|
T |
2 |
|
K |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
Гибкая отрицательная обратная связь обеспечивает скользящий |
|||||||||||||
режим работы в системе. Уравнение линии переключения |
|
|
|||||||||||
|
|
x1 + x2 KOC = 0 . |
|
|
|
(4.52) |
|||||||
В такой системе ЛПУ работает по следующему ЛАУ. В I ква д- ранте и части IV квадранта фазовой плоскости [x1; x2] (до линии переключения) включается звено +K. А также в III квадранте и части II квадранта (до линии переключения) тоже включается звено +K (рис. 4.17). Изображающая точка идёт по замкнутому циклу (4.50). Во II квадранте от линии переключения до положительной полуоси x2 и в IV квадранте от линии переключения до отрицательной полуоси x2 включается звено –K. Изображающая точка идёт по фазовой траектории «седло» c сепаратрисой С. При любом начальном значении x10; x20 сис-
139
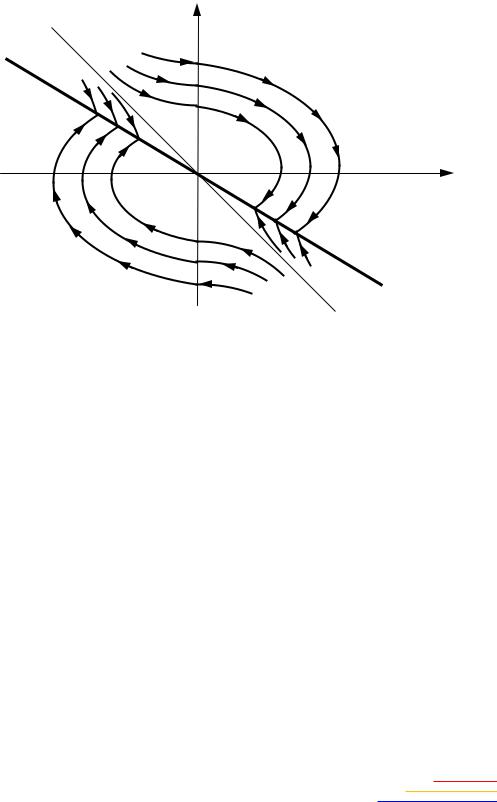
тема стремится к линии переключения и по ней к устойчивому состоянию. Это устойчивое состояние может быть автоколебательным с достаточно малой частотой и амплитудой. Оно может иметь устойчивое равновесное состояние. Необходимо отметить, что при равенстве модулей |+K| = |–K| фазовые траектории всегда попадут на линию переключения и система дальше пойдёт по скользящему режиму. Это не зависит от абсолютного значения величины коэффициента K.
Сx2 = y
|
|
|
|
|
|
|
|
0 |
|
И |
|
x1 = y |
||||||
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
x1 + x2 KOC = 0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 4.17. Фазовый портрет нелинейной СУ с переменной структурой |
||||||||||||||||||
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
в скользящем режиме |
|
|
|
|
|
|
|
|
|||||
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Математически оп бсать ЛАУ можно следующей нелинейной |
||||||||||||||||||
функцией: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(y + pyKОС ) |
|
|
|
|
x1 |
|
|
|
|
|
|||
|
|
−K1 |
при x1 x2 |
+ |
|
|
|
> 0; |
|
|||||||||
|
|
|
|
|
||||||||||||||
|
z = |
|
|
|
|
|
|
|
|
|
|
KОС |
|
|
(4.53) |
|||
|
|
|
|
|
|
|
|
|
x |
|
|
x1 |
|
|
|
|||
|
|
+K |
2 |
(y + pyK |
ОС |
) |
при x |
+ |
|
< 0. |
|
|||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
KОС |
|
|
|
||
В заключение стоит отметить, что выбор ЛАУ должен полностью соответствовать требованиям, предъявляемым к качеству переходного процесса системы. Широкие возможности ЛАУ позволяют существенно повысить точность регулирования, в разы снизить перерегулирование и уменьшить время регулирования, а также значительно расширить область устойчивости системы, т.е. расширить область допустимых нагрузок и управляющих воздействий.
140