

2.14. Прямой метод Ляпунова
Данный метод А.М. Ляпунова, являющийся также вторым методом, основан на построении специальных функций (функций Ляпунова) по исходным нелинейным дифференциальным уравнениям, описывающим поведение системы. Данные скалярные функции, характеризуют динамические свойства нелинейной системы и позволяют сделать вывод о её устойчивости.
В общем случае свободное движение нелинейной динамической системы описывается системой дифференциальных уравнений состояния 1-го порядка в форме Коши. Напомним, что данные уравнения получаются путём введения в исходное уравнение системы новых переменных состояния xi(t) вместо (i – 1) производных выходной величины y(t):
x |
= |
f |
(x ; x ;...x ); |
|
||||
|
|
|
|
|
Д |
|
||
|
1 |
|
1 |
|
|
|||
= |
1 2 |
n |
|
|
||||
x2 |
f2 (x1; x2 ;...xn ); |
|
||||||
|
|
|
|
|
|
|
И |
(2.159) |
|
|
А |
|
|||||
... |
|
|
|
|||||
|
|
= |
fn (x1; x2 ;...xn ), |
|
||||
xn |
|
|||||||
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
||||
где fi – нелинейные функции координат состояния, совокупность ко- |
||||||||
и |
|
|
|
|
|
|
||
торых определяет направление движения изображающей точки M в |
||||||||
фазовом пространстве, т.е. вектор фазовой скорости f{x} = {f1; f2;…fn}. |
|
При этом fi определены непрерывны в области |xi(t)| |
≤ H, где |
H – некоторая полож тельная постоянная, и обращаются в начале ко- |
|
ординат в нуль: |
|
fi (0;0;...0)= 0. |
(2.160) |
ФункциейСЛяпунова называется некоторая скалярная функция координат состояния V(x1; x2;…xn), которая принимает вещественные значения и удовлетворяет следующим свойствам:
1)функция однозначная;
2)V{0} = 0;
3)непрерывная вместе со своими частными производными в об-
ласти |xi(t)| ≤ H, где H –некоторая положительная постоянная. Функция Ляпунова V{x} называется знакоопределенной (опре-
деленно-положительной или определенно-отрицательной), если в области |xi(t)| ≤ H она принимает значение только одного знака и обращается в нуль только в начале координат. Например,
81
•определенно-положительная функция V = x12 + x22 + x32 ;
•определенно-отрицательная функция V = −(x12 + x22 + x32 ).
Данные функции равны нулю только при x1 = x2 = x3= 0. Функция Ляпунова V{x} называется знакопостоянной (положи-
тельной или отрицательной), если в области |xi(t)| ≤ H она принимает значения только одного знака и обращается в нуль в конечном числе точек заданной области фазового пространства. Например:
•V = (x1 − x2 )2 , V{x} = 0 при x1 = x2, в том числе и при x1 = x2= 0;
•V = (x1 − x2 )2 + x32 . V{x} = 0 при x1 = x2 и при x3= 0.
Функция Ляпунова V{x} называется знакопеременной, если в об-
ласти |xi(t)| ≤ H она принимает значения разного знака и обращается в |
||||
|
|
|
|
И |
нуль в конечном числе точек заданной области фазового пространства. |
||||
Например: |
|
+ x2 . V{x} = 0 при x1 = x2 |
и при x3= 0. |
|
• V = x + x |
||||
1 |
2 |
3 |
Д |
|
Такая функция для определения устойчивости системы по пря- |
||||
мому методу Ляпунова не используется. |
|
|||
Наибольшее распространение для анализа широкого класса ли- |
||||
нейных и нелинейных систем получила функция Ляпунова в виде квадратичной формы (квадратичная функция)
|
|
|
n |
n |
|
|
, |
(2.161) |
|
V {x}=АP x x |
j |
||||||
|
|
|
∑∑ ij i |
|
|
|
||
|
|
|
i=1 |
j=1 |
|
|
|
|
|
б |
|
|
|
|
|
||
где Pij – постоянные коэфф ц енты. |
|
|
|
|
|
|||
Также квадратичную функцию Ляпунова можно представить в |
||||||||
и |
|
|
|
|
|
|
||
векторно-матричном виде |
|
|
|
|
|
|
|
|
С |
|
V |
{x}= xT Px ; |
|
|
|
(2.162) |
|
|
P11 |
P12 ... |
P1n |
|
||||
|
|
|
||||||
|
|
P |
P |
... |
|
|
|
(2.163) |
P = |
21 |
22 |
|
|
|
. |
||
|
|
|
|
|
|
|
|
|
|
... ... ... |
|
|
|
|
|||
|
|
Pn1 |
Pn2 ... |
Pnn |
|
|||
Используемая при записи квадратичной формы матрица является симметричной, в ней элементы симметричны относительно главной диагонали, т.е.
Pij = Pji . |
(2.164) |
||
|
|
|
82 |
|
|
|
|
|
|
|
|
|
|
|
|
Квадратичная форма функции Ляпунова (2.162) по критерию Сильвестра будет определенно-положительной, если каждый из ее главных диагональных миноров будет положительным:
∆ = P > 0; ∆ |
2 |
= |
|
P11 |
P12 |
|
> 0 и т.д. |
(2.165) |
|
|
|
||||||||
1 |
11 |
|
|
P21 |
P22 |
|
|
|
|
|
|
|
|
|
|
|
|
||
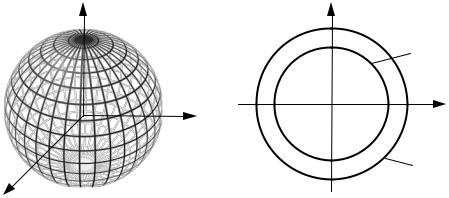
В фазовом пространстве постоянному значению простейшей квадратичной функции Ляпунова (V{x} = const) соответствует поверхность при n = 3 или плоскость при n = 2 (рис. 2.34).
а |
x3 |
x12 + x22 + x32 = С |
x2 |
б |
|
|
|
||||
|
|
|
x12 + x22 = С1 |
||
|
|
|
|
И |
|
x1 |
|
x2 |
|
x1 |
|
|
|
|
Д |
x12 + x22 = С2 |
|
|
|
|
А |
|
|
|
|
|
|
|
|
Рис. 2.33. Графическое представление функции Ляпунова: |
|||||
а – поверхность в трехмерном пространстве; б– плоскость в двухмерном |
|||||
|
|
пространстве |
|
|
|
|
|
и |
x |
|
|
Для систем, имеющих |
однозначную, непрерывную, нечётно- |
||||
симметричную нел нейность F(x), А.И. Лурье и В.М. Постниковым бы- |
|||||||||
С |
|
|
|
|
|
|
|
|
|
ла предложена функц я Ляпуновабкак квадратичная форма от коорди- |
|||||||||
нат состояния линейной части с стемы плюс интеграл от нелинейности: |
|||||||||
|
V {x}= xT Px + ∫F (x)dx . |
|
|
|
|
(2.166) |
|||
|
|
0 |
|
|
|
|
|
|
|
Для аналитического решения задачи установления устойчивости |
|||||||||
составим производную функции Ляпунова по времени |
|
||||||||
dV = |
∂V dx1 |
+ ∂V dx2 |
+... + |
∂V |
|
dxn |
. |
(2.167) |
|
∂x |
|
|
|
||||||
dt |
∂x dt |
∂x dt |
|
n |
|
dt |
|
||
|
1 |
2 |
|
|
|
|
|
|
|
Используя равенства (2.159), можно записать полную производ-
ную функции Ляпунова по времени, являющуюся общей функцией для системы и функции Ляпунова V{x}:
dV |
=W {x}= |
∂V |
f1 + |
∂V |
f2 +... + |
∂V |
fn . |
(2.168) |
||
dt |
∂x |
∂x |
∂x |
|||||||
|
|
1 |
|
2 |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
83 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Очевидно, что совокупность частных производных функции Ляпунова составляет градиент функции V{x}, т.е. вектор, определяемый проекциями ∂V/∂xi на оси координат фазового пространства
|
∂V ; |
∂V |
|
∂V |
|
|
|
V = |
;... |
. |
(2.169) |
||||
∂x2 |
|
||||||
|
∂x1 |
|
∂xn |
|
|||
Тогда в результате произведения градиента функции Ляпунова
V{x} и вектора фазовой скоростиf{x} = {f1; f2…fn} получается тоже некоторая скалярная функция координат состояния системы
|
dV =W {x}=V {x} f {x}, |
(2.170) |
|
dt |
|
где x – вектор координат состояния системы x = (x1; x2…xn). |
||
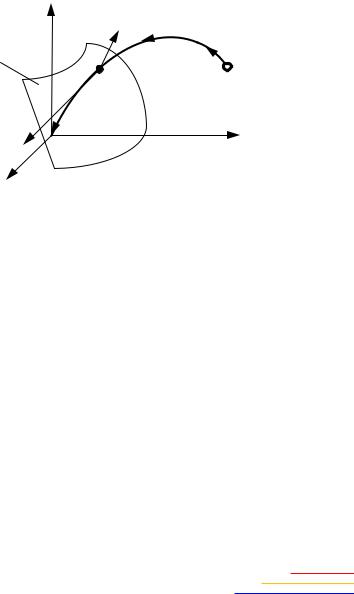
Вектор |
И |
V = const в каж- |
V{x} перпендикулярен к поверхности |
||
дой её точке x = (x1; x2…xn) и направлен в сторону возрастания значе- |
||||||
ния функции Ляпунова V{x} (рис. 2.34). |
|
|
||||
|
|
|
x3 |
Д |
|
|
|
|
|
|
V{x} |
|
|
x12 |
+ x22 + x32 = С |
А |
|
x2 |
||
|
|
б |
|
M |
M0 |
|
|
и |
|
|
|
|
|
|
|
f{x} |
|
|
|
|
С |
|
x1 |
|
|
|
|
|
|
|
|
|
||
Рис. 2.34. Граф ческое представление градиента функции Ляпунова
Если полная производная функции Ляпунова W{x} > 0, то, согласно формуле (2.170), вектор фазовой скорости f{x} составляет с вектором V{x} острый угол, фазовая траектория пересекает поверхность V{x} = const в сторону увеличения значений V{x}. Если же W{x} < 0, то угол между f{x} и V{x} тупой и фазовая траектория идет в сторону уменьшения значений V{x}. Уменьшение значений функции Ляпунова V{x} при пересечении её фазовой траекторией означает приближение последней к началу координат, в случае знакоопределенной V{x}, или к некоему стационарному состоянию, в сл учае знакопостоянной V{x}, т.е. стремление устойчивой системы к состоянию равновесия.
На основании вышеприведенных аналитических и графических заключений А.М. Ляпуновым были сформулированы следующие теоремы об устойчивости и неустойчивости нелинейных систем.
84

Теорема Ляпунова об устойчивости: если для системы, сво-
бодное движение которой описывается уравнениями (2.159), существует знакоопределенная функция V{x}, полная производная которой W{x} является знакопостоянной функцией противоположного знака, то система устойчива.
Теорема Ляпунова об асимптотической устойчивости: если для системы, свободное движение которой описывается уравнениями (2.159), существует знакоопределенная функция V{x}, полная производная которой W{x} является тоже знакоопределенной функцией противоположного знака, то система устойчива асимптотически.
Теорема Ляпунова о неустойчивости: если для системы, сво-
бодное движение которой описывается уравнениями (2.159), существует какая-нибудь функция V{x}, полная производная которой W{x} является тоже знакоопределенной функцией и в любой сколь угодно малой области вокруг начала координат имеет знак, совпадающий со знаком V{x}, то система неустойчива.
Рассмотрим пример исследования функции Ляпунова на знако-
определенность. Пусть дана квадратичная форма |
|
||||||||||||||||||||||
V = x2 |
+5x2 |
+3x2 |
+4x x |
|
|
|
И |
(2.171) |
|||||||||||||||
−2x x ,{x} R . |
|||||||||||||||||||||||
|
1 |
|
|
|
2 |
|
|
3 |
|
|
1 |
2 |
|
|
|
2 |
3 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||
Если записать данную квадратичную форму в матричной форме, |
|||||||||||||||||||||||
то элементами соответствующей матрицы будут: P11 = 1; P12 = P21 = 2; |
|||||||||||||||||||||||
P13 = P31 = 0; P22 = 5; P23 = P32 =А–1; P33 = 3. |
|
|
|
|
|
||||||||||||||||||
Тогда главные д агональные миноры матрицы P: |
|
||||||||||||||||||||||
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
и |
1 = P11 = 1; |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
∆2 = |
|
P11 |
|
P12 |
|
= |
|
|
1 2 |
|
|
=1; |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
С |
|
|
P21 |
|
P22 |
|
|
|
|
2 |
5 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
P11 |
|
P12 |
|
P13 |
|
|
|
1 |
2 |
|
|
|
0 |
|
= 2. |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
∆ |
3 |
= |
P P P |
= |
2 5 −1 |
|
|
||||||||||||||||
|
|
|
|
21 |
22 |
|
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
P31 |
|
P32 |
|
P33 |
|
|
|
0 |
−1 |
|
3 |
|
|
|
|||||
Так как все положительны, то по критерию Сильвестра данная квадратичная форма является определенно-положительной функцией.
Рассмотрим пример определения устойчивости нелинейной АСУ, свободное движение которой задано системой дифференциальных уравнений состояния 1-го порядка в форме Коши:
85

|
|
|
2 |
2 |
); |
x1 |
= −(x1 −βx2 )(1−ax1 |
−bx2 |
|||
|
|
|
|
|
(2.172) |
|
|
|
|
||
|
|
= −(x2 −αx1 )(1 |
2 |
2 |
), |
x2 |
−ax1 |
−bx2 |
|||
|
|
|
|
|
|
где α, β, а, b – положительные постоянные числа; x1, x2 – фазовые координаты состояния системы.
Для анализа устойчивости системы выбираем положительноопределенную функцию Ляпунова в виде квадратичной формы
|
|
V {x} |
= αx2 |
+βx2 |
. |
|
|
|
(2.173) |
||||||
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
Находим производную от функции Ляпунова по времени: |
|
||||||||||||||
|
dV = 2αx |
dx1 |
+2βx |
dx2 . |
(2.174) |
||||||||||
|
dt |
|
1 |
dt |
|
|
|
|
2 |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|||
Используя равенства (2.172), можно записать полную производ- |
|||||||||||||||
ную функции Ляпунова по времени: |
|
Д |
|
|
|
|
|||||||||
|
W {x}= dV |
= −2αx1 (x1 −βx2 )(1−ax12 −bx22 )− |
|
||||||||||||
|
dt |
|
А |
|
|
|
|
|
|
||||||
|
−2βx2 (x2 −αx1 )(1−ax12 −bx22 )= |
|
|||||||||||||
|
|
б |
|
)(αx1 |
+βx2 ). |
(2.175) |
|||||||||
|
= −2(1−ax1 |
−bx2 |
|||||||||||||
|
и |
2 |
|
|
2 |
|
|
|
2 |
|
2 |
|
|
|
|
Тогда полная производная функции Ляпунова W{x} < 0, соответ- |
|||||||||||||||
ственно устойчивость с |
стемы имеется в случае, когда |
|
|||||||||||||
|
С |
(1−ax1 |
−bx2 )> 0 |
|
|
|
(2.176) |
||||||||
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
или же |
|
ax2 |
+bx2 |
<1. |
|
|
|
|
|
(2.177) |
|||||
|
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
Границей устойчивости данной системы на плоскости её коор- |
|||||||||||||||
динат является эллипс (рис. 2.35). |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
x2 1 |
|
|
|
|
ax12 + bx22 = 1 |
|
|||||
Область устойчивости |
|
|
b |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.35. Граница устойчивости системы
86

Для примера анализа устойчивости методом Ляпунова нелинейной системы, имеющей однозначную нечётно-симметричную нелинейность F(x3), например, нелинейная характеристика «Зона нечувствительности» (см. табл. 1.1, п. 1), рассмотрим свободное движение нелинейной АСУ, заданное системой дифференциальных уравнений состояния 1-го порядка в форме Коши:
x1x2x3
= −x1 + F (x3 ); |
|
= −F (x3 ); |
(2.178) |
= (γ −1)x1 + γx2 −rF (x3 ), |
|
где x1, x2, x3 – фазовые координаты состояния системы; γ и r – положительные постоянные коэффициенты; F(x3) – нелинейная характеристика «Зона нечувствительности».
По рекомендациям А.И. Лурье и В.М. Постникова возьмем функцию Ляпунова как квадратичную форму от координат состояния
линейной части системы плюс интеграл от нелинейности: |
|
|||||||||||||
|
|
= |
|
γ − |
|
|
x12 |
+ γ |
x22 |
+ x3 |
И. |
(2.179) |
||
V {x} ( |
|
1) |
А |
∫ |
F (x3 )dx3 |
|
||||||||
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Данная функция V{x} является определенноД |
-положительной, так |
|||||||||||||
как при условии (γ – 1 > 0) она положительна c любыми значениями |
||||||||||||||
|
и |
|
|
|
|
|
|
|
|
|
||||
x1, x2, x3 и обращается в нуль только в начале координат. |
|
|||||||||||||
Находим про зводную от функции Ляпунова по времени: |
|
|||||||||||||
dV |
|
|
б2 dx |
2 dx |
|
|
dx |
|
||||||
dt |
= ( |
γ − |
1)x1 dt1 |
+ γx2 |
dt2 + F (x3 ) |
dt3 . |
(2.180) |
|||||||
Используя равенства (2.178), можно записать полную производ- |
||||||||||||||
ную функции Ляпунова по времени: |
|
|
|
|
|
|
||||||||
СdV |
|
|
|
|
2 |
|
|
+ F (x3 ))+ |
|
|||||
W |
{x} |
= |
dt |
= (γ −1)x1 (−x1 |
|
|||||||||
+γ x22 (−F (x3 ))+ F (x3 )((γ −1)x1 +γ x2 −rF (x3 ))= |
|
|||||||||||||
= −(γ −1)(F (x3 )− x1 )2 −(r +1−γ )(F (x3 ))2 . |
(2.181) |
|||||||||||||
Тогда полная производная функции Ляпунова W{x} < 0 в случае |
||||||||||||||
|
|
|
|
|
|
r > γ −1 > 0. |
|
|
|
(2.182) |
||||
Так как полная производная W{x} является знакопостоянной функцией противоположного V{x} знака, то система устойчива.
87