

4.2. Алгоритм переноса граничных условий на примере расчёта пластины
Рассмотрим
метод на примере двумерной задачи
расчёта напряжённо-деформированного
состояния жёстко заделанной квадратной
пластины. Пластина шириной Ь и толщиной
h
нагружена давлением q.
Поместим
её в систему декартовых координат
![]() .
(рисунок 4.1). Разделим мысленно пластину
параллельными линиями на n
интервалов по осям X
и Y
соответственно (штриховые линии на
рисунок 4.1). Индекс i
соответствует сечениям по оси X, индекс
j – сечениям по оси y.
Из числа элементов n2
выделим один с i-м
нижним и j-м
левым сечением (рисунок 4.2). Ширина
элемента:
.
(рисунок 4.1). Разделим мысленно пластину
параллельными линиями на n
интервалов по осям X
и Y
соответственно (штриховые линии на
рисунок 4.1). Индекс i
соответствует сечениям по оси X, индекс
j – сечениям по оси y.
Из числа элементов n2
выделим один с i-м
нижним и j-м
левым сечением (рисунок 4.2). Ширина
элемента:
![]() .
.
В
каждом сечении элемента пластины будет
действовать переменная эпюра напряжений.
При уменьшении размеров элементов в
сечении согласно принципам механики
для твердого тела напряжённое состояние
можно представить силами, сосредоточенными
в центре и моментами. Для таких деформаций
пластины с симметричным нагруженном
касательными и нормальными силами по
осям х и y
можно пренебречь [96]. Таким образом в
каждом сечении будем учитывать: изгибавший
момент М вокруг срединной линии,
параллельной плоскости пластины,
крутящий момент К и перерезывающую силу
![]() , параллельную вертикальной оси Z.
, параллельную вертикальной оси Z.

Рисунок 4.1 - Схема расчеления пластины на элементы
Угол поворота от изгибающего момента будем обозначать , угол поворота от крутящего момента - , перемещение в направлении перерезывающей силы –W. На (рисунке 4.2) показано положительное направление этих перемещений. Параметры М, К, , , , w в сечениях, перпендикулярных осям х и у будем снабжать индексами х и у соответственно. Индексы i , j соответствуют номеру сечений по оси x и у.
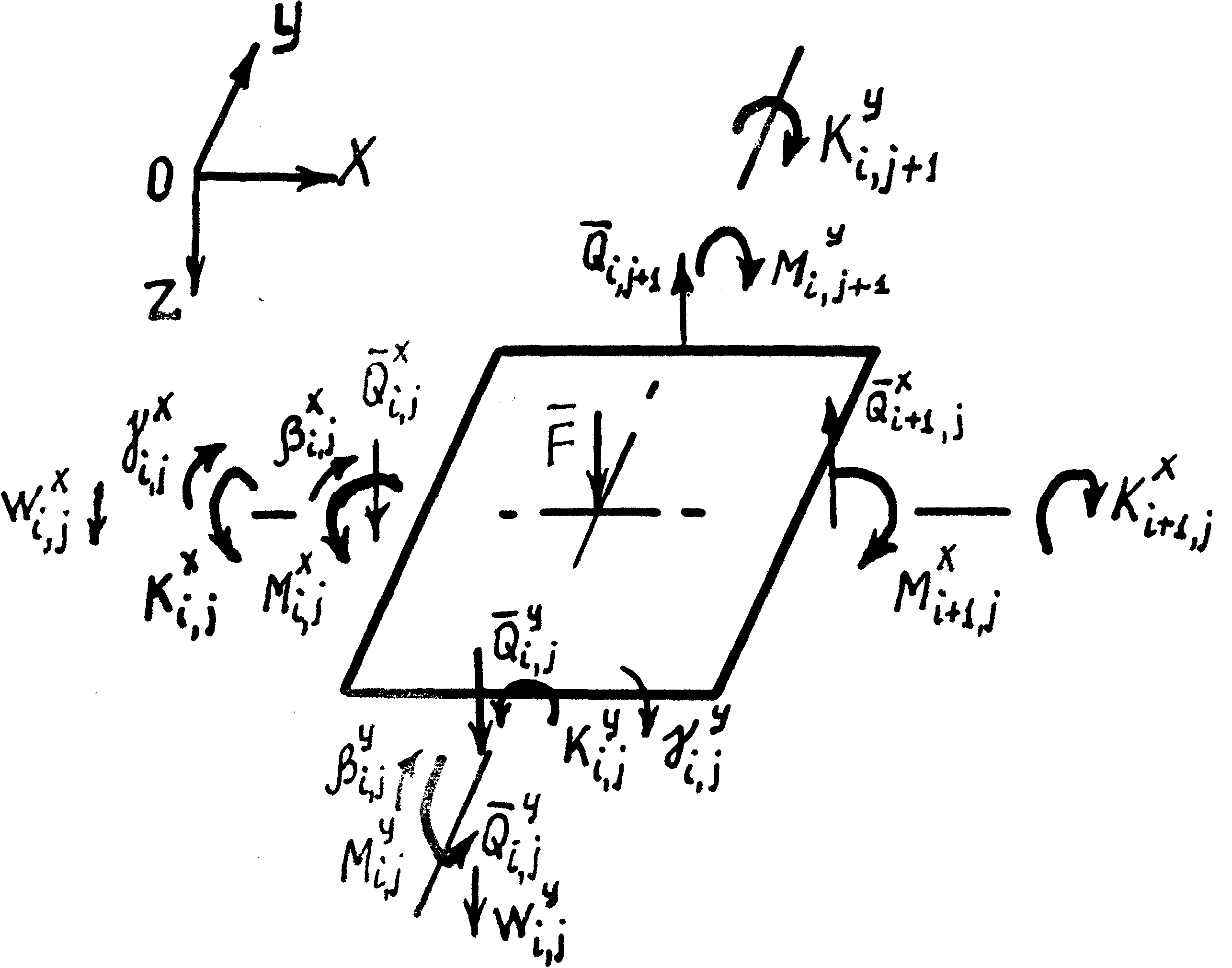
Рисунок 4.2 - Усилия и перемещения на краях выделенного
элемента пластины
Для составления алгоритма метода механической прогонки будем пользоваться следующими уравнениями для выделенного элемента. Уравнениями статического равновесия:
![]() ;
(4.1)
;
(4.1)
![]() ;
(4.2)
;
(4.2)
![]() .
(4.3)
.
(4.3)
Здесь
распределённая нагрузка q
для малого элемента с достаточной
степенью точности
заменена
сосредоточенной силой
в центре элемента:
![]() (4.4)
(4.4)
Как
показали экспериментально-теоретические
исследования [28, 83] моделирование
распределённой нагрузки эквивалентной
системой дискретных сил достаточно
точно обеспечивается для элементов
оболочек при числе сил
![]() 8.
8.
Физические уравнения, полученные на основе закона Гука и гипотезы прямых нормалей для элемента пластины [24]
![]() ;
(4.5)
;
(4.5)
![]() ;
(4.6)
;
(4.6)
![]() ;
(4.7)
;
(4.7)
![]() .
(4.8)
.
(4.8)
Где:
Е- модуль Юнга ;
![]() ,
,
![]() -
моменты инерции на изгиб
-
моменты инерции на изгиб
![]() ;
;
![]() - коэффициент
Пуассона
- коэффициент
Пуассона
![]() ;
;
![]() ;
;
![]() -момент
инерции на кручение
-момент
инерции на кручение
![]() ;
;
![]() -
малоизменяемый
коэффициент [97]
-
малоизменяемый
коэффициент [97]
![]() при
при
![]() 10.
10.
В дальнейшем предполагается для каждого элемента задавать разные значения нагрузок F, модуля E, геометрических размеров. Это позволит решать задачи несущей способности конструкций с учётом теплового и динамического нагружения, анизотропии свойств [98,99,100,101].
Уравнения
совместности деформаций используем в
форме метода перекрёстных связей,
развитие которого получило в работе
[24]. В центре элемента перемещения (![]() )
и углы поворота (
)
и углы поворота (![]() )
равны, если каждый элемент рассматривать
как окончание балки, идущей по оси Х с
одной стороны и окончание балки, идущей
по оси У с другой стороны (рисунок 4.З).
)
равны, если каждый элемент рассматривать
как окончание балки, идущей по оси Х с
одной стороны и окончание балки, идущей
по оси У с другой стороны (рисунок 4.З).
![]() ;
(4.9)
;
(4.9)
![]() ;
(4.10)
;
(4.10)
![]() (4.11)
(4.11)
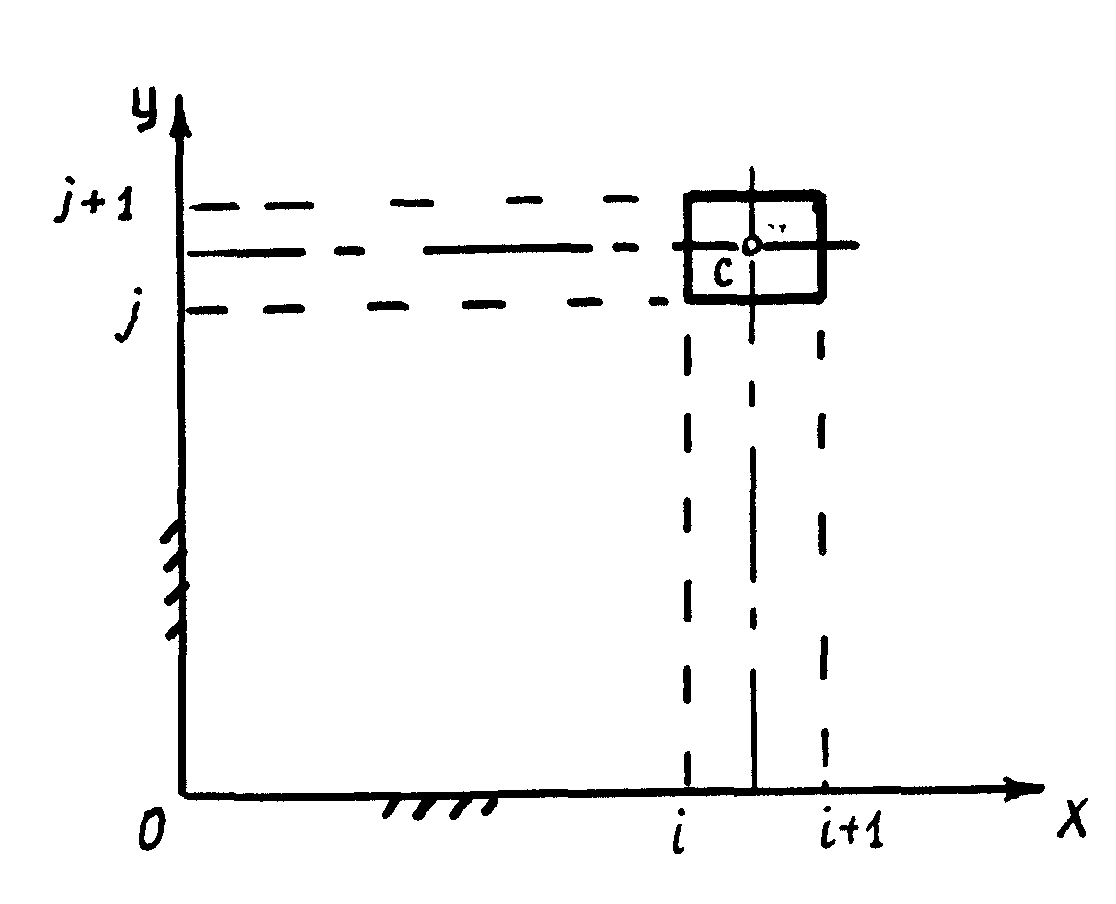
Рисунок 4.3 – Схема расположения элемента на перекрестных связях
Углы поворота и перемещения в центре определим интегрированием упругой срединной линии элемента. Интегрирование проводим с использованием производных в соотношениях (4.5) - (4.6), отдельно двигаясь по оси X от левого сечения направо к центру и по оси У от нижнего сечения вверх к центру элемента (рисунок 4.2). Получим. с учётом (4.9 – 4.11)
![]() ;
(4.12)
;
(4.12)
![]() (4.13)
(4.13)
 (4.14)
(4.14)
Условия
на
границе элемента
![]() зависят от параметров предыдущих
элементов.
зависят от параметров предыдущих
элементов.
Прогонка по механическим параметрам начинается с граничных условий, где для жёстко заделанной пластины [94]
![]() ;
(4.15)
;
(4.15)
![]() ;
(4.16)
;
(4.16)
Например,
начиная с левого нижнего элемента
пластины, выразим :
![]() из системы (4.12) - (4.13) через
из системы (4.12) - (4.13) через
![]() (рисунок 4.4). В последующем параметры
всех элементов будем выражать через
неизвестные силовые факторы на левой
границе пластины
(рисунок 4.4). В последующем параметры
всех элементов будем выражать через
неизвестные силовые факторы на левой
границе пластины
![]() и силовые факторы на верхней границе
пластины
и силовые факторы на верхней границе
пластины
![]() .
Прогонку проводим снизу вверх по каждой
вертикальной полосе и, выразив параметры
последнего верхнего элемента, переходим
к следующей вертикальной полосе элементов
слева направо.
.
Прогонку проводим снизу вверх по каждой
вертикальной полосе и, выразив параметры
последнего верхнего элемента, переходим
к следующей вертикальной полосе элементов
слева направо.
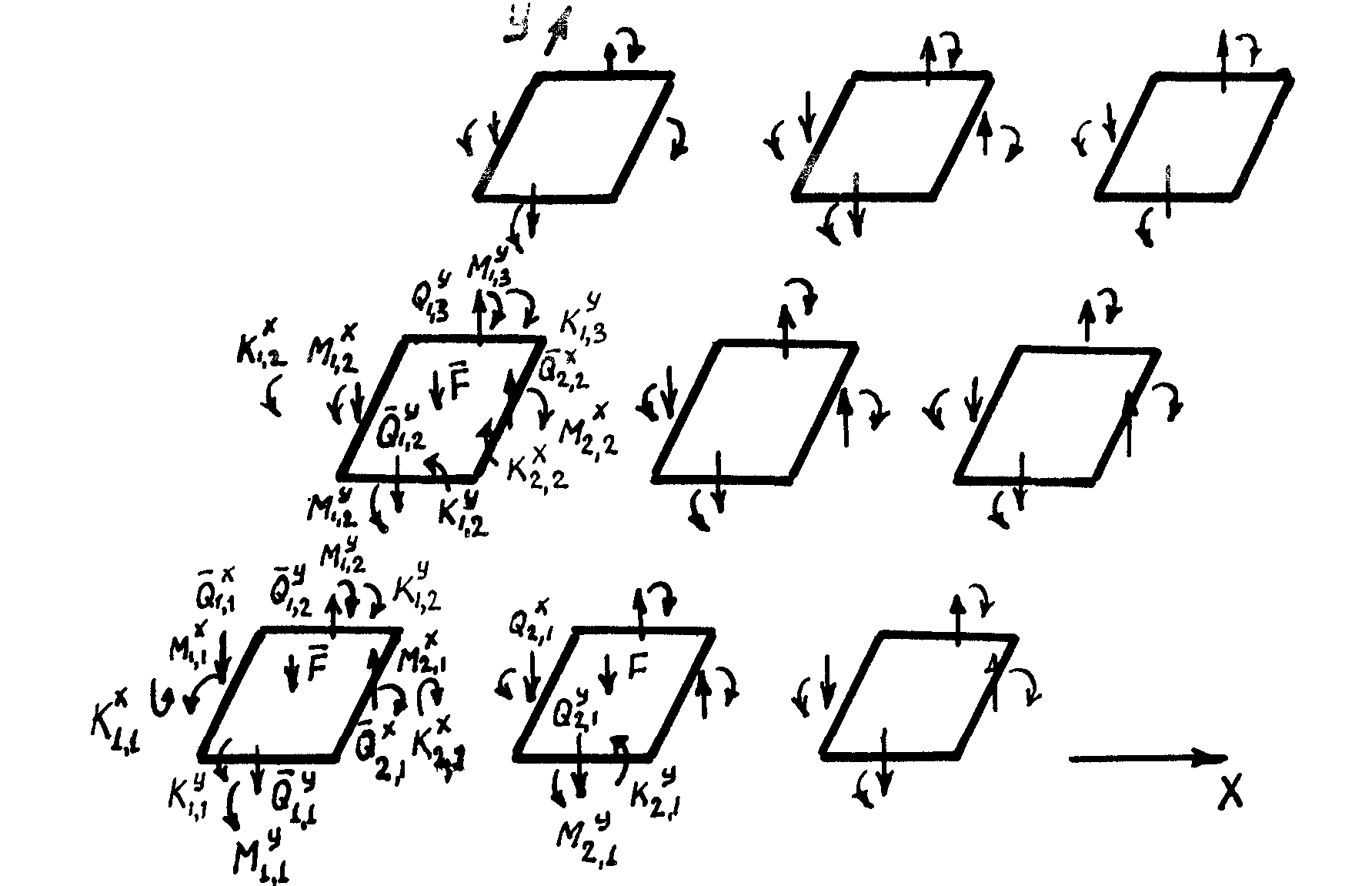
Рисунок 4.4 – Схема расчленения пластины на элементы с обозначением индексов силовых факторов на краях для составления алгоритма прогонки
При рассмотрении последующих элементов начальные условия на их границе определяют интегрированием упругой линии элемента по оси y
 (4.17)
(4.17)
![]() ;
(4.18)
;
(4.18)
 (4.19)
(4.19)
и по оси X
 (4.20)
(4.20)
![]() (4.21)
(4.21)
 (4.22)
(4.22)
Центральной
процедурой прогонки является, определение
для любого элемента с номером ( i
, j
) силовых факторов
![]() на верхней границе (рисунок 4.2) через
левые боковые силовые факторы следующего
верхнего элемента с номером ( i
, j+1
)-
на верхней границе (рисунок 4.2) через
левые боковые силовые факторы следующего
верхнего элемента с номером ( i
, j+1
)-
![]() .
Для этого из системы уравнений (4.1)- (4.3)
найдём правые боковые силовые факторы
.
Для этого из системы уравнений (4.1)- (4.3)
найдём правые боковые силовые факторы
![]() у элемента с номером ( i
, j
) в зависимости от остальных силовых
факторов. Подставим их в систему (4.17) -
(4.19). Далее составим уравнения совместности
деформаций (4.12) - (4.14) для следующего
вертикального элемента с номером ( i
, j+1
), подставив туда начальные условия
у элемента с номером ( i
, j
) в зависимости от остальных силовых
факторов. Подставим их в систему (4.17) -
(4.19). Далее составим уравнения совместности
деформаций (4.12) - (4.14) для следующего
вертикального элемента с номером ( i
, j+1
), подставив туда начальные условия
![]() из системы (4.17)-(4.19) предыдущего элемента.
из системы (4.17)-(4.19) предыдущего элемента.