

3. Определение безусловного максимума функции нескольких переменных.
3.1. Постановка задачи и ее геометрическая интерпретация. Линии равного уровня.
![]() (3.1).
по вектору
(3.1).
по вектору
![]() ,
где
,
где![]() и область допустимых значенийV
задана условиями
и область допустимых значенийV
задана условиями
![]() (3.2).
(3.2).
Заметим, что в дальнейшем все области допустимых значений варьируемых переменных, задаваемые только в виде автономных ограничений (3.2) будем обозначать буквой V, а области, где присутствуют ограничения типа связи и (или) функциональные ограничения по-прежнему буквой D.
Таким
образом по постановке задачи сразу
можно будет отличать задачу на нахождение
целевого максимума
![]() ,
от задачи на нахождение безусловного
максимума
,
от задачи на нахождение безусловного
максимума![]() .
.
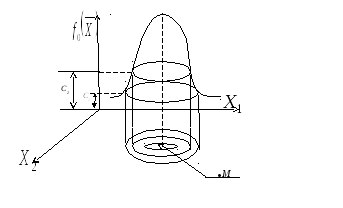
Рис. 3.1.
Рассмотрим
![]() - функция двух переменных (рис. 3.1). Для
ее изображения необходимо трехмерное
пространство, что неудобно. Поэтому
функцию двух переменных обычно изображают
на плоскости варьируемых переменных
X1,
X2
в виде линий равного уровня (рис. 3.2).
Координаты X1
и X2
любой точки линии равного уровня дадут
одно и то же значение целевой функции
- функция двух переменных (рис. 3.1). Для
ее изображения необходимо трехмерное
пространство, что неудобно. Поэтому
функцию двух переменных обычно изображают
на плоскости варьируемых переменных
X1,
X2
в виде линий равного уровня (рис. 3.2).
Координаты X1
и X2
любой точки линии равного уровня дадут
одно и то же значение целевой функции
![]() .
Внутри линий равного уровня отображается
точка максимумаM.
Чем ближе расположена линия равного
уровня к точке максимума, тем большему
значению целевой функции она соответствует.
Так на рисунке 3.1 имеем С2
> С1.
.
Внутри линий равного уровня отображается
точка максимумаM.
Чем ближе расположена линия равного
уровня к точке максимума, тем большему
значению целевой функции она соответствует.
Так на рисунке 3.1 имеем С2
> С1.
Задавая
границы
![]() и
и![]() i=1,2
получаем множество допустимых значений
варьируемых переменных V
в виде
прямоугольника (рис. 3.2).
i=1,2
получаем множество допустимых значений
варьируемых переменных V
в виде
прямоугольника (рис. 3.2).

Рис. 3.2
Если
![]() вV
имеет единственный max,
то функция выпукла, иначе может быть
несколько решений (локальных максимумов
- точки М1
и М2
на рис. 3.3), среди которых необходимо
выбрать наибольшее (глобальный максимум).
вV
имеет единственный max,
то функция выпукла, иначе может быть
несколько решений (локальных максимумов
- точки М1
и М2
на рис. 3.3), среди которых необходимо
выбрать наибольшее (глобальный максимум).
Методы определения максимума здесь также делятся на аналитические и численные.

 Рис.
3.3
Рис.
3.3
Аналитический метод решения задачи. Аналитический метод использует необходимое условие max функции нескольких переменных:
Для
того чтобы в точке
![]() функция
функция![]() ,
необходимо, чтобы
,
необходимо, чтобы![]() (3.3),
для всехi=1,2…n. Для
выделения точек максимума необходимо
также проверить знаки диагональных
миноров матрицы вторых производных
(матрицы Гессе).
(3.3),
для всехi=1,2…n. Для
выделения точек максимума необходимо
также проверить знаки диагональных
миноров матрицы вторых производных
(матрицы Гессе).
В общем случае:
 (3.4)
(3.4)
Для функции двух переменных:
 (3.5)
(3.5)
 (3.6)
(3.6)
где
![]() -
главный определитель матрицы.
-
главный определитель матрицы.
В зависимости от знака возможны три случая:
0 – экстремум отсутствует, точка перегиба,
= 0 – требуется дополнительное исследование,
0 – экстремум есть, причем в случае
![]() 0
и
0
и
![]()
0, это max,
а при
0, это max,
а при
![]() 0
и
0
и
![]()
0 – min.
0 – min.
Пример.
Определить максимум функции
![]() ;
;

Откуда
![]() ,
,![]()
 0
0
![]()
 0
0
![]() ,
,
откуда
![]()
0, т.е.
0, т.е.
![]() ,
,![]() - точкаmax,
т.к.
- точкаmax,
т.к.
![]()
0 и
0 и
![]()
0.
0.
Численные методы решения задачи (методы многомерного поиска).
Численные
методы многомерного поиска будем
рассматривать на примере нахождения
максимума функции двух переменных.
Такие функции, как показано выше (раздел
3.1.), изображаются на плоскости
![]() в виде линий равного уровня.
в виде линий равного уровня.
Наложение
автономных ограничений на переменные
![]() приводит к выделению на плоскости
области допустимых решенийV
в виде прямоугольника(рис. 3.4).
приводит к выделению на плоскости
области допустимых решенийV
в виде прямоугольника(рис. 3.4).
Метод направленного перебора.
Данный метод аналогичен методу равномерного поиска для функции одной переменной.
Делим
области допустимых значений
![]() и
и![]() на равные отрезки таким образом, чтобы
количество отрезков по обеим осям было
равно
на равные отрезки таким образом, чтобы
количество отрезков по обеим осям было
равно ,
где
,
где![]() - величина допустимой погрешности.
- величина допустимой погрешности.![]() .
Проведя перпендикуляры к осям во всех
выделенных точках, получаем сетку на
плоскостиX1,
X2
с количеством узлов
.
Проведя перпендикуляры к осям во всех
выделенных точках, получаем сетку на
плоскостиX1,
X2
с количеством узлов
![]() (рис. 3.4). Вычисляем значения
(рис. 3.4). Вычисляем значения![]() во всех узлах (рис. 3.4.). Сравниваем
полученные значения и за решение
принимаем координаты узла с наибольшим
значением целевой функции
во всех узлах (рис. 3.4.). Сравниваем
полученные значения и за решение
принимаем координаты узла с наибольшим
значением целевой функции![]() .
.
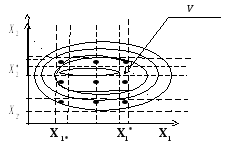
Рис. 3.4.
Чем меньше шаг сетки, тем точнее результат, но и выше трудоемкость. На практике данный метод применяется только для вычисления глобального максимума невыпуклых функций.
Все остальные применяемые на практике методы, представляют собой итерационные многошаговые процедуры, в которых на каждом шаге расчета должно получаться большее значение целевой функции, чем на предыдущем.
Каждый метод включает в себя:
правило перехода от одного шага к другому,
правило остановки расчета.
В зависимости от правила перехода численные методы делятся на:
методы нулевого порядка, в которых правило перехода требует вычисления только самой целевой функции,
методы первого порядка (градиентные методы) в которых требуется вычисление первых частных производных целевой функции,
методы второго порядка – требуют вычисления вторых частных производных целевой функции.
Ниже будут рассмотрены только методы нулевого и первого порядков, т.к. в задачах оптимизации с возможными неточностями в исходных данных и с функциями, заданными алгоритмически, характерными для оптимизации технологических процессов, вычисление матрицы вторых производных приводит к значительным ошибкам и методы второго порядка не находят применения.