

4. Картины скоростей и частот вращения
Кинематическое исследование спроектированного планетарного редуктора удобно производить графически. Представление о распределении скоростей точек его звеньев можно получить, построив картину скоростей.
Вектор скорости точки А колеса 1 (рис. 5) изображается в виде отрезка
![]()
где
![]() масштабный коэффициент
картины скоростей, мс-1/мм;
масштабный коэффициент
картины скоростей, мс-1/мм;
![]() ;
;
![]() ,
C - угловая
скорость 1-го колеса, /I/
об/мин - его частота вращения.
,
C - угловая
скорость 1-го колеса, /I/
об/мин - его частота вращения.
Определение скоростей точек радиальной прямой колеса определится наклонной прямой ОА', проходящей через точки О и А'. Прямая распределения скоростей точек блока сателлитов 2,2’пройдет через точки А' и P, где Р - мгновенный центр вращения блока. Отрезок ВВ' пропорционален скорости точки В - оси сателлитов. Прямая распределения скоростей водила В’O проходит через точку В’ и O, находящуюся на центральной оси вращения.

Рис. 5. Картины скоростей и частот вращения
Для получения наглядного представления о частотах вращения n (или угловых скоростях ω) звеньев редуктора строят картину частот вращения. С этой целью, выбрав некоторую точку О’ за начало отсчета, по горизонтальной оси откладывают отрезок
![]() пропорциональный
известной величине частоты вращения
n,
(или ω1);
пропорциональный
известной величине частоты вращения
n,
(или ω1);
![]() масштабный
коэффициент картины частот вращения.
Проведя из точки 1 прямую, параллельную
закону распределения скоростей точек
колеса 1 - ОА'
до пересечения с перпендикуляром к
горизонтали в точке О',
получат точку О”.
Лучи, проведенные из О'
параллельно наклонным прямым АР
и OВ’,
на пересечении с горизонтальной осью
дают точки 2 и h;
отрезки О'2 и
О'h
пропорциональны соответственно частотам
вращения блока сателлитов 2, 2' и водила
h:
масштабный
коэффициент картины частот вращения.
Проведя из точки 1 прямую, параллельную
закону распределения скоростей точек
колеса 1 - ОА'
до пересечения с перпендикуляром к
горизонтали в точке О',
получат точку О”.
Лучи, проведенные из О'
параллельно наклонным прямым АР
и OВ’,
на пересечении с горизонтальной осью
дают точки 2 и h;
отрезки О'2 и
О'h
пропорциональны соответственно частотам
вращения блока сателлитов 2, 2' и водила
h:
![]()
Примечание. Отрезок О'2 отложен в сторону отрицательного направления численной оси что означает, что блок сателлитов вращается в направлении, обратном направлению вращения колеса 1. Подобным образом строят картины скоростей и частот вращения для других типов планетарных редукторов. Так, на рис.6 они построены для редуктора сх.С при входном водиле h
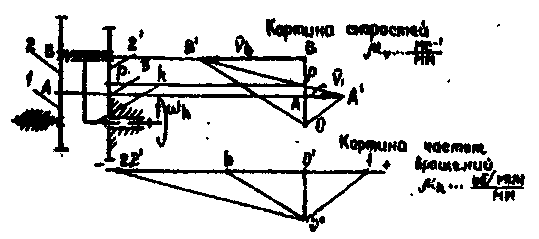
Рис.6. Картины скоростей и частот вращения для редуктора сх.С
1. Цель и задачи проектирования зубчатой передачи
Проектирование зубчатой передачи ставит целью определение ее размеров и качественных характеристик, зависящих от геометрии зацепления.
Правильно спроектированная передача позволяет добиться существенного повышения изгибной и контактной выносливости, уменьшения трения и изнашивания зубьев. При проектировании приходится решать и некоторые специальные задачи, например, вписывание в заданное межосевое расстояние.
Вычисленные в результате расчётов размеры передач нередко являются определяющими при проектировании различных узлов машины и существенно влияют на её габариты, а надежность и долговечность работы напрямую зависит от качества спроектированной передачи. Это тем более важно, что зубчатые механизмы являются наиболее распространенным видом механических передач и устанавливаются в большинстве современных машин.

Рис. 1. Схема механизмов машины:
I – двигатель, II – редуктор, III – рычажный механизм;
1, 2, 2′, 3 – Зубчатые колёса
2. Исходные данные и их анализ
Зубчатые механизмы в большинстве машин представленных в заданиях на курсовой проект, устанавливается между двигателем и рычажным механизмом (рис.1) и предназначены для передачи вращения от ротора двигателя к входному валу этого механизма со значениями частот вращения в пределах требуемого передаточного отношения:
![]()
где
![]() - частота вращения ротора двигателя,
об/мин;
- частота вращения ротора двигателя,
об/мин;
![]() - частота вращения входного звена
рычажного механизма, об/мин.
- частота вращения входного звена
рычажного механизма, об/мин.
При заданной общей кинематической схеме зубчатых механизмов, куда входят рядовые зубчатые передачи, планетарные редукторы т.п. необходимо произвести разбивку общего передаточного отношения на частные значения, произведение которых равно этому общему
![]() ,
,
где
![]() - передаточное отношение зубчатого
редуктора (обычно планетарного);
- передаточное отношение зубчатого
редуктора (обычно планетарного);
![]() ,
,
![]() - передаточные отношения рядовых зубчатых
передач.
- передаточные отношения рядовых зубчатых
передач.
В одних заданиях на курсовой проект
числа зубьев проектируемой зубчатой
пары заданы, например
![]() и
и
![]() ,
в других же их предстоит определить
через известное передаточное отношение
,
в других же их предстоит определить
через известное передаточное отношение
![]() ,
межосевое расстояние aw
и модуль m.
,
межосевое расстояние aw
и модуль m.
В этом случае
![]() с
округлением до ближайшего целого числа,
с
округлением до ближайшего целого числа,
![]() ,
которое также округляется.
,
которое также округляется.
Если задано суммарное число зубьев
![]() ,
то
,
то
![]() .
.
Примечание. Нужно проверить, чтобы после округления и было выдержано условие
![]() .
.
В некоторых случаях числа зубьев колёс
могут быть не заданы, как не задано
межосевое расстояние и передаточное
отношение. В этом случае рекомендуется
выбрать
в интервале 11…15, а
![]() ,
где должно быть
,
где должно быть
![]() ,
в редких случаях до 6.
,
в редких случаях до 6.
Помимо чисел зубьев и модуля заданными
являются параметры инструментов реечного
типа – гребёнки:
![]() - угол профиля зуба инструмента;
- угол профиля зуба инструмента;
![]() - коэффициент высоты головки зуба
инструмента;
- коэффициент высоты головки зуба
инструмента;
![]() - коэффициент радиального зазора
инструмента.
- коэффициент радиального зазора
инструмента.